
一种欠驱动采摘机械手末端执行器及采摘方法.pdf

哲妍****彩妍


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种欠驱动采摘机械手末端执行器及采摘方法.pdf
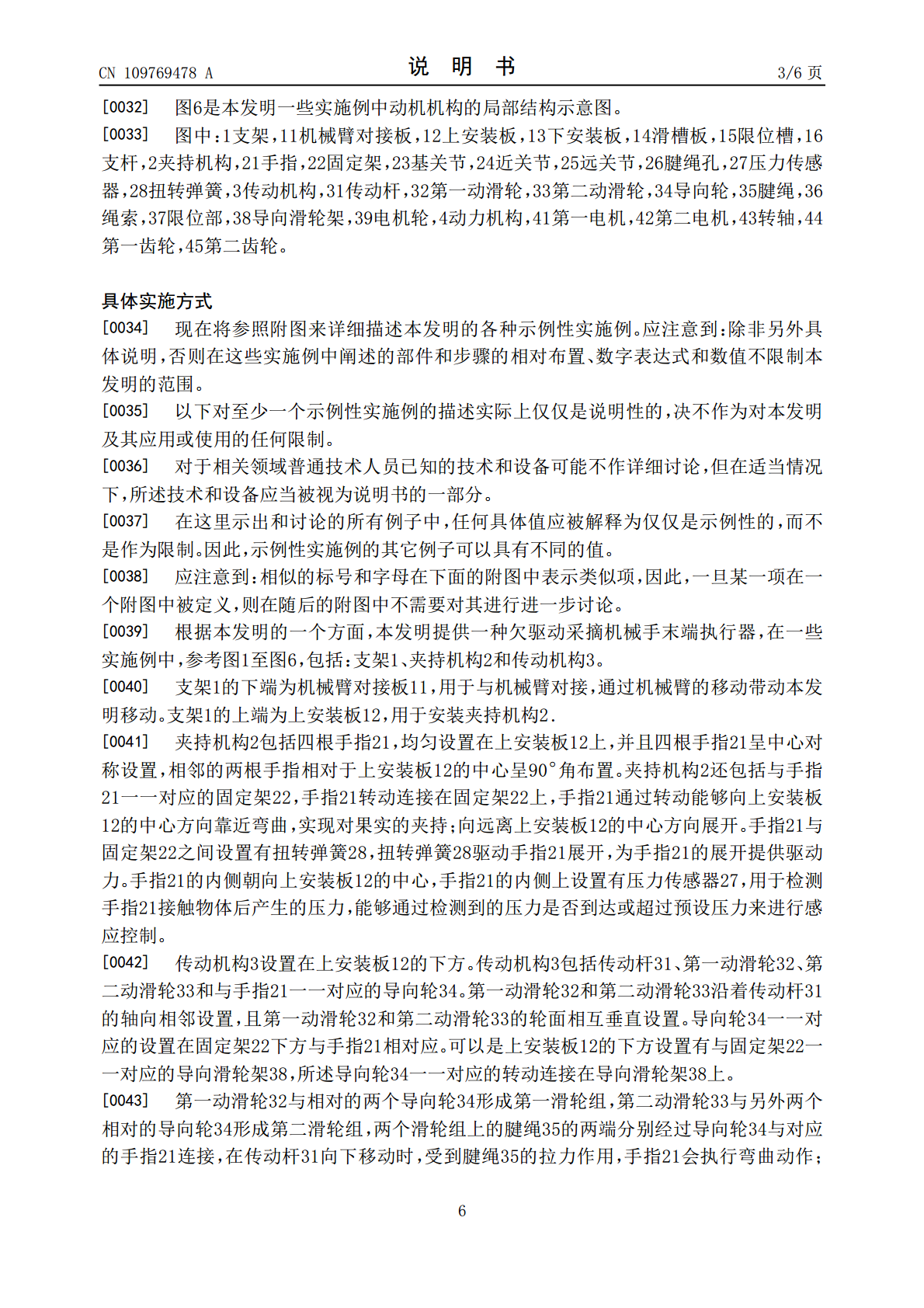
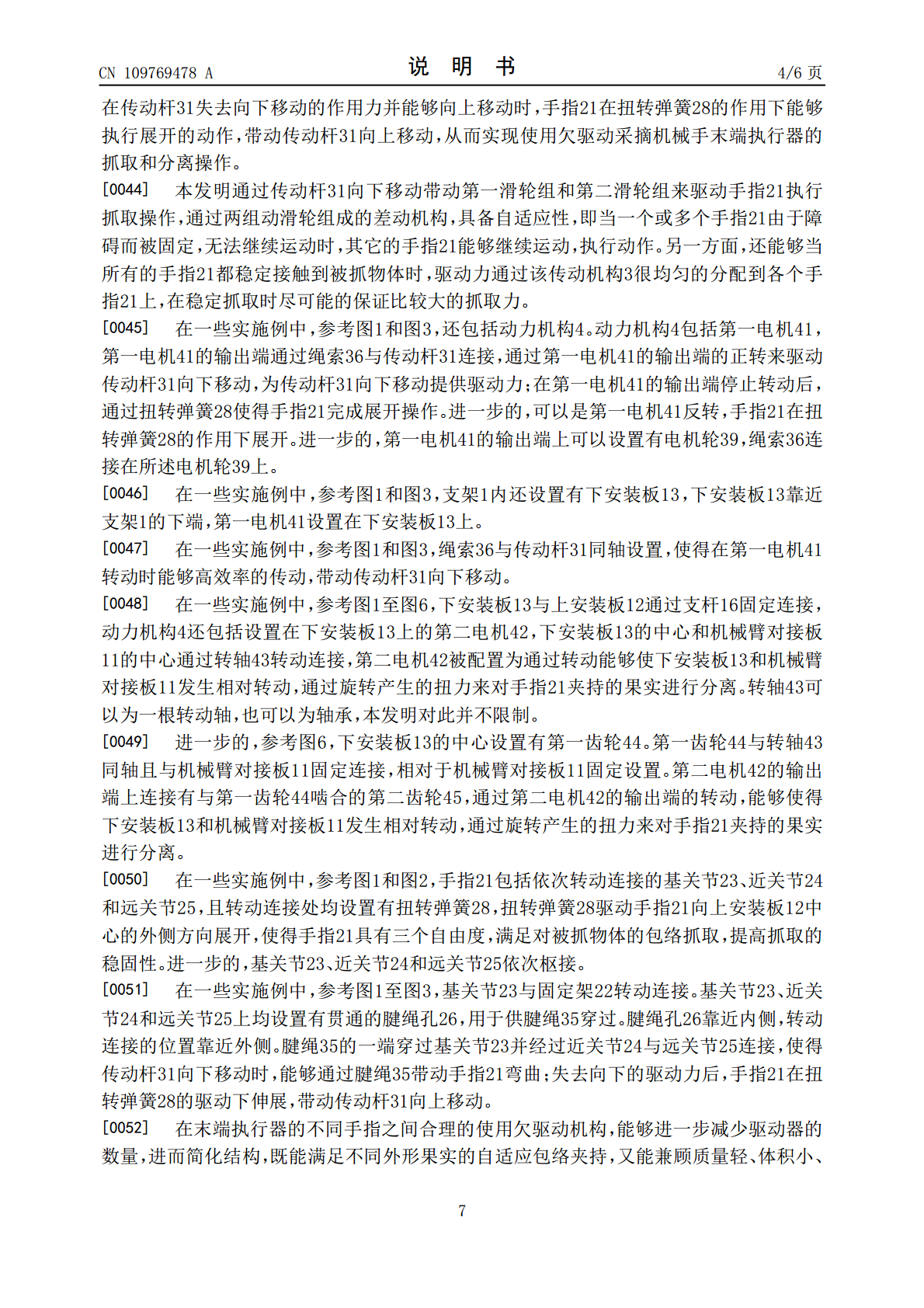
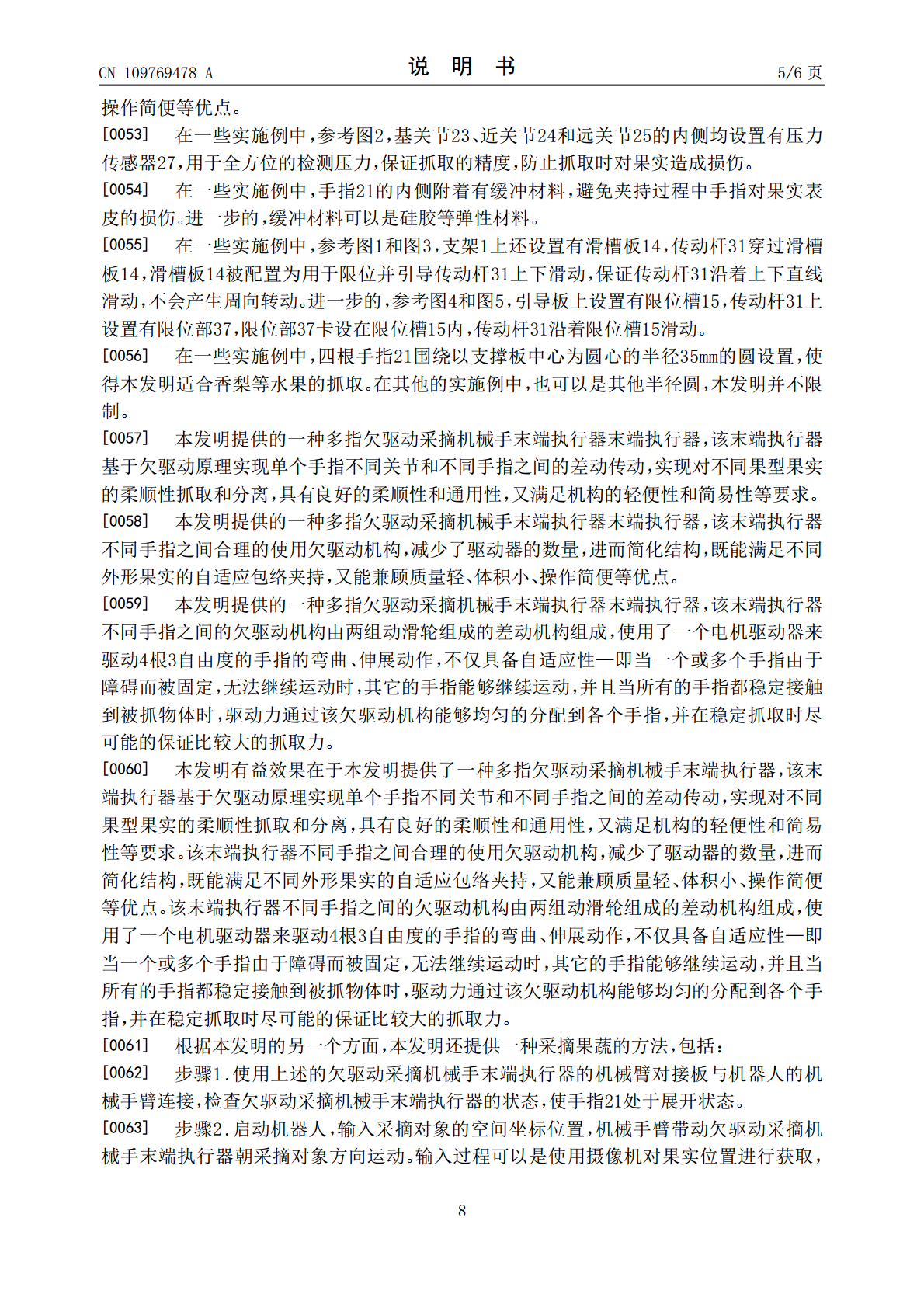
