
一种同步带张紧力调节装置和机器人同步带传动机构.pdf

猫巷****雪凝

1/10
2/10
3/10

4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种同步带张紧力调节装置和机器人同步带传动机构.pdf
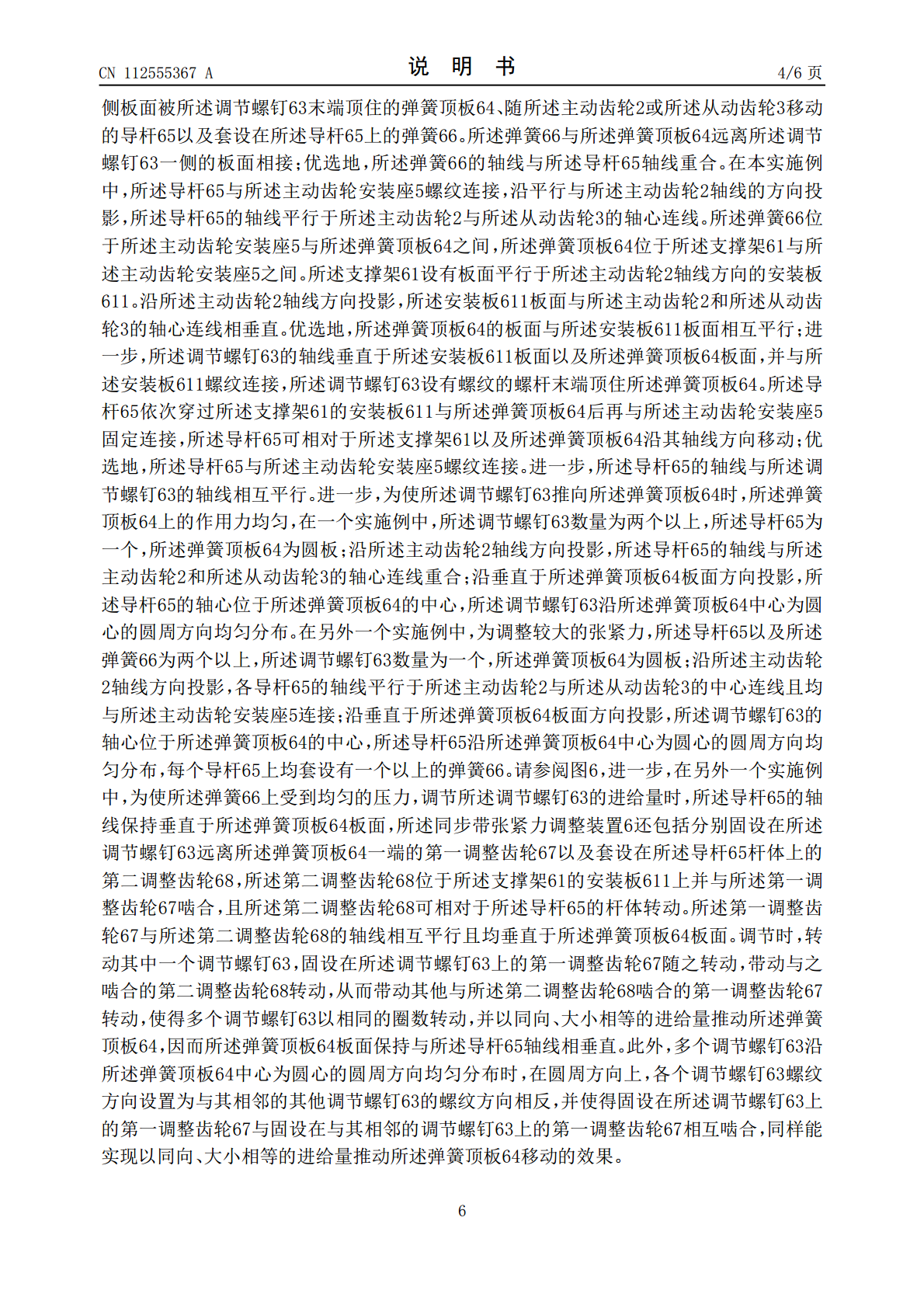
一种同步带张紧力调整装置,包括调节螺钉、用于安装所述调节螺钉的支撑架、一侧板面被所述调节螺钉末端顶住的弹簧顶板、依次穿过所述支撑架和所述弹簧顶板的导杆以及套设在所述导杆上的弹簧;所述弹簧位于所述弹簧顶板远离所述调节螺钉一侧的板面上,且所述弹簧顶板位于所述弹簧与所述支撑架之间。