
一种多状态调节无人车.pdf

雨巷****凝海

1/9
2/9
3/9
4/9
5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多状态调节无人车.pdf
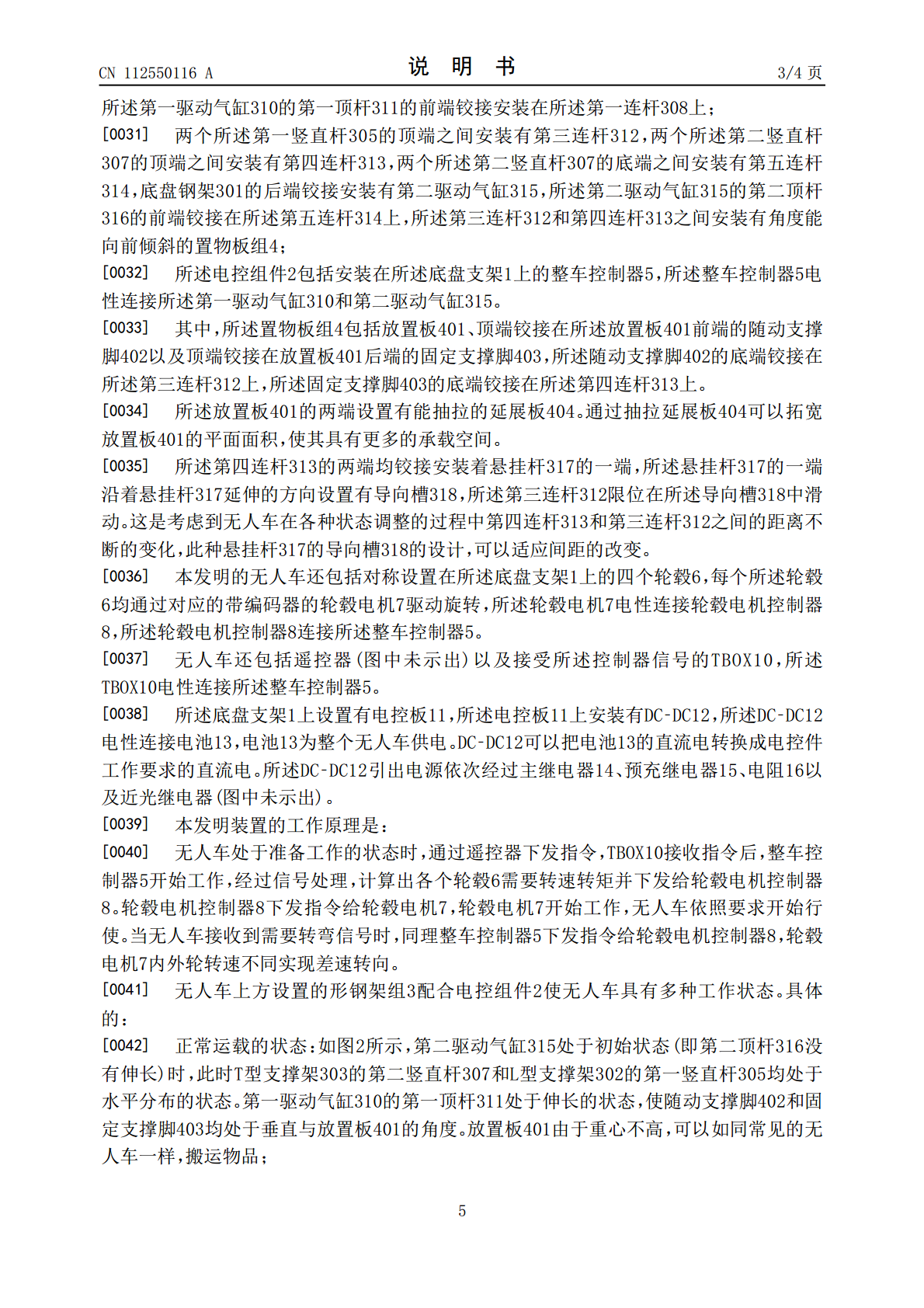
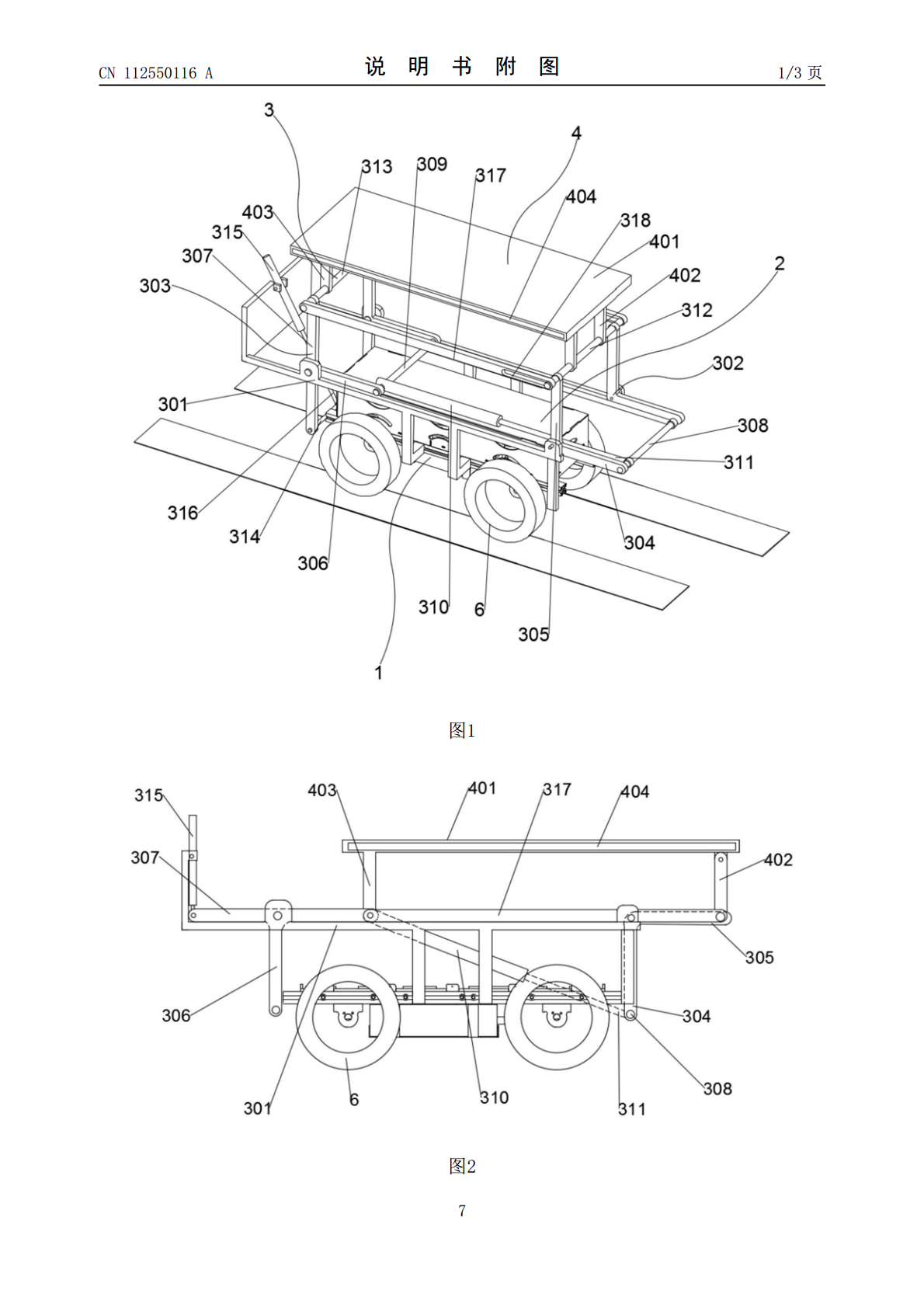
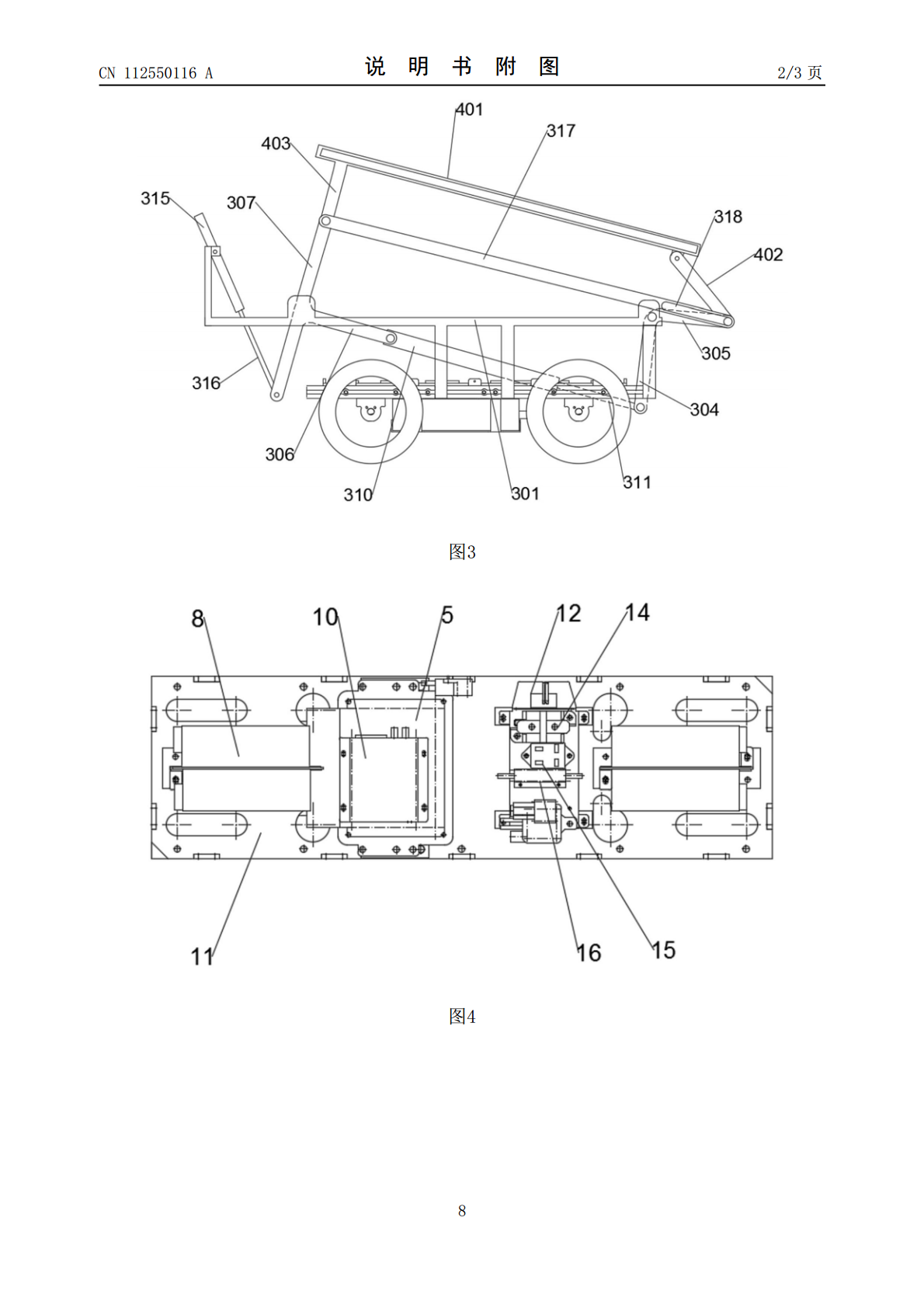
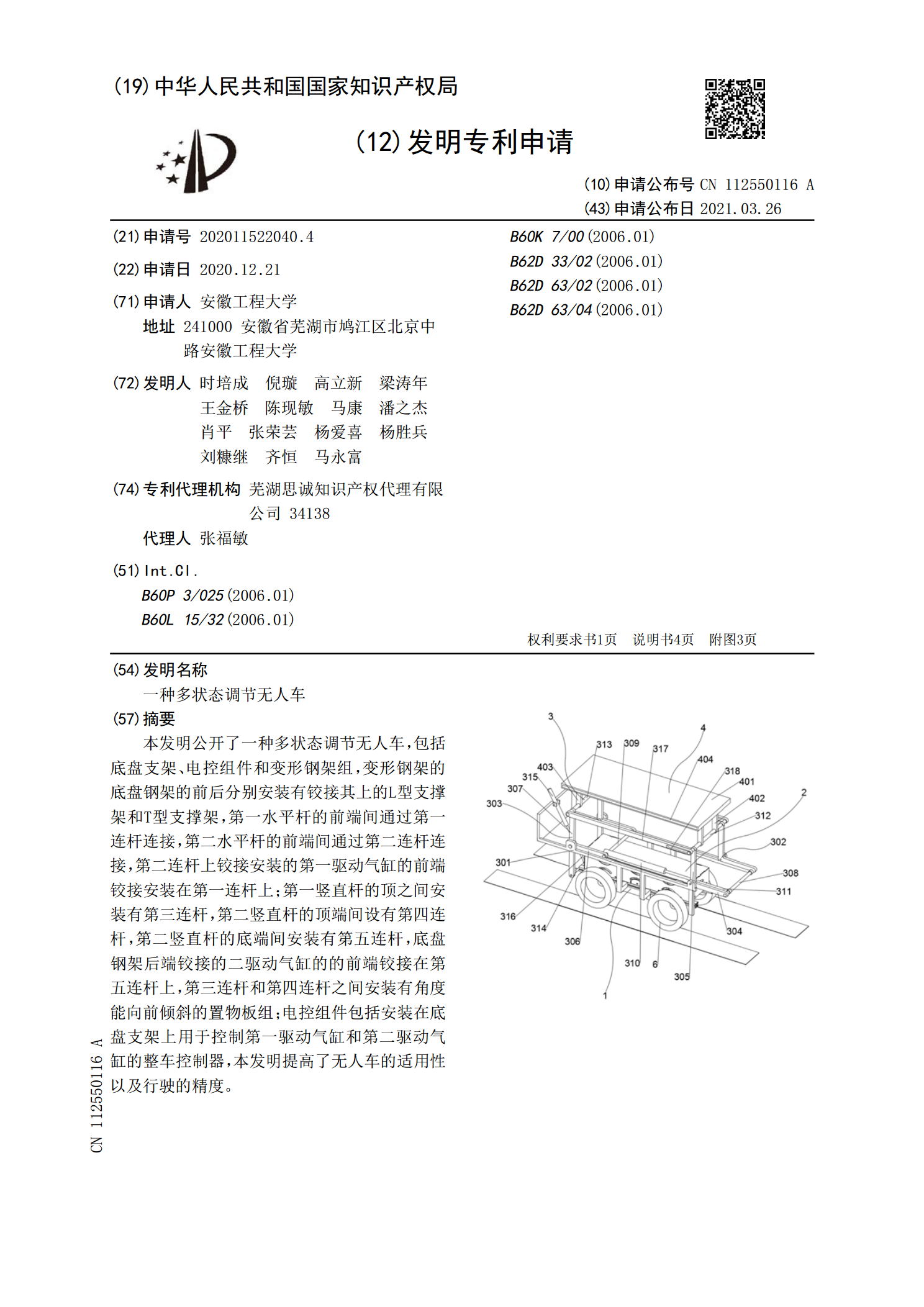
