
一种驱动结构、光伏清洁机器人及控制方法.pdf

努力****弘毅


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种驱动结构、光伏清洁机器人及控制方法.pdf
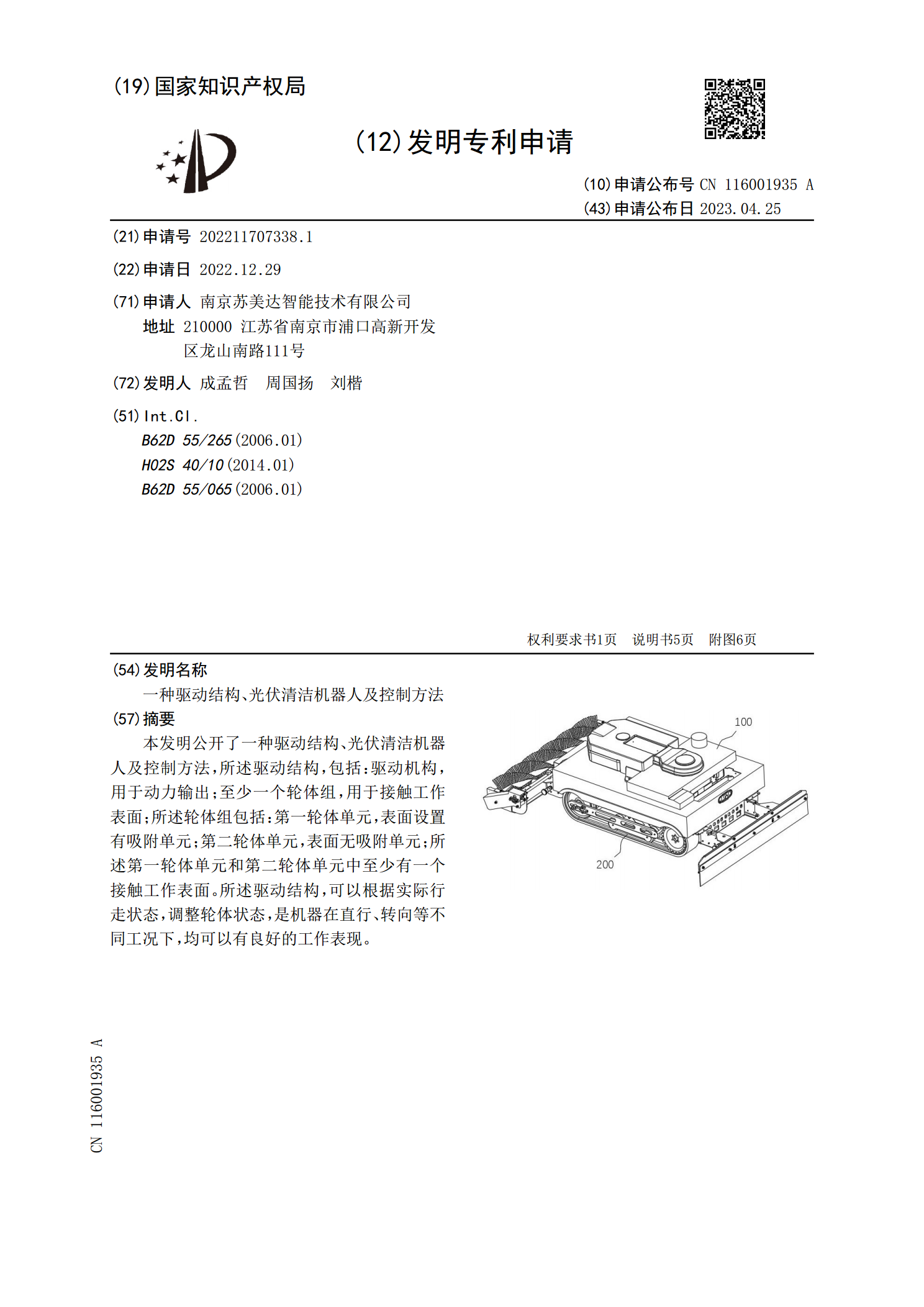
本发明公开了一种驱动结构、光伏清洁机器人及控制方法,所述驱动结构,包括:驱动机构,用于动力输出;至少一个轮体组,用于接触工作表面;所述轮体组包括:第一轮体单元,表面设置有吸附单元;第二轮体单元,表面无吸附单元;所述第一轮体单元和第二轮体单元中至少有一个接触工作表面。所述驱动结构,可以根据实际行走状态,调整轮体状态,是机器在直行、转向等不同工况下,均可以有良好的工作表现。

