
用于升降机构的控制方法、装置、处理器及可读存储介质.pdf

Ja****44

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于升降机构的控制方法、装置、处理器及可读存储介质.pdf
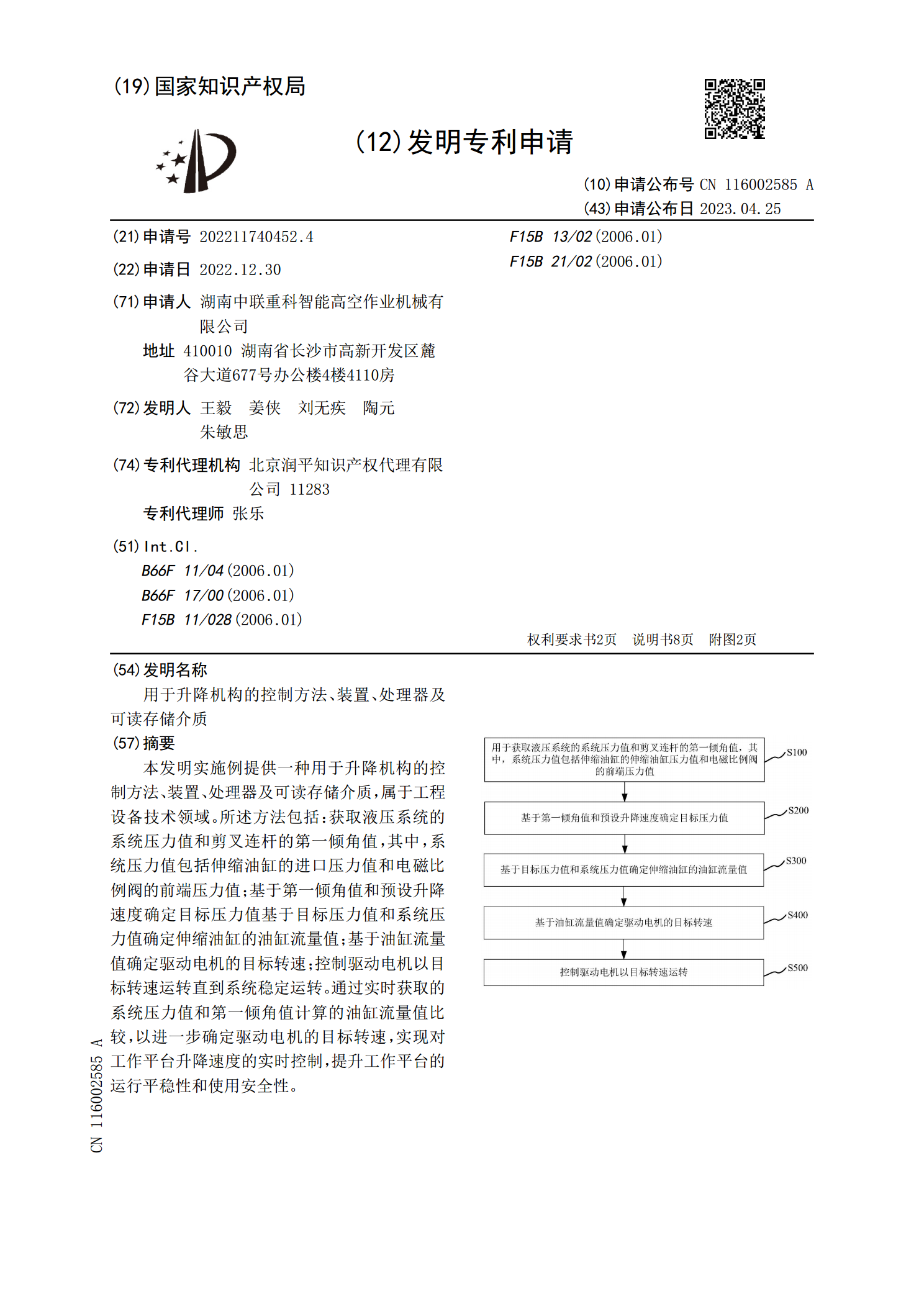
本发明实施例提供一种用于升降机构的控制方法、装置、处理器及可读存储介质,属于工程设备技术领域。所述方法包括:获取液压系统的系统压力值和剪叉连杆的第一倾角值,其中,系统压力值包括伸缩油缸的进口压力值和电磁比例阀的前端压力值;基于第一倾角值和预设升降速度确定目标压力值基于目标压力值和系统压力值确定伸缩油缸的油缸流量值;基于油缸流量值确定驱动电机的目标转速;控制驱动电机以目标转速运转直到系统稳定运转。