本发明公开了一种多状态调节无人车,包括底盘支架、电控组件和变形钢架组,变形钢架的底盘钢架的前后分别安装有铰接其上的L型支撑架和T型支撑架,第一水平杆的前端间通过第一连杆连接,第二水平杆的前端间通过第二连杆连接,第二连杆上铰接安装的第一驱动气缸的前端铰接安装在第一连杆上;第一竖直杆的顶之间安装有第三连杆,第二竖直杆的顶端间设有第四连杆,第二竖直杆的底端间安装有第五连杆,底盘钢架后端铰接的二驱动气缸的的前端铰接在第五连杆上,第三连杆和第四连杆之间安装有角度能向前倾斜的置物板组;电控组件包括安装在底盘支架上用于

无人车感知系统的位置调节方法、装置、系统及无人车.pdf
本发明实施例提供一种无人车感知系统的位置调节方法、装置、系统及无人车,属于无人车领域。所述无人车感知系统包括多个传感器,所述多个传感器包括位于所述无人车车顶的车顶传感器和位于所述无人车四周的四周传感器,所述方法包括:获取所述无人车感知系统所感知的当前路面环境信息;根据所述当前路面环境信息分析是否需要对所述多个传感器中的特定传感器的位置进行调节;以及在需要对特定传感器的位置进行调节的情况下,对所述特定传感器的位置进行调节。通过分析自动调节传感器位置,进而可以控制传感器自动躲避车辆周围或前方的障碍物。

无人车感知系统的位置调节装置、系统及无人车.pdf