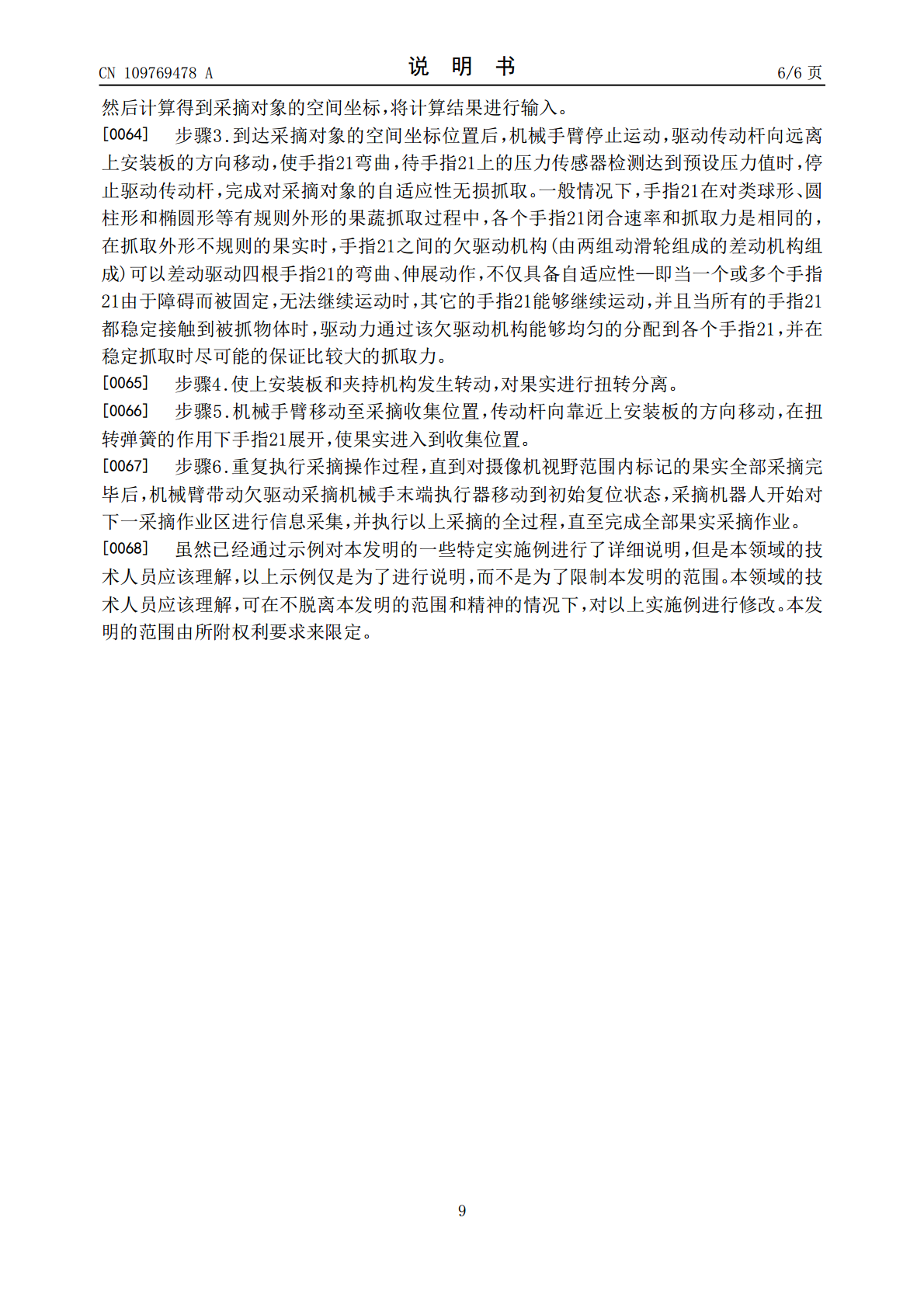
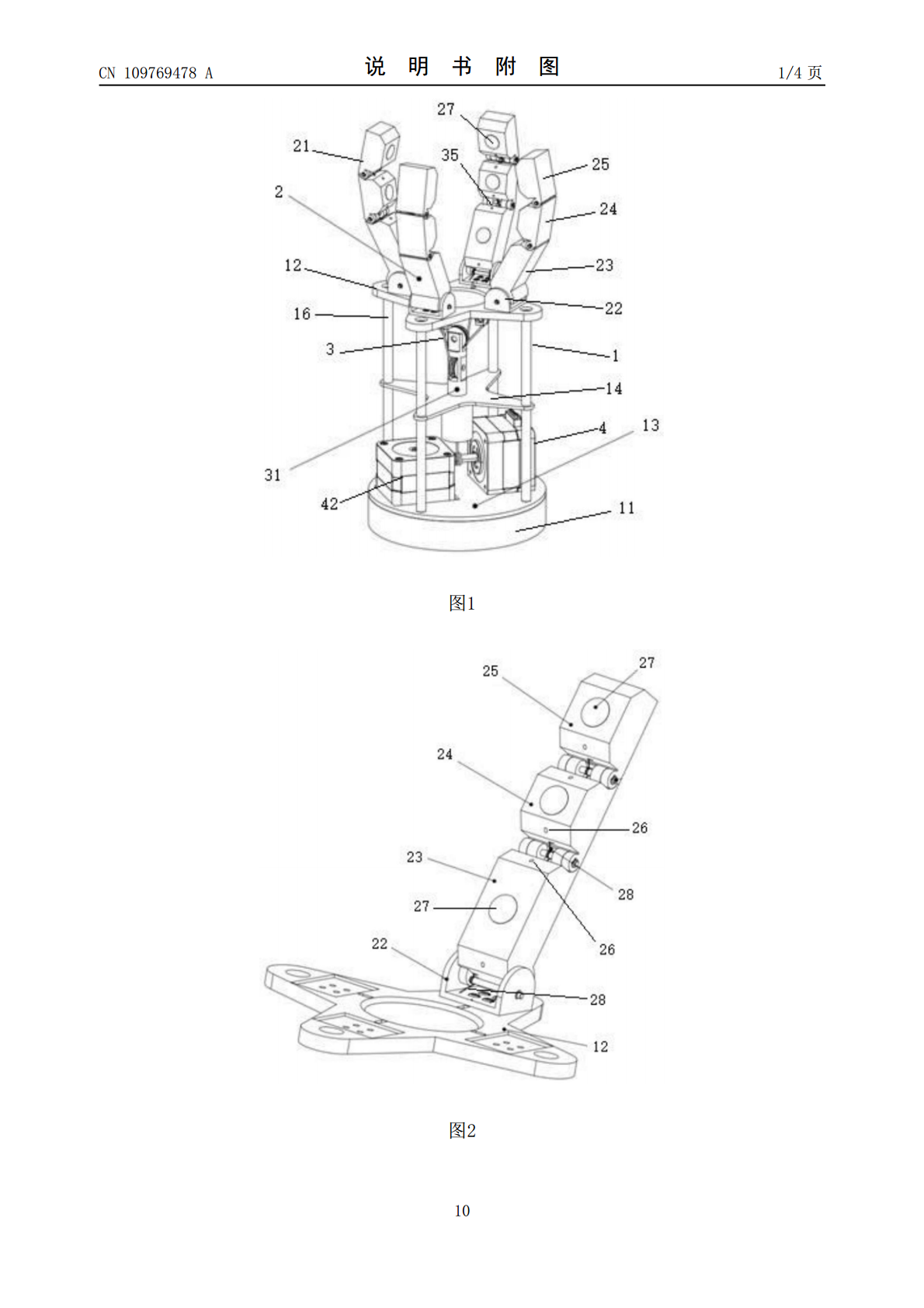
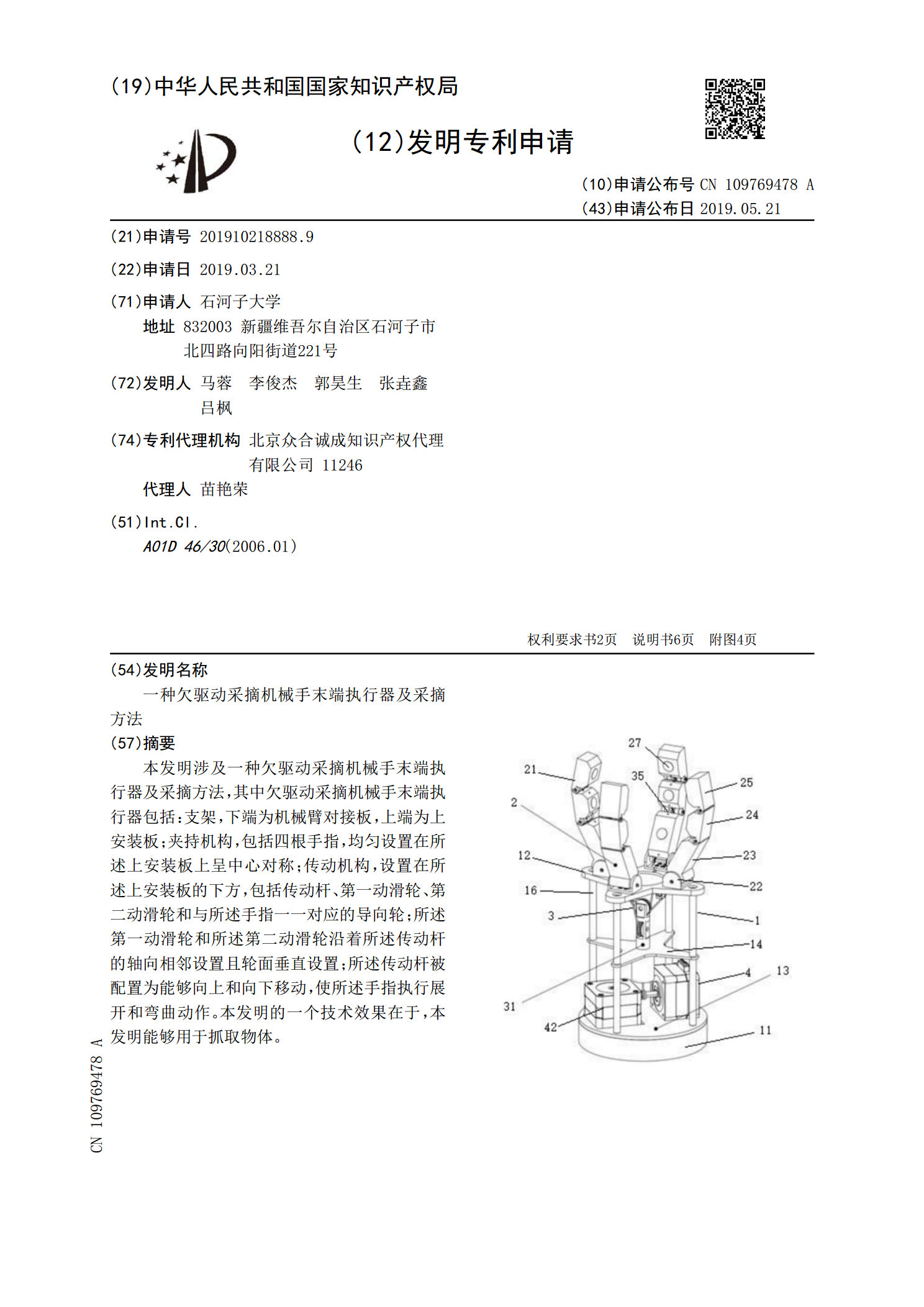
本发明涉及一种欠驱动采摘机械手末端执行器及采摘方法,其中欠驱动采摘机械手末端执行器包括:支架,下端为机械臂对接板,上端为上安装板;夹持机构,包括四根手指,均匀设置在所述上安装