通过实时获取的系统压力值和第一倾角值计算的油缸流量值比较,以进一步确定驱动电机的目标转速,实现对工作平台升降速度
QoS控制方法、装置及处理器可读存储介质.pdf
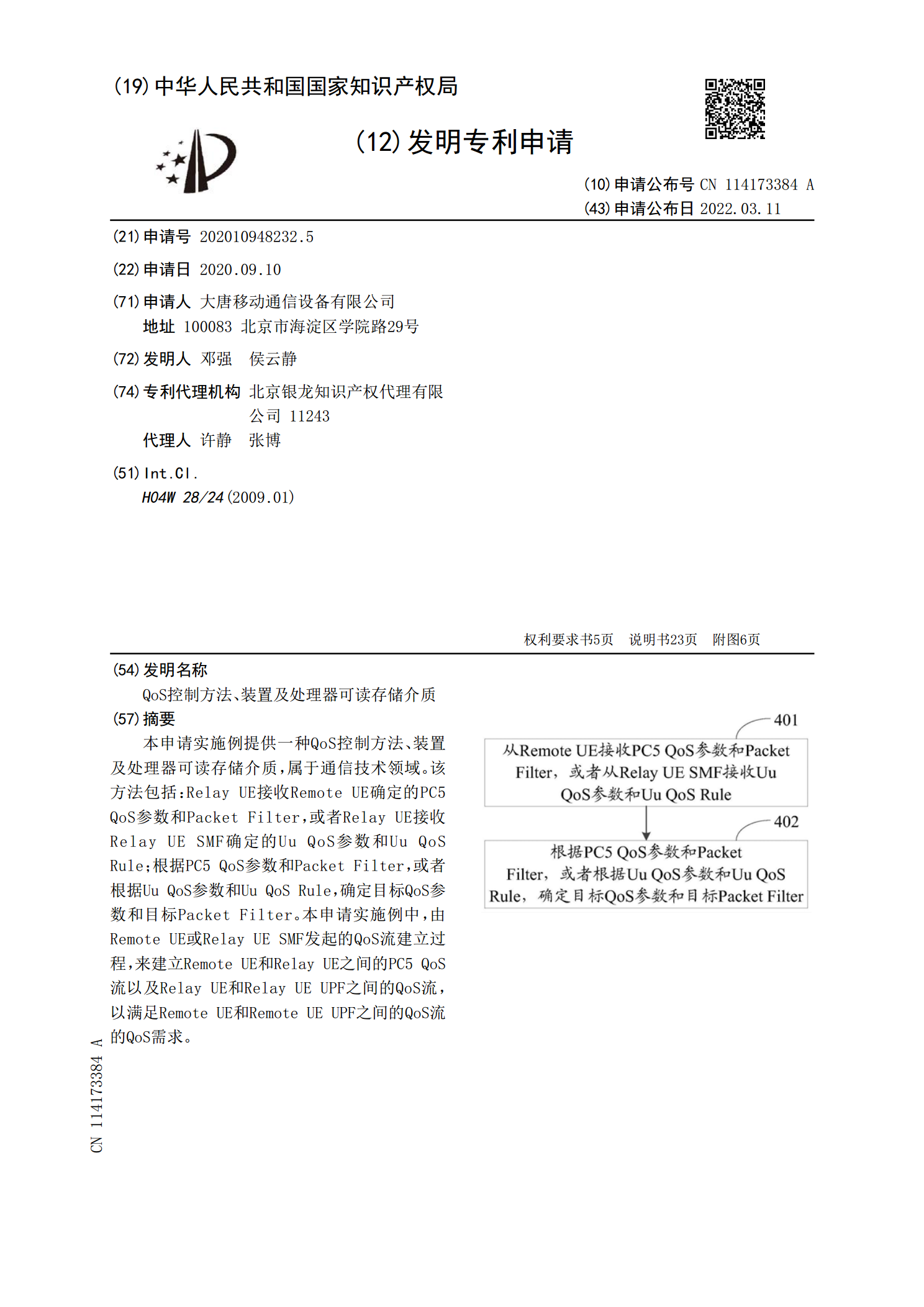
本申请实施例提供一种QoS控制方法、装置及处理器可读存储介质,属于通信技术领域。该方法包括:RelayUE接收RemoteUE确定的PC5QoS参数和PacketFilter,或者RelayUE接收RelayUESMF确定的UuQoS参数和UuQoSRule;根据PC5QoS参数和PacketFilter,或者根据UuQoS参数和UuQoSRule,确定目标QoS参数和目标PacketFilter。