此外,本发明提供一种使用所述同步带张紧力调整装置的机器人同步带传动机构。与现有技术相比较,本发明的同步带张紧力调整装置和机器人同步带传动机构通过调节螺钉压向弹簧顶板并调节弹簧的压缩量,由弹簧的弹力控制与之平衡的张紧力的大小,实现一步到
一种同步带传动张紧用调节装置.pdf
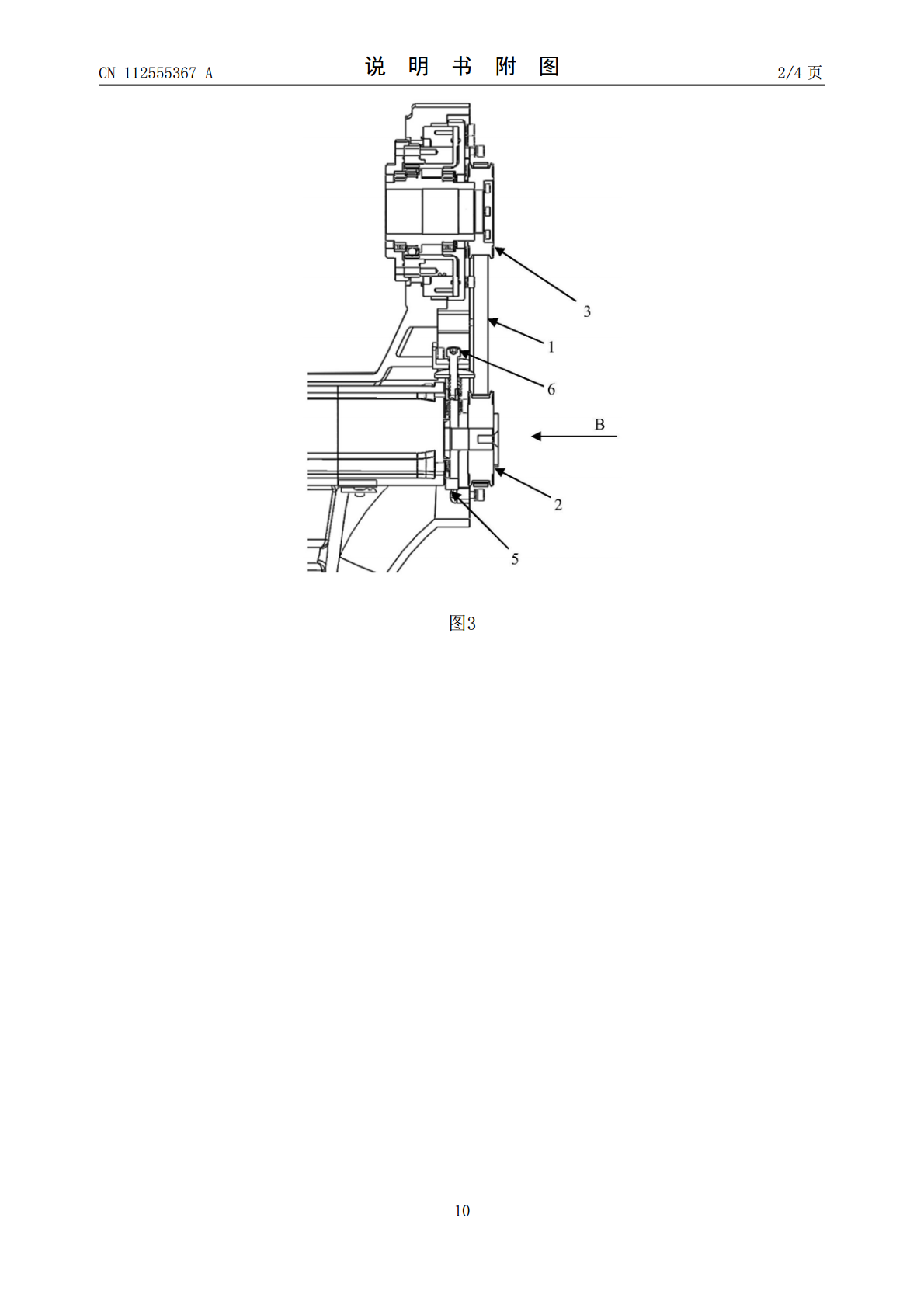
本发明公开了一种同步带传动张紧用调节装置,包括安装架,安装架上设有调节槽,安装架的前部上设有凸片,凸片的外侧壁位置设有