
一种三位直缝自动焊接机器人.pdf

一吃****春艳

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种三位直缝自动焊接机器人.pdf
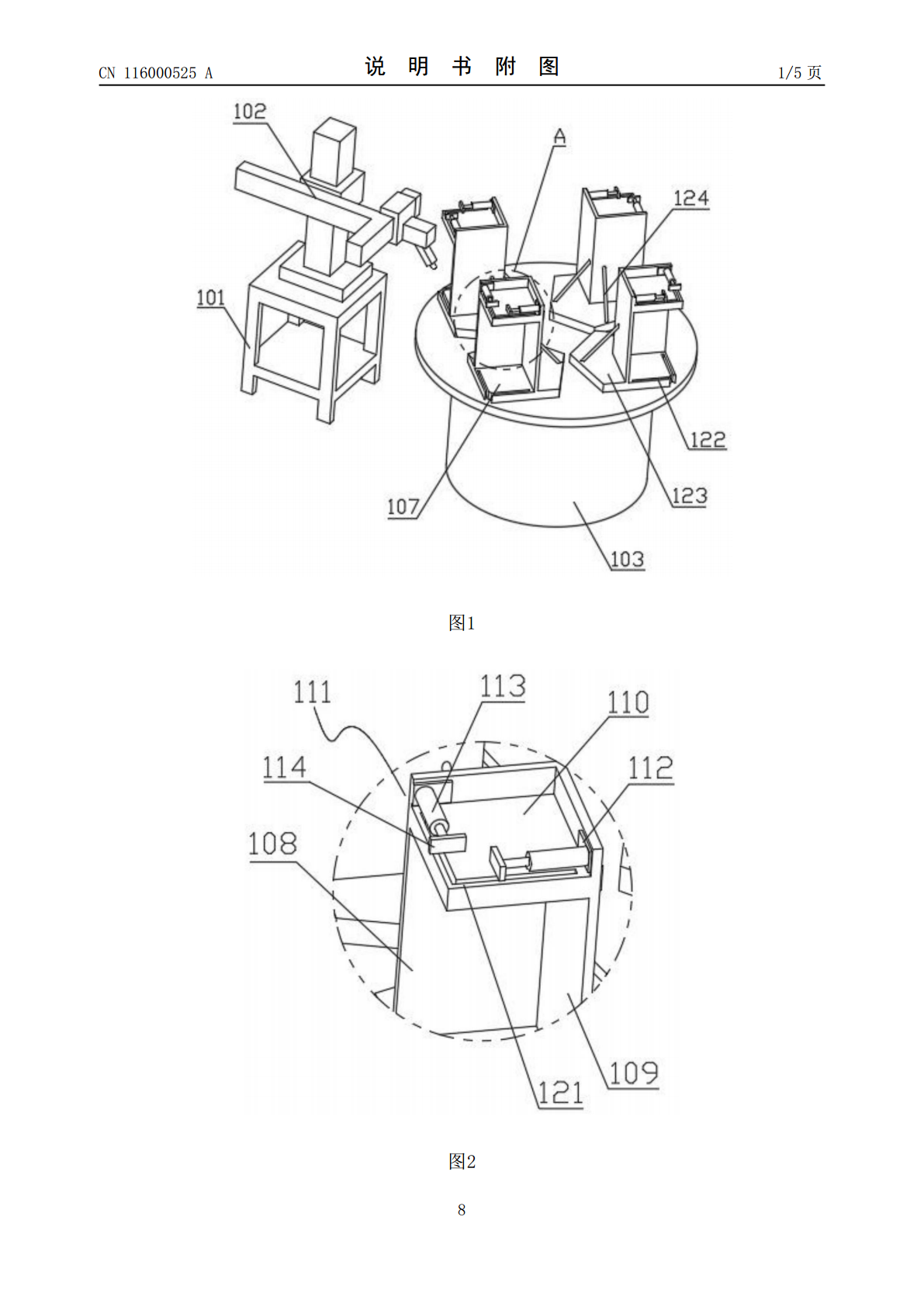
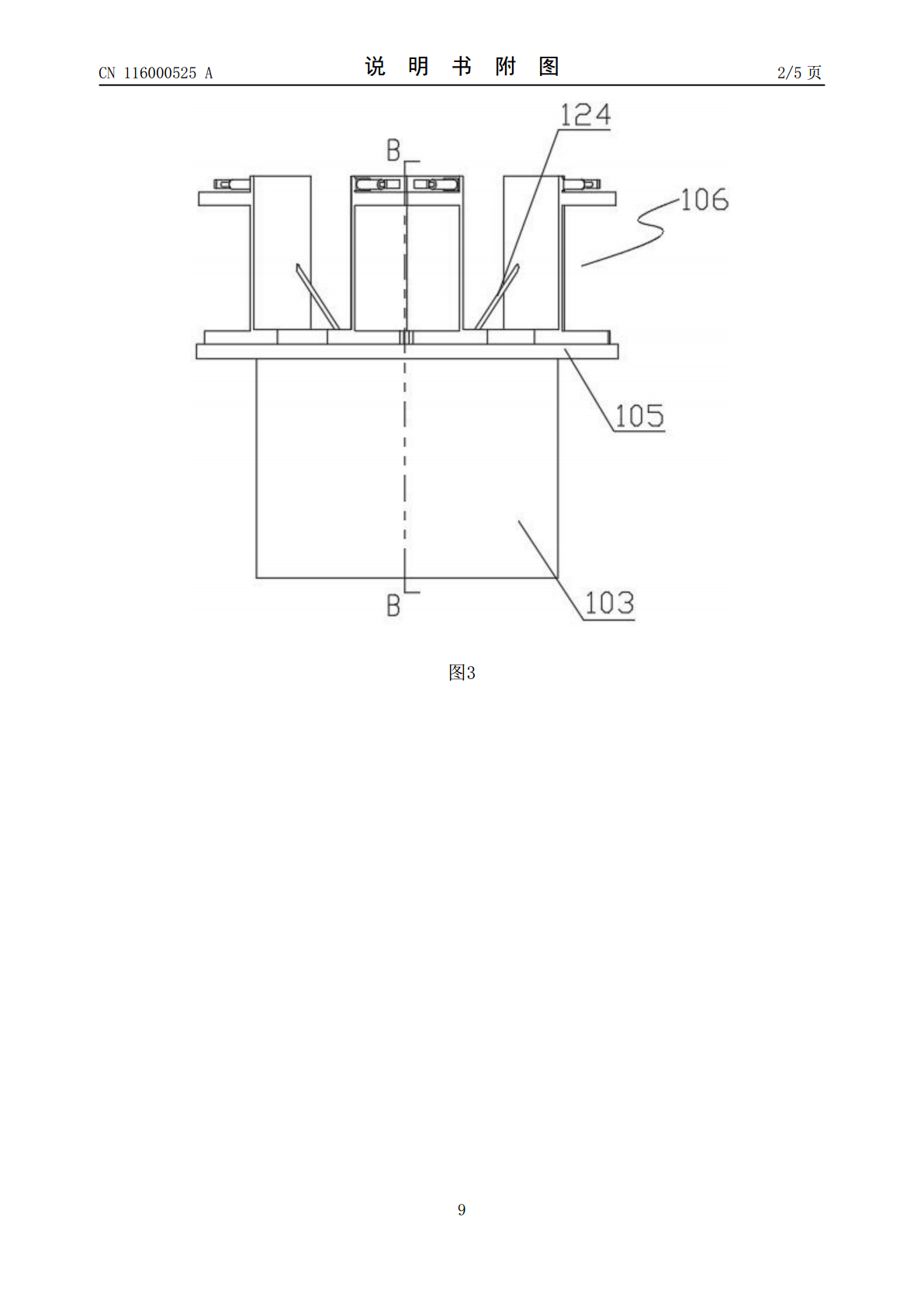
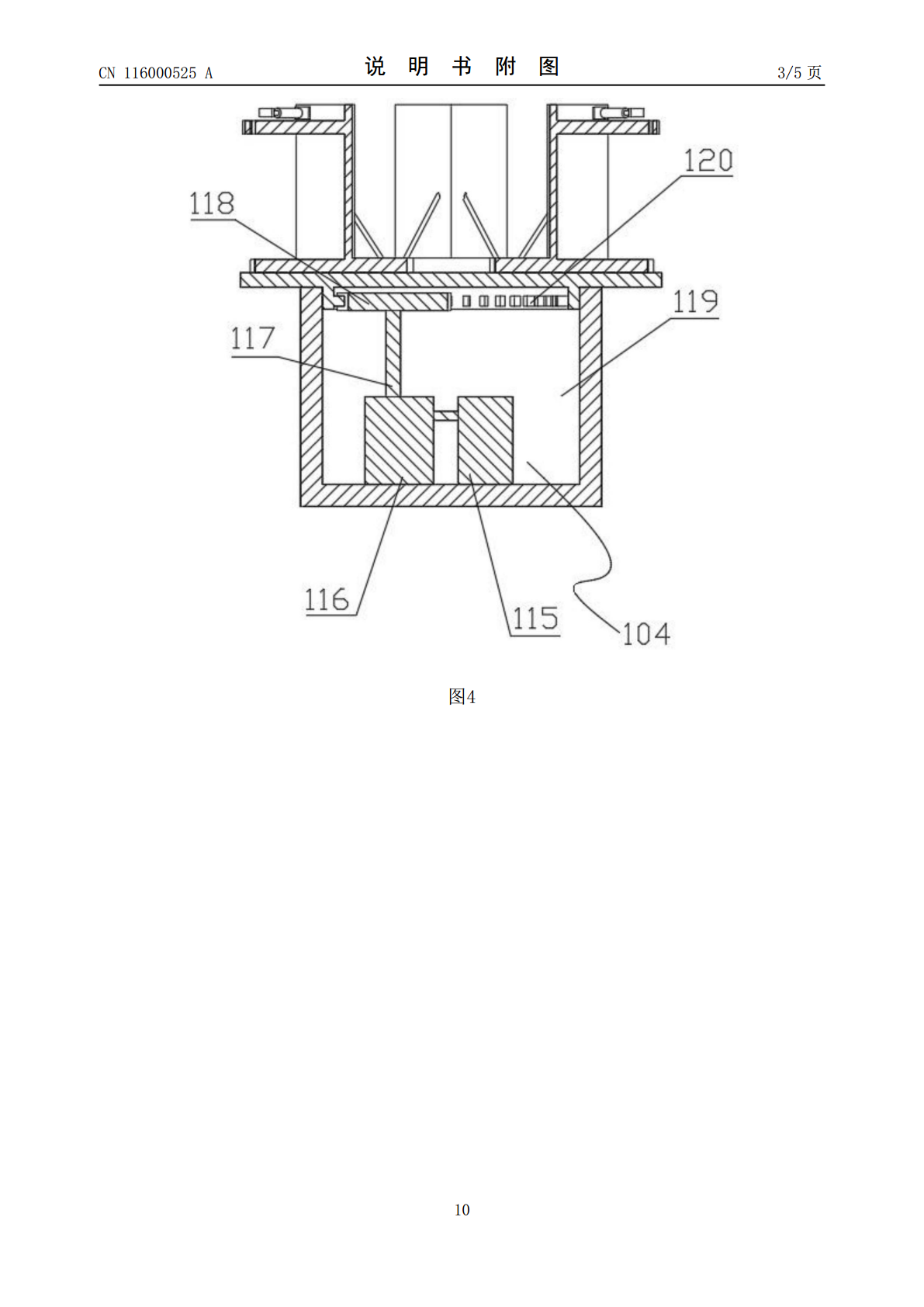