本发明实施例提供一种无人车感知系统的位置调节装置、系统及无人车,属于无人车领域。所述无人车感知系统包括多个传感器,所述多个传感器包括位于所述无人车车顶的车顶传感器和位于所述无人车四周的四周传感器,所述位置调节装置包括:获取模块,用于获取所述无人车感知系统所感知的当前路面环境信息;分析模块,用于根据所述当前路面环境信息分析是否需要对所述多个传感器中的特定传感器的位置进行调节;以及调节模块,用于在需要对所述特定传感器的位置进行调节的情况下,对所述特定传感器的位置进行调节。
一种多旋翼无人机状态监测装置.pdf
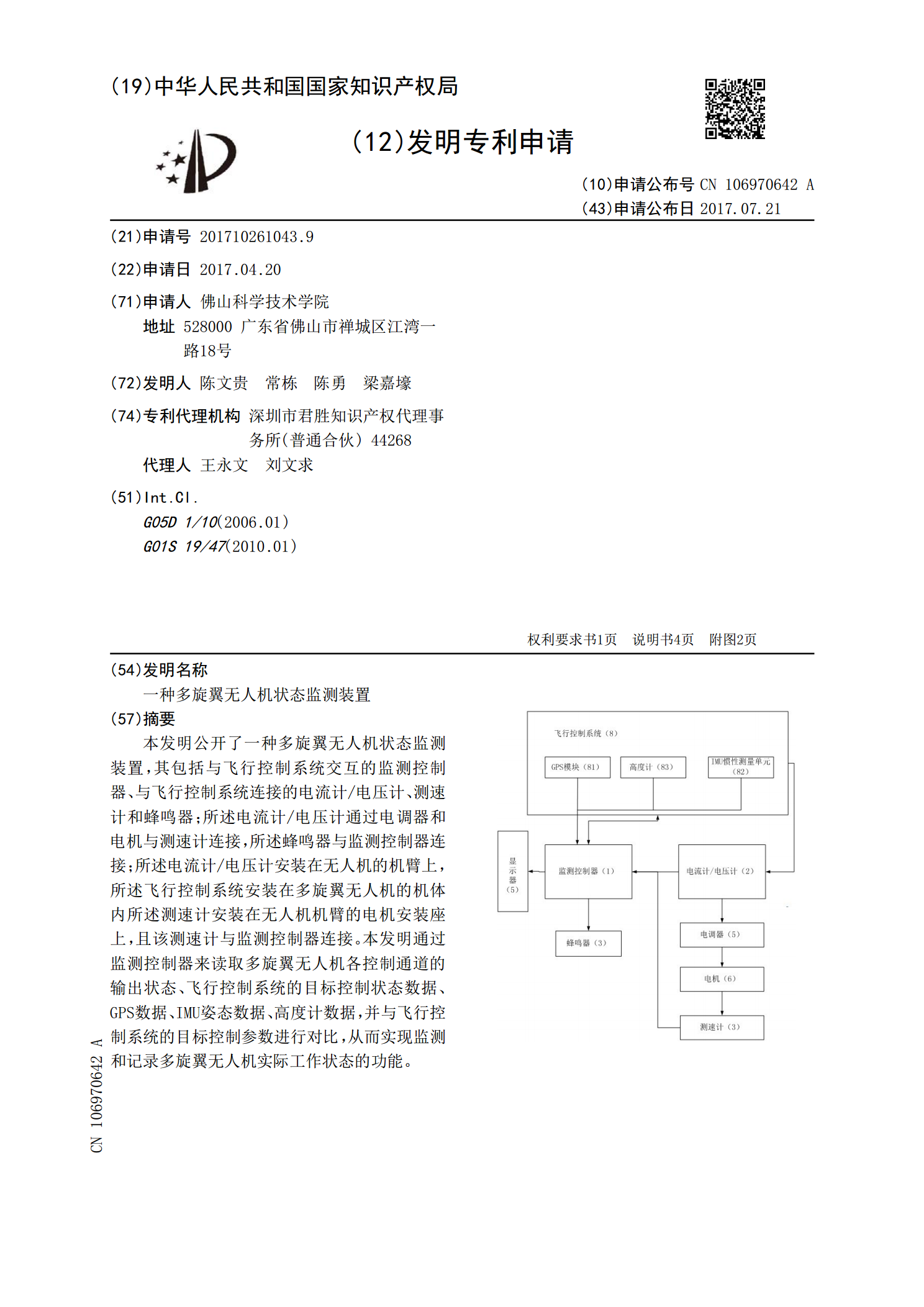