锁块,锁块上设有锁槽,凸片上设有锁孔,锁孔与锁槽对接,凸片与锁块通过锁销连接,锁销插入锁孔与锁槽;安装架的两侧上设有安装块,安装块之间设有对接轴,对接轴的外周面套装有张紧调节轮,张紧调节轮设置在调节槽位置,安装块设置在锁块的外侧壁位置,锁块锁接住安装块;安装块的外侧壁位置设有第一对接壳,锁块的外侧壁设有卡槽,锁块通过卡槽卡接在第一对接壳的外侧壁位置。本发明方便对张紧调节轮进行套装安装,通过
同步带张紧传动总成.pdf
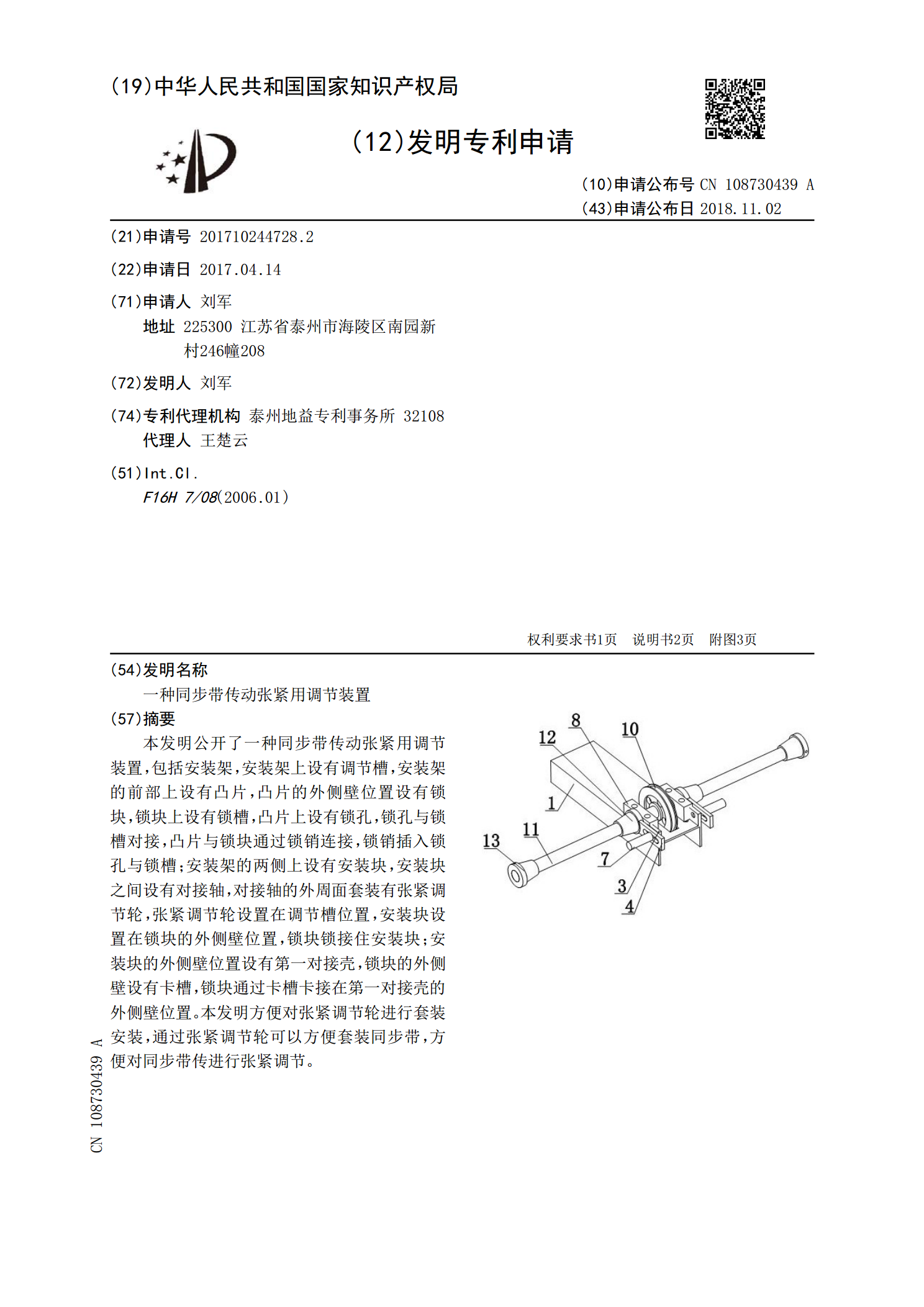