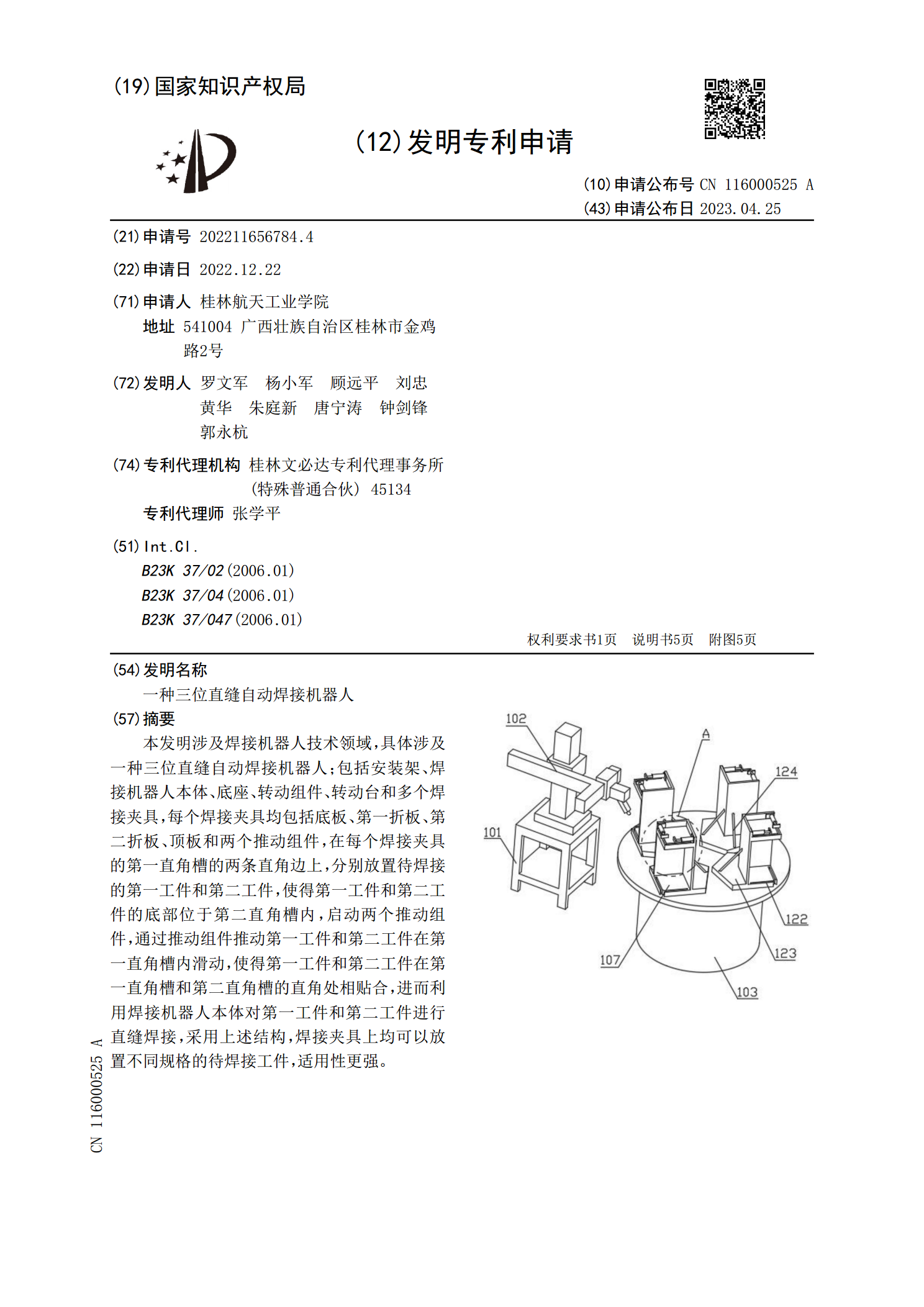
本发明涉及焊接机器人技术领域,具体涉及一种三位直缝自动焊接机器人;包括安装架、焊接机器人本体、底座、转动组件、转动台和多个焊接夹具,每个焊接夹具均包括底板、第一折板、第二折板、顶板和两个推动组件,在每个焊接夹具的第一直角槽的两条直角边上,分别放置待焊接的第一工件和第二工件,使得第一工件和第二工件的底部位于第