一种用于光伏组件清洁机器人的履带驱动结构.pdf
本发明公开了一种用于光伏组件清洁机器人的履带驱动结构,包括两块前后间隔设置的固定板,两块所述固定板之间设置有子转动组件、主转动组件、副转动组件、传动履带,所述子转轴组件沿左右方向均匀排列设置有若干个,所述主转动组件与所述副转动组件沿左右方向间隔设置于所述子转动组件的上方,所述子转动组件包括子连接轴、子齿轮盘,所述主转动组件包括主连接轴、主齿轮盘,所述副转动组件包括副连接轴副齿轮盘,所述传动履带的内侧壁设置有齿条,所述齿条与所述主齿轮盘、子齿轮盘、副齿轮盘相互啮合,本发明可有效避免在清扫过程中出现的光伏组件

一种可转动的柔性驱动光伏清洁系统及控制方法.pdf
本发明公开了一种可转动的柔性驱动光伏清洁系统及控制方法,涉及光伏组件清扫技术领域。包括驱动单元和清洁单元,驱动单元包括闭环绳索和驱动模块,清洁单元包括滚刷和动力轮,滚刷与闭环绳索传动连接,动力轮与滚刷传动连接,动力轮与光伏阵列表面接触,闭环绳索在所述驱动模块的牵引下运动时,驱动所述滚刷旋转,动力轮从旋转的滚刷获得动力带动清洁单元向前运动,实现对整个光伏阵列的清洁。所以,本发明采用柔性驱动实现清洁单元和驱动单元的分离,以及滚刷的旋转,可以大幅度提高清洁效果和降低运动部分的重量,减少驱动能量消耗,节约了能源。