板上呈中心对称;传动机构,设置在所述上安装板的下方,包括传动杆、第一动滑轮、第二动滑轮和与所述手指一一对应的导向轮;所述第一动滑轮和所述第二动滑轮沿着所述传动杆的轴向相邻设置且轮面垂直设置;所述传动杆被配置为能够向上和向下移动,使所述手指执行展开和弯曲动作。本发明的一个技术效果在于,本发明能够用于抓取物体。

欠驱动采摘机械手末端执行器装置.pdf
本发明公开了一种欠驱动采摘机械手末端执行器装置。包括结构相同的三个手指,传动机构,三块接触板,三根连杆,驱动杆和转动盘;每个手指具有三个关节,手指第一关节的一端均匀安装在转动盘上,每个手指都装有接触板。具体工作原理是:驱动杆在电机的驱动下移动,通过连杆带动3个手指相向运动闭拢,当手指上的接触板接触到果蔬时,果蔬会推动接触板滑动,驱动手指第二关节内部不完全齿轮运动,与之啮合的齿轮带动手指第三关节运动,接触板表面的力传感器测试到预定的抓取力时,将信号反馈给电机,控制驱动杆停止移动,电机再驱动转动盘转动,实现果
一种欠驱动苹果采摘末端机械手.pdf
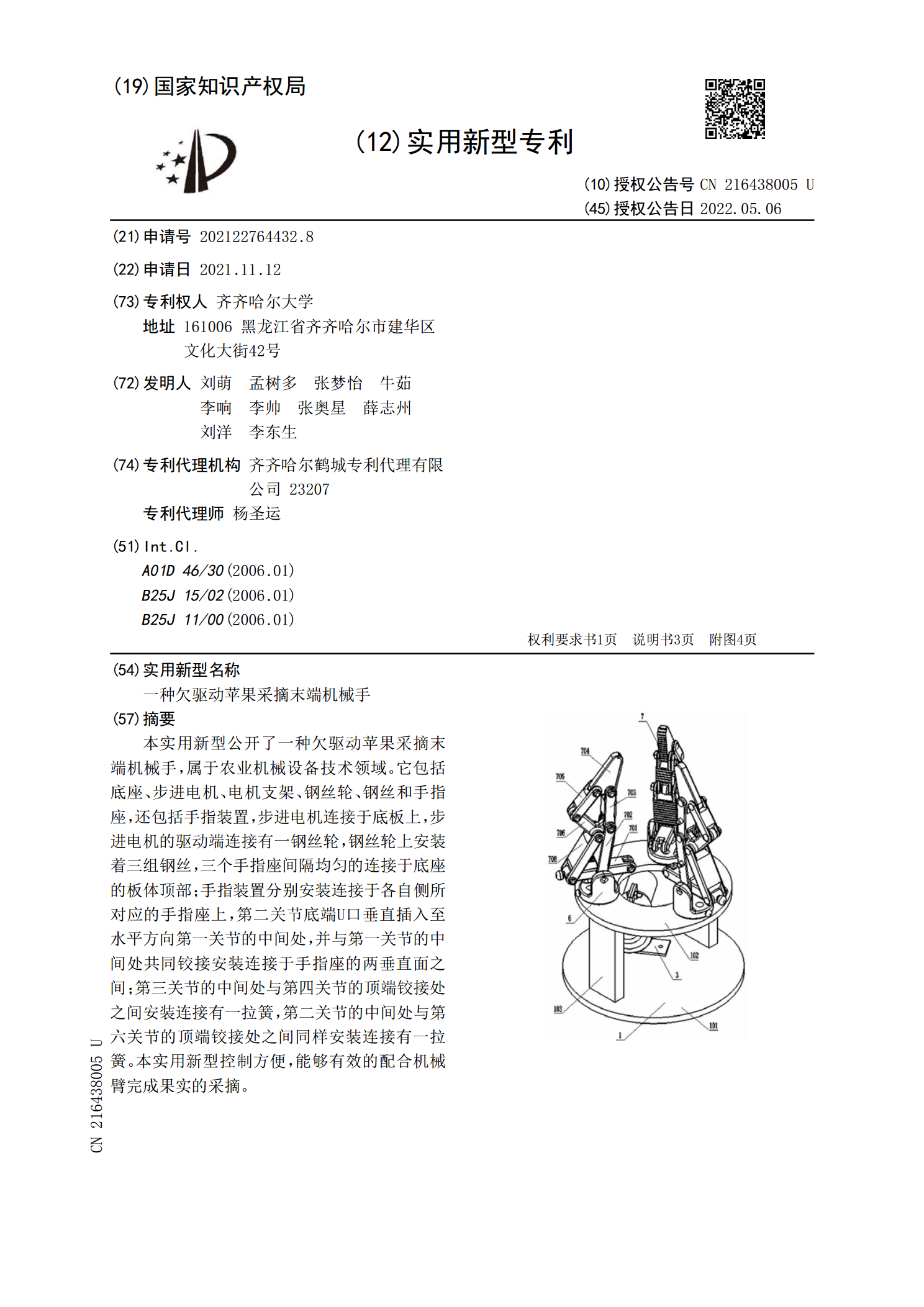
本实用新型公开了一种欠驱动苹果采摘末端机械手,属于农业机械设备技术领域。它包括底座、步进电机、电机支架、钢丝轮、钢丝和手指座,还包括手指装置,步进电机连接于底板上,步进电机的驱动端连接有一钢丝轮,钢丝轮上安装着三组钢丝,三个手指座间隔均匀的连接于底座的板体顶部;手指装置分别安装连接于各自侧所对应的手指座上,第二关节底端U口垂直插入至水平方向第一关节的中间处,并