二直角槽内,启动两个推动组件,通过推动组件推动第一工件和第二工件在第一直角槽内滑动,使得第一工件和第二工件在第一直角槽和第二直角槽的直角处相贴合,进而利用焊接机器人本体对第一工件和第二工件进行直缝焊接,
自动直缝焊接装置.pdf
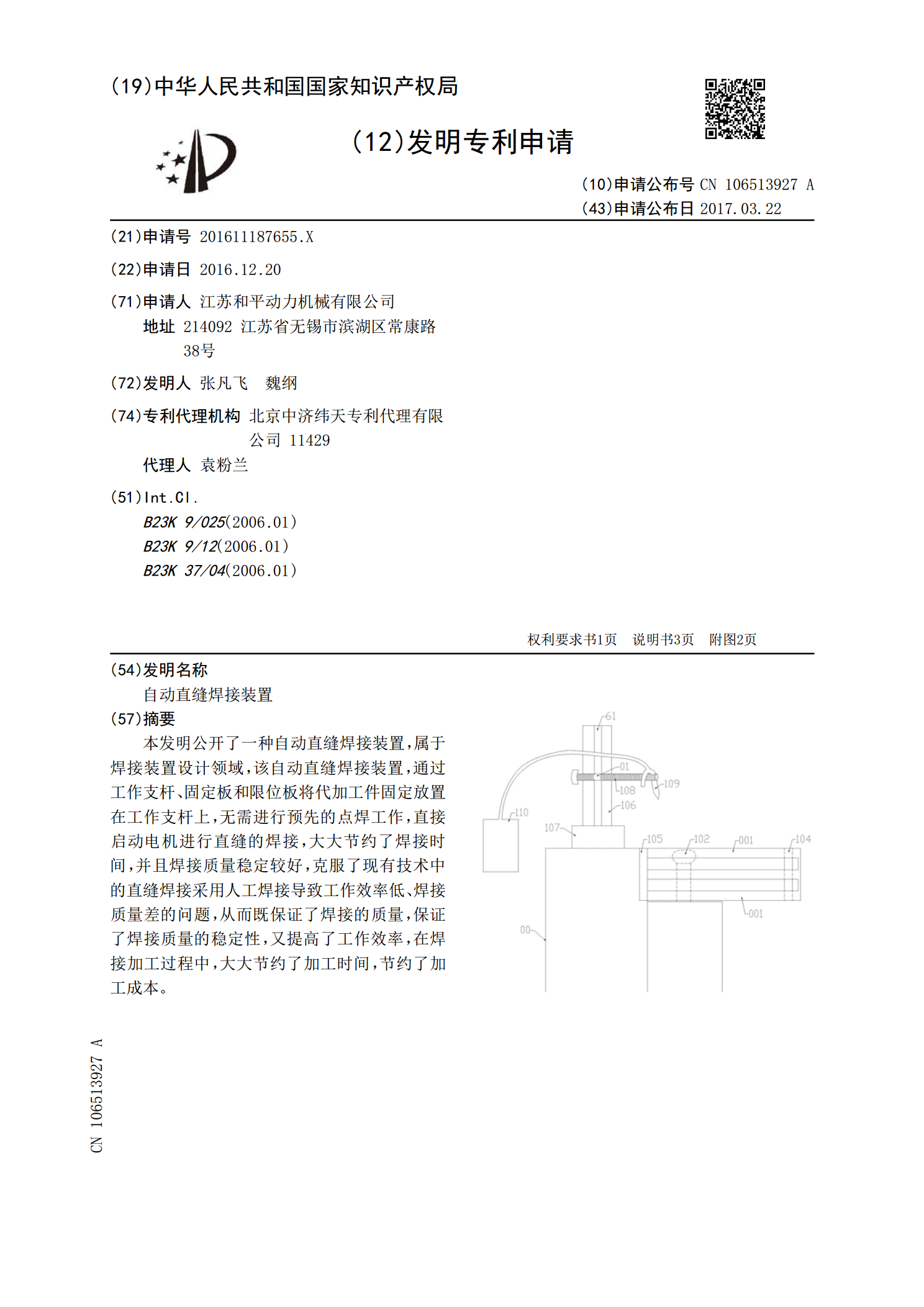
本发明公开了一种自动直缝焊接装置,属于焊接装置设计领域,该自动直缝焊接装置,通过工作支杆、固定板和限位板