一种光伏清洁机器人.pdf
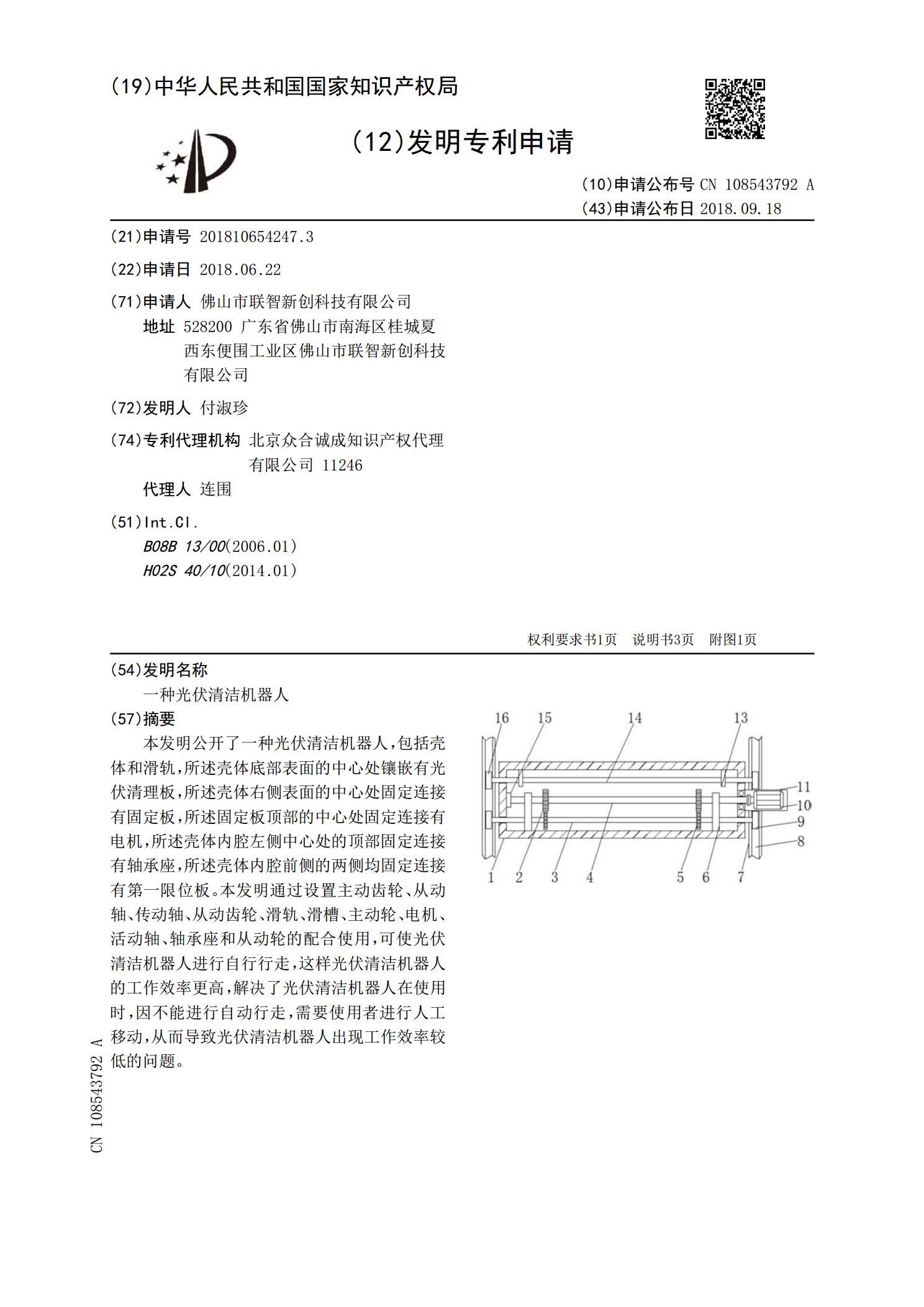
本发明公开了一种光伏清洁机器人,包括壳体和滑轨,所述壳体底部表面的中心处镶嵌有光伏清理板,所述壳体右侧表面的中心处固定连接有固定板,所述固定板顶部的中心处固定连接有电机,所述壳体内腔左侧中心处的顶部固定连接有轴承座,所述壳体内腔前侧的两侧均固定连接有第一限位板。本发明通过设置主动齿轮、从动轴、传动轴、从动齿轮、滑轨、滑槽、主动轮、电机、活动轴、轴承座和从动轮的配合使用,可使光伏清洁机器人进行自行行走,这样光伏清洁机器人的工作效率更高,解决了光伏清洁机器人在使用时,因不能进行自动行走,需要使用者进行人工移动

一种光伏发电站光伏板清洁机器人.pdf
本发明涉及一种光伏发电站光伏板清洁机器人,包括机架、主动行走机构、辅助行走机构、清洁驱动机构、安装在所述清洁驱动机构上的毛刷辊和安装在所述清洁驱动机构上的清洗棉辊;本发明提供的清洁机器人可以对光伏发电站大面积的光伏板进行自动化清洁,清洁过程中可以主动移动,且可以进行一轮清扫和二轮清洗,保证了光伏板清洁的彻底性,具有自携带清洁水的功能,免去了需外接拖拉水管,因而更加便携,清洁过程中使得用水更加科学合理化,避免了不必要的浪费。