本申请实施例中,由RemoteUE或RelayUESMF发起的QoS流
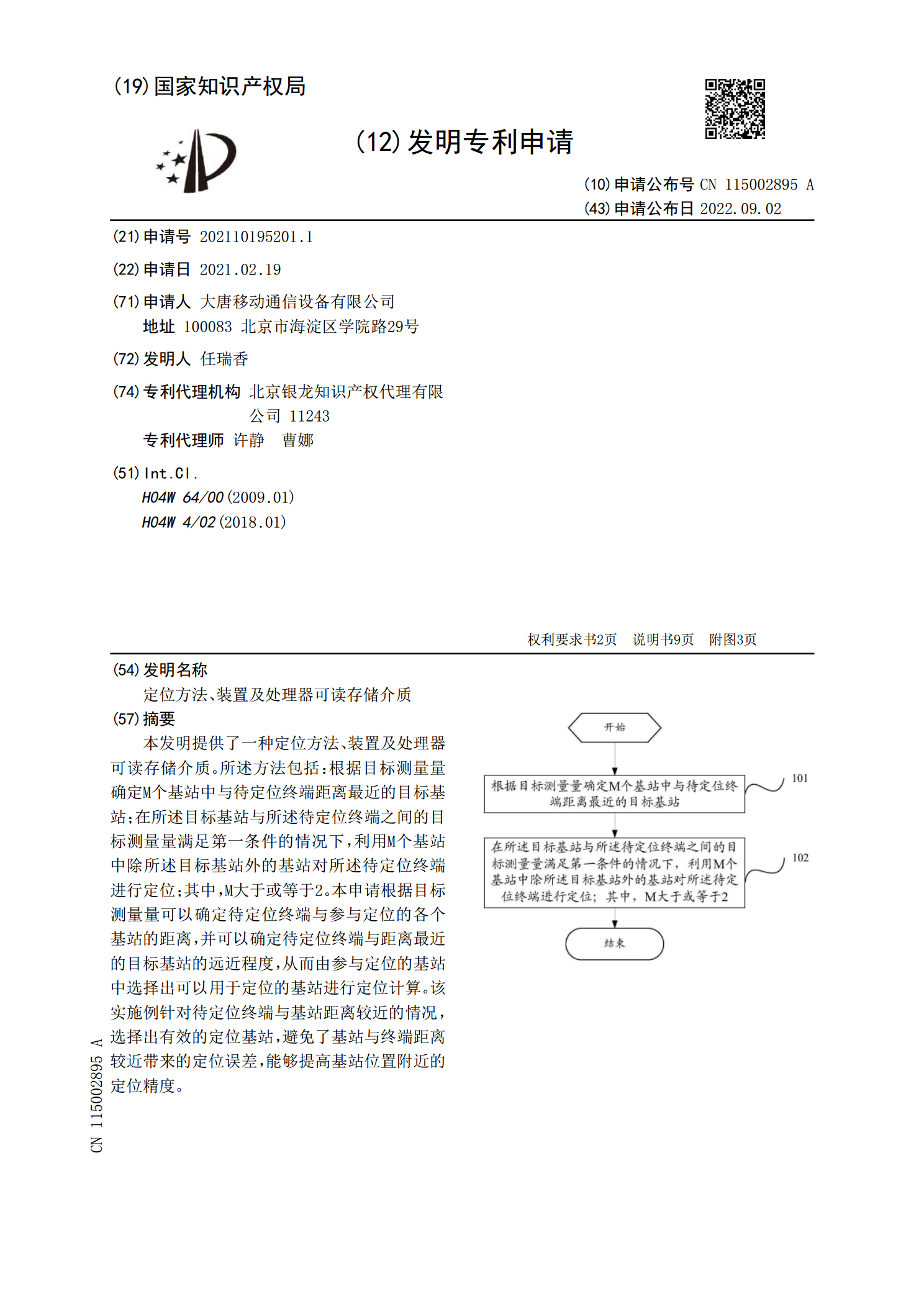
定位方法、装置及处理器可读存储介质.pdf
本发明提供了一种定位方法、装置及处理器可读存储介质。所述方法包括:根据目标测量量确定M个基站中与待定位终端距离最近的目标基站;在所述目标基站与所述待定位终端之间的目标测量量满足第一条件的情况下,利用M个基站中除所述目标基站外的基站对所述待定位终端进行定位;其中,M大于或等于2。本申请根据目标测量量可以确定待定位终端与参与定位的各个基站的距离,并可以确定待定位终端与距离最近的目标基站的远近程度,从而由参与定位的基站中选择出可以用于定位的基站进行定位计算。