将代加工件固定放置在工作支杆上,无需进行预先的点焊工作,直接启动电机进行直缝的焊接,大大节约了焊接时间,并且焊接质量稳定较好,克服了现有技术中的直缝焊接采用人工焊接导致工作效率低、焊接质量差的问题,从而既保证了焊接的质量,保证了焊接质量的稳定性,又提高了工作效率,在焊接加工过程中,大大节约了加工时间,节约了加工成本。
一种自动直缝焊接机.pdf
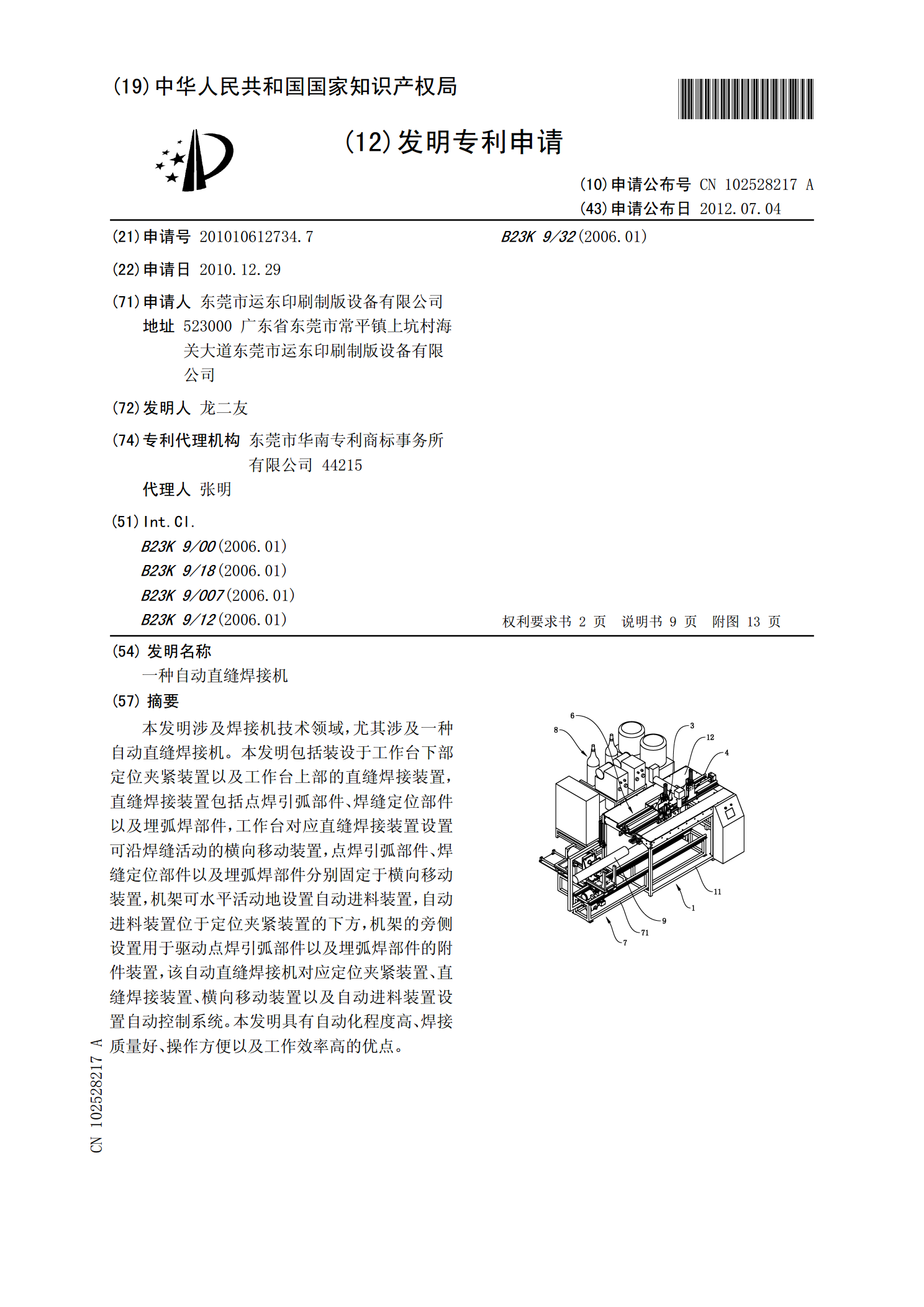
