
一种无人清扫车的自适应贴边调节方法及调节系统.pdf

猫巷****永安

1/10
2/10
3/10
4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种无人清扫车的自适应贴边调节方法及调节系统.pdf
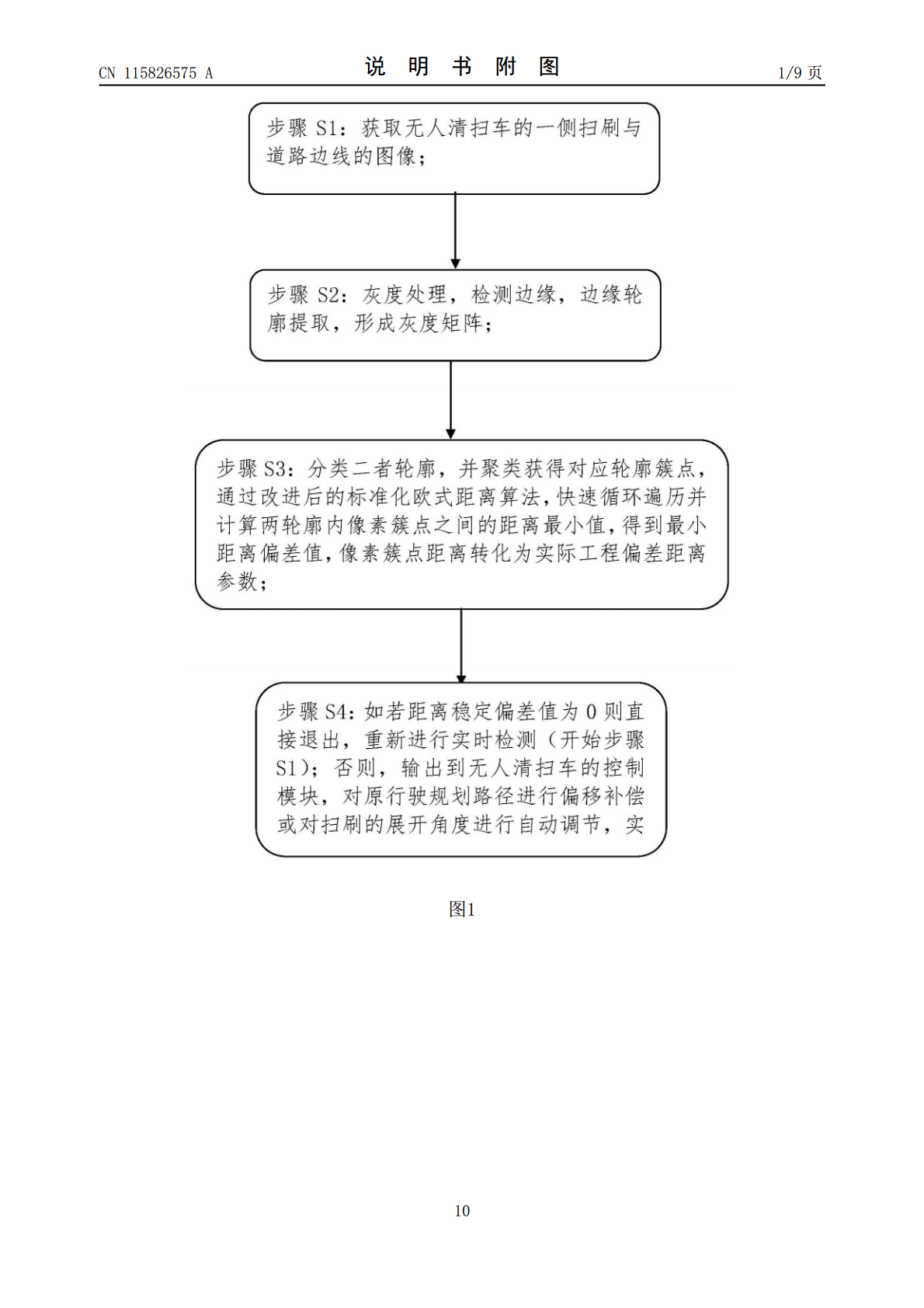
本发明公开了一种无人清扫车的自适应贴边调节方法及调节系统,方法包括:步骤S1:获取无人清扫车的一侧扫刷外边缘与道路边线或路沿的图像;步骤S2:灰度处理,检测边缘,提取边缘轮廓,形成灰度矩阵;步骤S3:分类二者轮廓,并聚类获得对应轮廓簇点,快速循环遍历并计算两轮廓内像素簇点之间的距离最小值,得到最小距离偏差值,将像素簇点最小距离转化为实际工程偏差距离参数;步骤S4:如若距离稳定偏差值为0则直接退出,重新进行实时检测;否则,输出到控制模块,对原行驶规划路径进行偏移补偿或对扫刷的展开角度进行自动调节,实现自适应