本发明公开了一种同步带张紧传动总成,包括集成在板架上的电机减速器、驱动带轮、导向轮和张紧轮,电机减速器设于板架后侧,电机减速器的输出轴向前穿过竖直板体;驱动带轮于竖直板体前侧安装于电机减速器的输出轴上;导向轮于驱动带轮的左侧或右侧固装于竖直板体的前侧面上;张紧轮于驱动带轮和导向轮之间的上方或下方并通过位置调节机构安装于竖直板体的前侧面上,位置调节机构通过上、下向或左、右向调节张紧轮位置而张紧连接在驱动带轮和导向轮之间的同步带。本发明节省了空间,提高了设计和制造效率。
同步带张紧装置.pdf
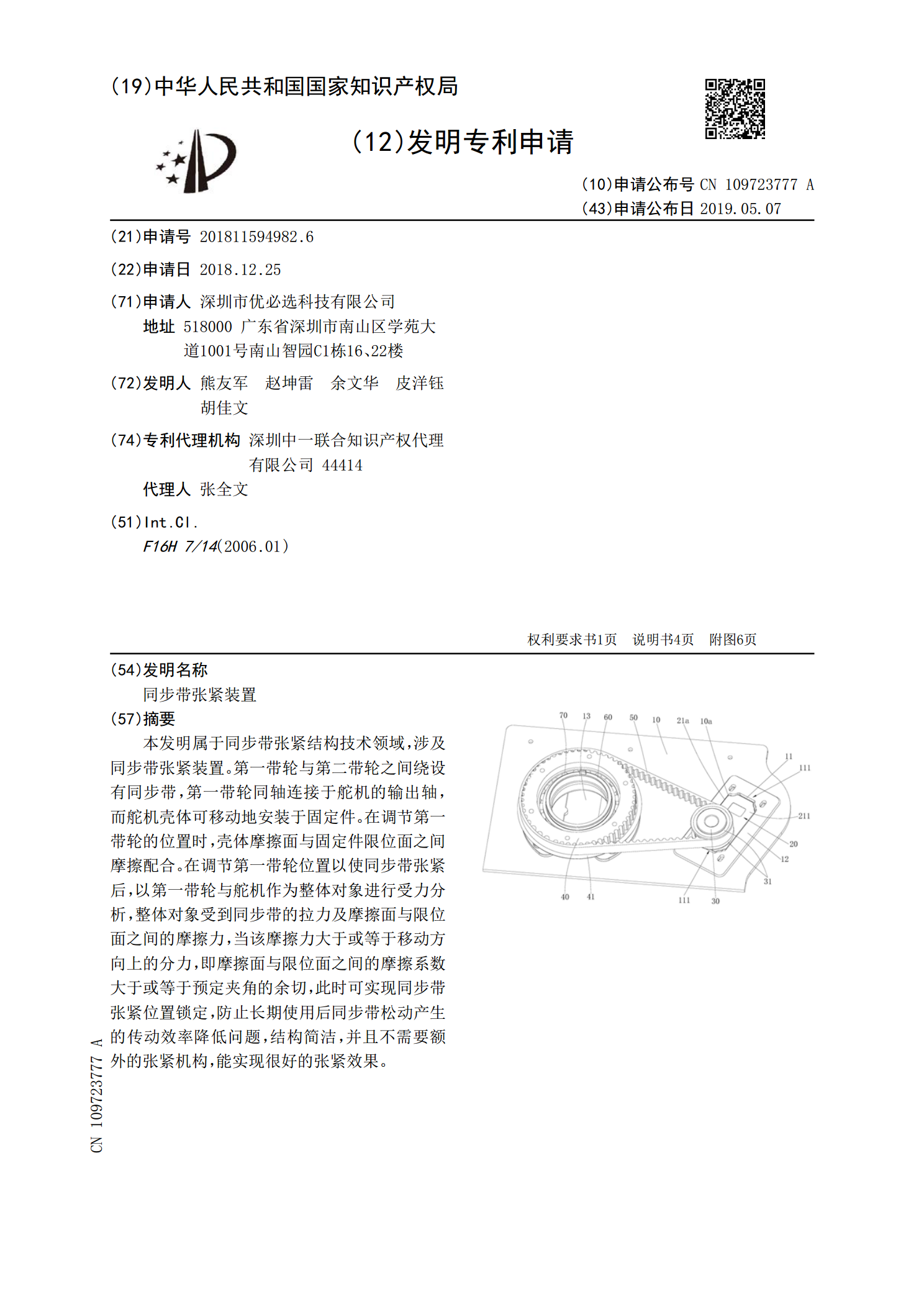