本发明公开了一种多旋翼无人机状态监测装置,其包括与飞行控制系统交互的监测控制器、与飞行控制系统连接的电流计/电压计、测速计和蜂鸣器;所述电流计/电压计通过电调器和电机与测速计连接,所述蜂鸣器与监测控制器连接;所述电流计/电压计安装在无人机的机臂上,所述飞行控制系统安装在多旋翼无人机的机体内所述测速计安装在无人机机臂的电机安装座上,且该测速计与监测控制器连接。本发明通过监测控制器来读取多旋翼无人机各控制通道的输出状态、飞行控制系统的目标控制状态数据、GPS数据、IMU姿态数据、高度计数据,并与飞行控制系统的

一种无人清扫车的自适应贴边调节方法及调节系统.pdf
本发明公开了一种无人清扫车的自适应贴边调节方法及调节系统,方法包括:步骤S1:获取无人清扫车的一侧扫刷外边缘与道路边线或路沿的图像;步骤S2:灰度处理,检测边缘,提取边缘轮廓,形成灰度矩阵;步骤S3:分类二者轮廓,并聚类获得对应轮廓簇点,快速循环遍历并计算两轮廓内像素簇点之间的距离最小值,得到最小距离偏差值,将像素簇点最小距离转化为实际工程偏差距离参数;步骤S4:如若距离稳定偏差值为0则直接退出,重新进行实时检测;否则,输出到控制模块,对原行驶规划路径进行偏移补偿或对扫刷的展开角度进行自动调节,实现自适应