一种自适应舒适性气囊调节系统、调节座椅及调节方法.pdf
本发明涉及一种自适应舒适性气囊调节系统、调节座椅及调节方法,该调节系统包括第一中部调节气垫、第一侧翼调节气垫、第二中部调节气垫、第二侧翼调节气垫、第一压力检测垫、第二压力检测垫、检测垫控制器、调节气路组件、气泵、气垫控制器;第一中部调节气垫布置在座椅靠背的中间区域,第一侧翼调节气垫布置在座椅靠背的侧翼区域;第二中部调节气垫布置在座椅座垫的中间区域,第二侧翼调节气垫布置在座椅座垫的侧翼区域;第一压力检测垫用于检测靠背的压力分布,第二压力检测垫用于检测坐垫的压力分布。该调节系统通过柔性的压力检测垫实时反馈压力

自适应绳索张紧力调节系统及调节方法.pdf
本发明提供了自适应绳索张紧力调节系统,包括至少3个定位点,其中,两个定位点分别设有绳头连接组件,其余至少一个定位点设有张紧轮组件,绳索两端分别与绳头连接组件固联,所述绳索通过张紧轮组件;所述张紧轮组件包括弹性伸缩组件,所述弹性伸缩组件端部设有绳轮。本发明能够利用张紧轮组件随温度变化自动、即时的调整传动路径长度,有效起到补偿绳索张紧力变化的作用,保持绳索张紧力稳定在合理范围内,可解决太空环境温度变化造成绳索断裂或松弛的问题;利用调整螺栓与连接支架的螺纹配合长度,在绳索压接后长度无法改变的情况下,仍可精准调整