本发明属于同步带张紧结构技术领域,涉及同步带张紧装置。第一带轮与第二带轮之间绕设有同步带,第一带轮同轴连接于舵机的输出轴,而舵机壳体可移动地安装于固定件。在调节第一带轮的位置时,壳体摩擦面与固定件限位面之间摩擦配合。在调节第一带轮位置以使同步带张紧后,以第一带轮与舵机作为整体对象进行受力分析,整体对象受到同步带的拉力及摩擦面与限位面之间的摩擦力,当该摩擦力大于或等于移动方向上的分力,即摩擦面与限位面之间的摩擦系数大于或等于预定夹角的余切,此时可实现同步带张紧位置锁定,防止长期使用后同步带松动产生的传动效率
同步带张紧装置.pdf
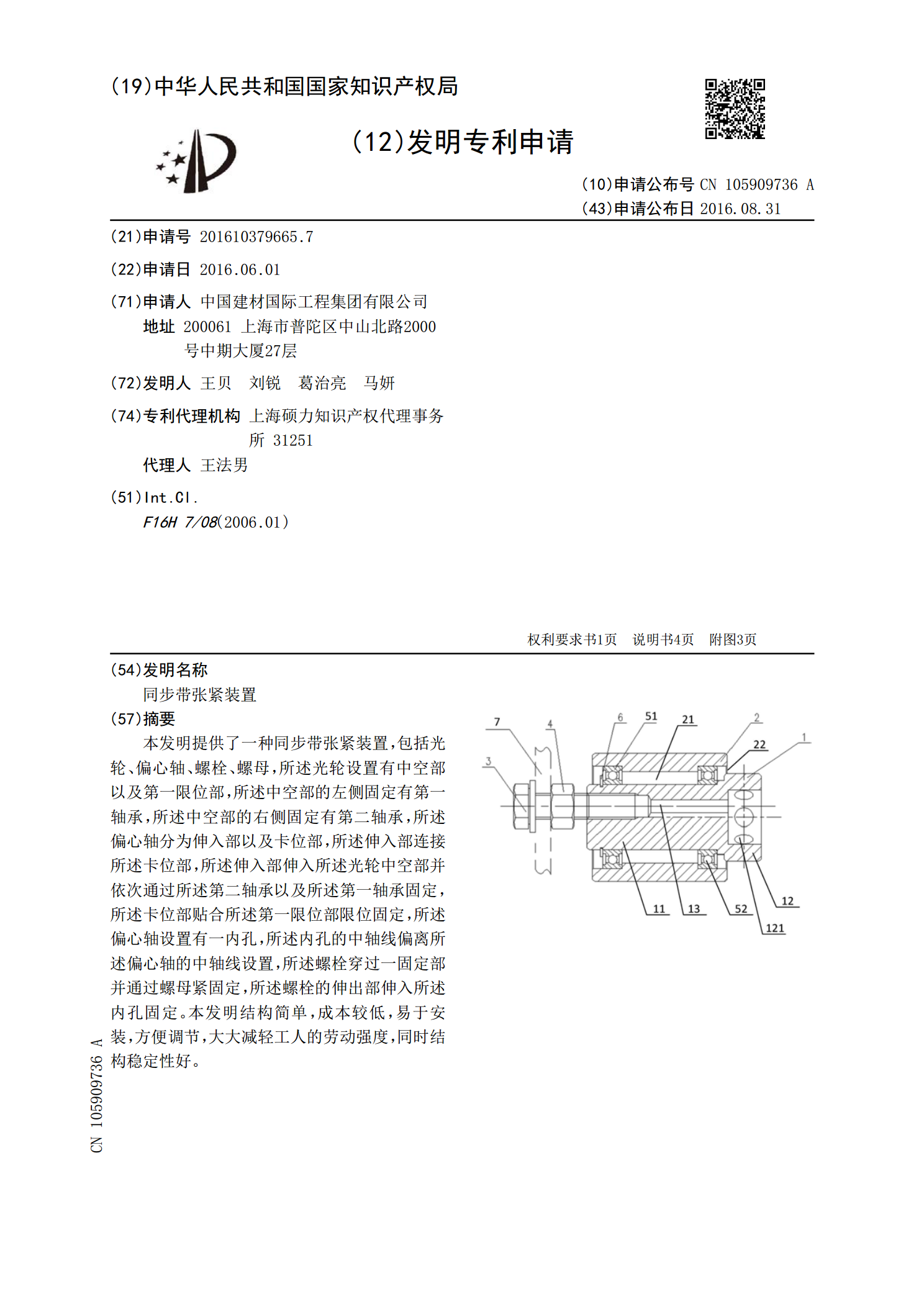
本发明提供了一种同步带张紧装置,包括光轮、偏心轴、螺栓、螺母,所述光轮设置有中空部以及第一限位部,所述中空部的左侧固定有第一轴承,所述中空部的右侧固定有第二轴承,所述偏心轴分为伸入部以及卡位部,所述伸入部连接所述卡位部,所述伸入部伸入所述光轮中空部并依次通过所述第二轴承以及所述第一轴承固定,所述卡位部贴合所述第一限位部限位固定,所述偏心轴设置有一内孔,所述内孔的中轴线偏离所述偏心轴的中轴线设置,所述螺栓穿过一固定部并通过螺母紧固定,所述螺栓的伸出部伸入所述内孔固定。本发明结构简单,成本较低,易于安装,方便