本发明涉及焊接机技术领域,尤其涉及一种自动直缝焊接机。本发明包括装设于工作台下部定位夹紧装置以及工作台上部的直缝焊接装置,直缝焊接装置包括点焊引弧部件、焊缝定位部件以及埋弧焊部件,工作台对应直缝焊接装置设置可沿焊缝活动的横向移动装置,点焊引弧部件、焊缝定位部件以及埋弧焊部件分别固定于横向移动装置,机架可水平活动地设置自动进料装置,自动进料装置位于定位夹紧装置的下方,机架的旁侧设置用于驱动点焊引弧部件以及埋弧焊部件的附件装置,该自动直缝焊接机对应定位夹紧装置、直缝焊接装置、横向移动装置以及自动进料装置设置自
一种自动化直缝焊接设备.pdf
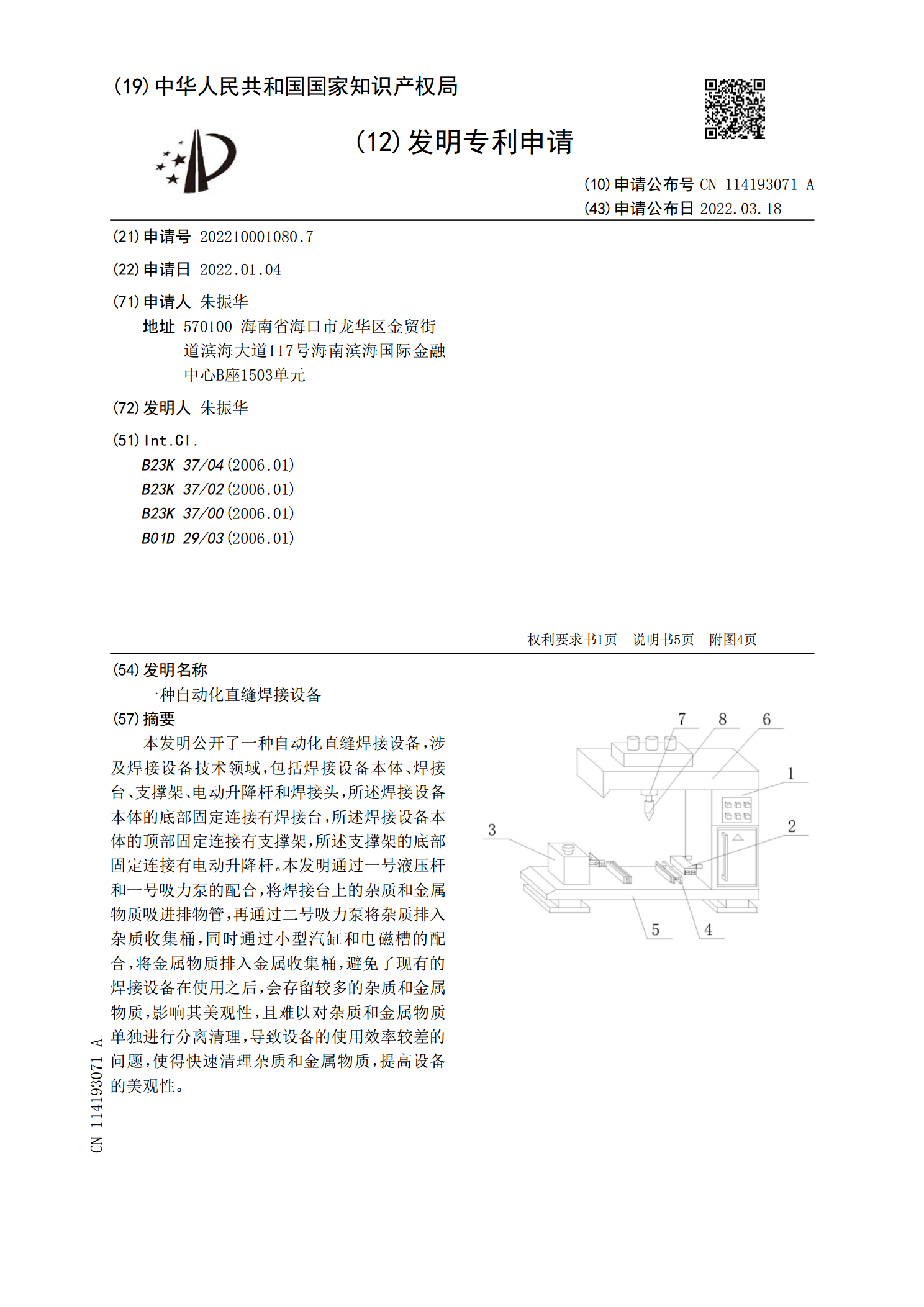
本发明公开了一种自动化直缝焊接设备,涉及焊接设备技术领域,包括焊接设备本体、焊接台、支撑架、电动升降杆和焊接头,所述焊接设备本体的底部固定连接有焊接台,所述焊接设备本体的顶部固定连接有支撑架,所述支撑架的底部固定连接有电动升降杆。本发明通过一号液压杆和一号吸力泵的配合,将焊接台上的杂质和金属物质吸进排物管,再通过二号吸力泵将杂质排入杂质收集桶,同时通过小型汽缸和电磁槽的配合,将金属物质排入金属收集桶,避免了现有的焊接设备在使用之后,会存留较多的杂质和金属物质,影响其美观性,且难以对杂质和金属物质单独进行分

烧结网滤芯直缝自动焊接设备.pdf
本发明公开了一种烧结网滤芯直缝自动焊接设备,包括:冷凝器壳体;所述冷凝器壳体内纵向安装有若干换热管;若干所述换热管由挡液板分为上部换热管和下部换热管;所述挡液板倾斜设置在所述冷凝器中间部分;所述挡液板与所述上部换热管、所述下部换热管之间留有间歇;相对低的所述挡液板一端与所述冷凝器壳体壁之间留有间歇。本发明中倾斜设置的挡液板能够使得上部传热管凝结的冷媒凝结水直接排入冷凝器底部,这样大大减薄了下部传热管的液膜厚度,避免了下部换热管液膜包裹阻碍换热的问题,大大提高了冷凝器的冷凝效果。