与第一关节的中间处共同铰接安装连接于手指座的两垂直面之间;第三关节的中间处与第四关节的顶端铰接处之间安装连接有一拉簧,第二关节的中间处与第六关节的顶

欠驱动苹果采摘末端执行器研究和设计的综述报告.docx
欠驱动苹果采摘末端执行器研究和设计的综述报告近年来,随着农业技术的不断发展,智能农业逐渐成为农业发展的主流趋势。其中,苹果采摘机器人得到了广泛的关注和研究。末端执行器是机器人中不可或缺的组成部分,是机器人与目标物体进行交互的部分,苹果采摘末端执行器的研究和设计对于提高苹果采摘机器人的采摘效率和准确度具有重要意义。1.欠驱动末端执行器的概念和特点欠驱动末端执行器是机器人末端执行器类型之一,也称为柔性机构。相比较传统末端执行器,欠驱动末端执行器具有柔性变形、可重构性、轻量化和成本低等特点。欠驱动末端执行器一般
一种采摘机械手末端执行器.pdf
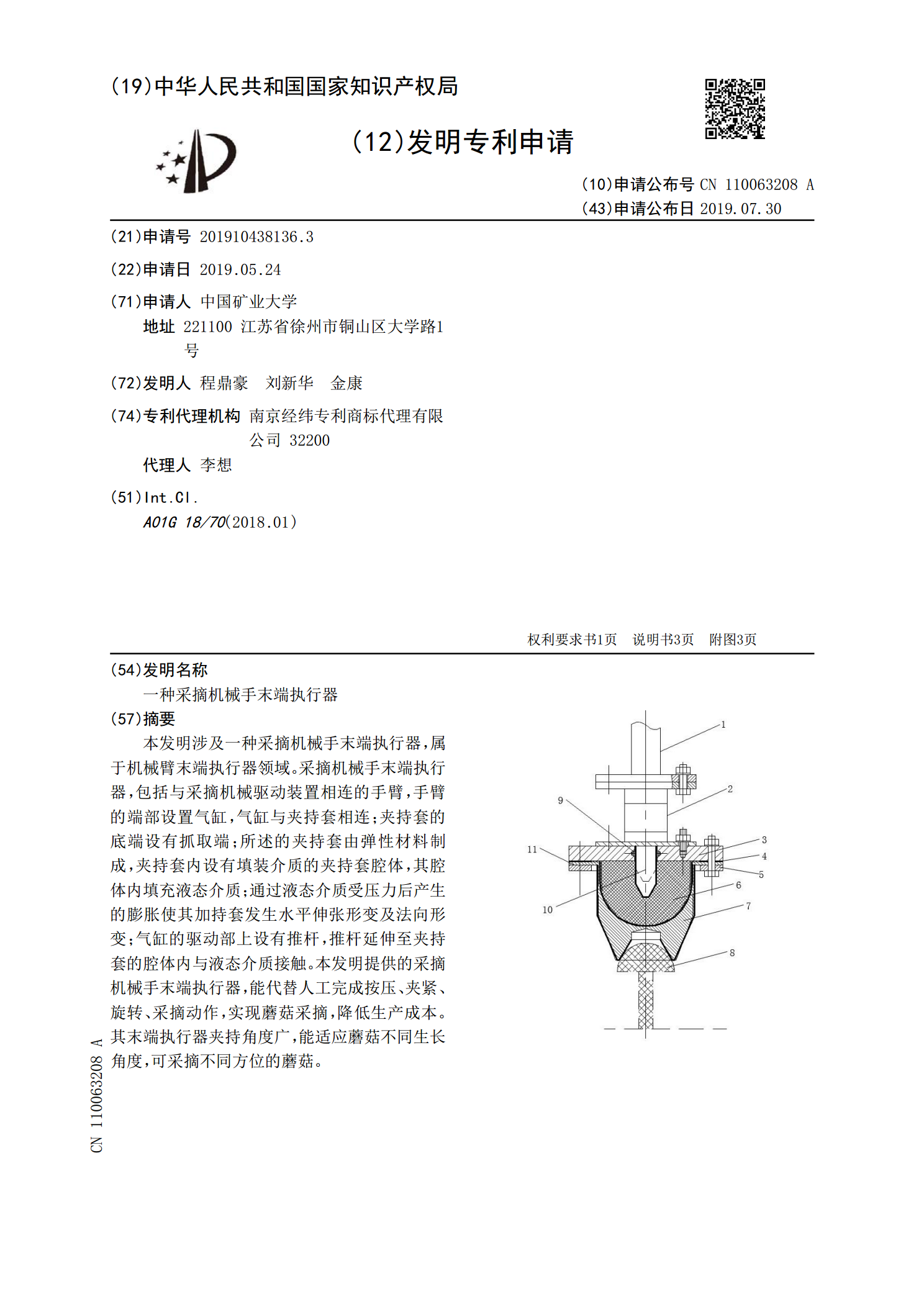
本发明涉及一种采摘机械手末端执行器,属于机械臂末端执行器领域。采摘机械手末端执行器,包括与采摘机械驱动装置相连的手臂,手臂的端部设置气缸,气缸与夹持套相连;夹持套的底端设有抓取端;所述的夹持套由弹性材料制成,夹持套内设有填装介质的夹持套腔体,其腔体内填充液态介质;通过液态介质受压力后产生的膨胀使其加持套发生水平伸张形变及法向形变;气缸的驱动部上设有推杆,推杆延伸至夹持套的腔体内与液态介质接触。本发明提供的采摘机械手末端执行器,能代替人工完成按压、夹紧、旋转、采摘动作,实现蘑菇采摘,降低生产成本。其末端执行