无人车感知系统的位置调节方法、装置、系统及无人车.pdf
本发明实施例提供一种无人车感知系统的位置调节方法、装置、系统及无人车,属于无人车领域。所述无人车感知系统包括多个传感器,所述多个传感器包括位于所述无人车车顶的车顶传感器和位于所述无人车四周的四周传感器,所述方法包括:获取所述无人车感知系统所感知的当前路面环境信息;根据所述当前路面环境信息分析是否需要对所述多个传感器中的特定传感器的位置进行调节;以及在需要对特定传感器的位置进行调节的情况下,对所述特定传感器的位置进行调节。通过分析自动调节传感器位置,进而可以控制传感器自动躲避车辆周围或前方的障碍物。
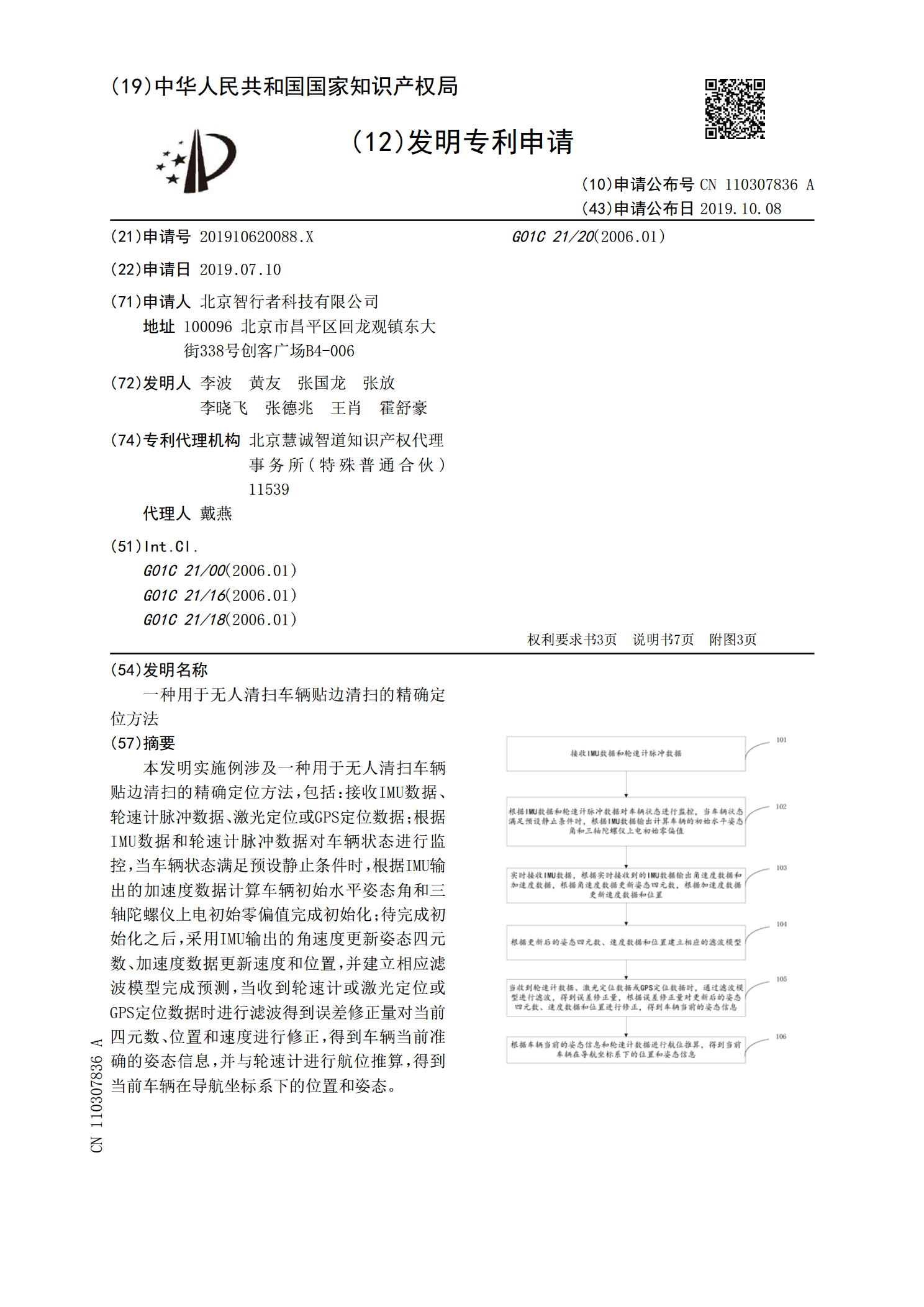
一种用于无人清扫车辆贴边清扫的精确定位方法.pdf
本发明实施例涉及一种用于无人清扫车辆贴边清扫的精确定位方法,包括:接收IMU数据、轮速计脉冲数据、激光定位或GPS定位数据;根据IMU数据和轮速计脉冲数据对车辆状态进行监控,当车辆状态满足预设静止条件时,根据IMU输出的加速度数据计算车辆初始水平姿态角和三轴陀螺仪上电初始零偏值完成初始化;待完成初始化之后,采用IMU输出的角速度更新姿态四元数、加速度数据更新速度和位置,并建立相应滤波模型完成预测,当收到轮速计或激光定位或GPS定位数据时进行滤波得到误差修正量对当前四元数、位置和速度进行修正,得到车辆当前准