该实施例针对待定位终端与基站距离较近的情况,选择出有效

用于场景重建的拍摄控制方法、装置及可读存储介质.pdf
本申请涉及一种用于场景重建的拍摄控制方法及装置,包括:对目标场景进行场景重建拍摄,获取每一拍摄点的拍摄信息;按照不同的连通顺序连通所有拍摄点,得到M条候选拍摄路径;对于候选拍摄路径,根据每一拍摄点的拍摄信息,获得对应候选拍摄路径的能耗参数值;根据候选拍摄路径的能耗参数值,获得候选拍摄路径的拍摄能耗,并将拍摄能耗满足设定条件的候选拍摄路径,作为目标拍摄路径。本发明能够基于对拍摄能耗的需求得到一条与需求相吻合的拍摄路径作为最终的目标拍摄路径,使得拍摄能耗便是可控的,使得图像采集工作能够按照预期顺利完成。
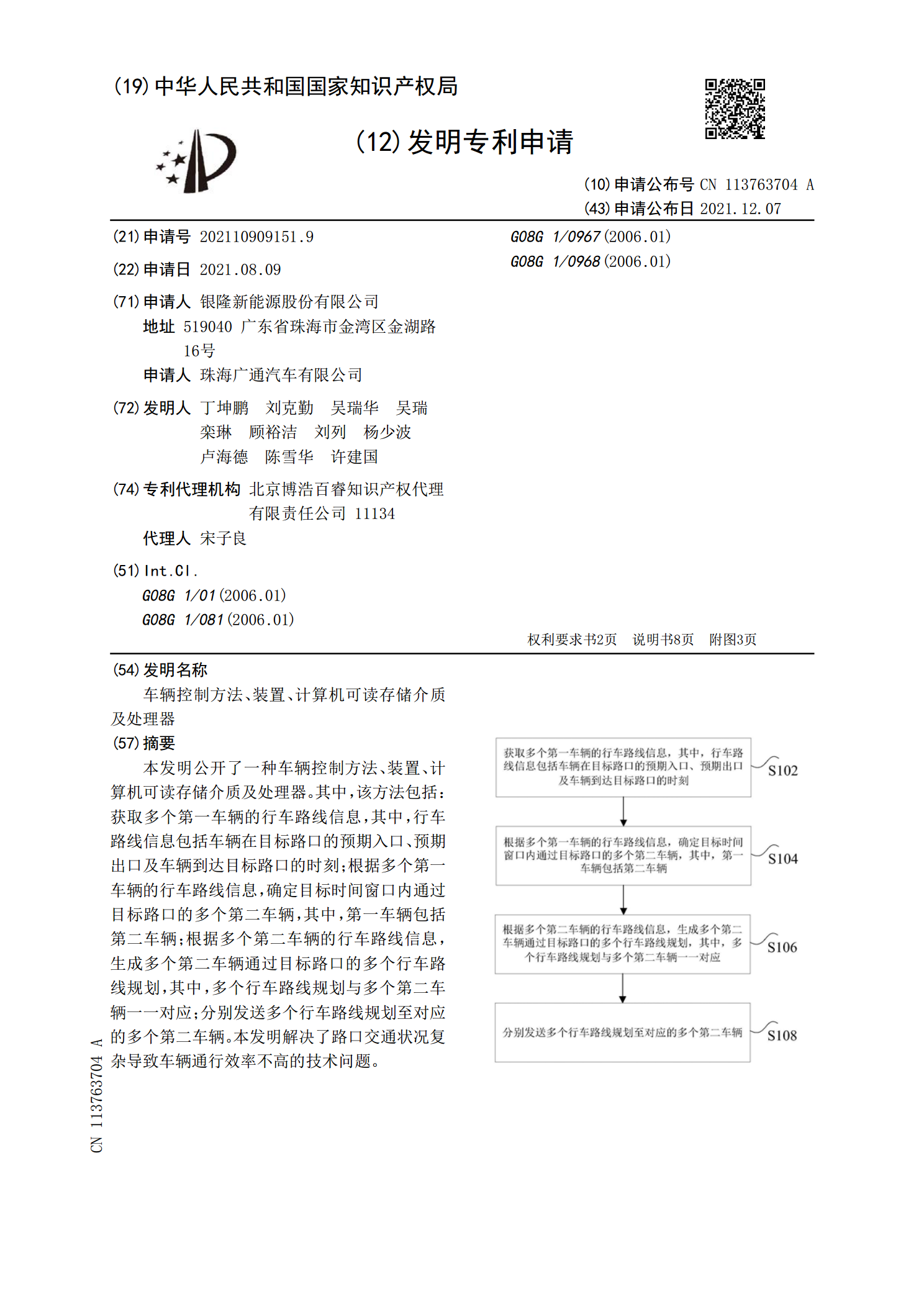
车辆控制方法、装置、计算机可读存储介质及处理器.pdf
本发明公开了一种车辆控制方法、装置、计算机可读存储介质及处理器。其中,该方法包括:获取多个第一车辆的行车路线信息,其中,行车路线信息包括车辆在目标路口的预期入口、预期出口及车辆到达目标路口的时刻;根据多个第一车辆的行车路线信息,确定目标时间窗口内通过目标路口的多个第二车辆,其中,第一车辆包括第二车辆;根据多个第二车辆的行车路线信息,生成多个第二车辆通过目标路口的多个行车路线规划,其中,多个行车路线规划与多个第二车辆一一对应;分别发送多个行车路线规划至对应的多个第二车辆。本发明解决了路口交通状况复杂导致车辆