
集装箱轮廓的扫描系统和集装箱轮廓的扫描方法.pdf

子璇****君淑

1/10

2/10
3/10

4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

集装箱轮廓的扫描系统和集装箱轮廓的扫描方法.pdf
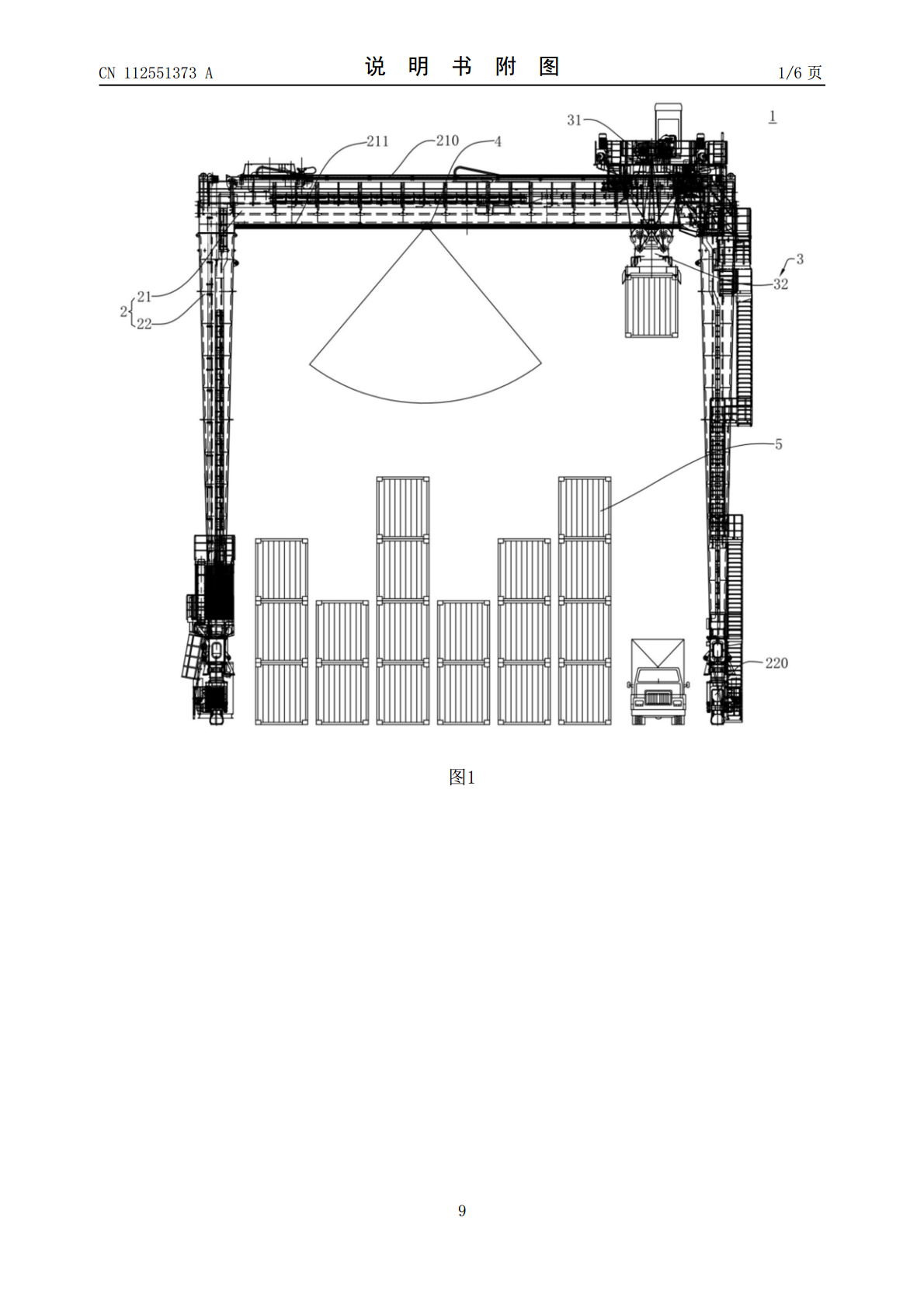
本申请公开了一种集装箱轮廓的扫描系统和集装箱轮廓的扫描方法,涉及集装箱吊装的技术领域,本申请的集装箱轮廓的扫描系统,包括支撑架、第一滑轨、第二滑轨、吊载装置和激光扫描装置,其中,支撑架具有横梁和支撑柱;第一滑轨和第二滑轨设于横梁上;吊载装置可滑动的设于第一滑轨上,用于提升和搬运集装箱;激光扫描装置可滑动地设于第二滑轨上。故本申请通过将激光扫描装置设置在场桥设备的横梁上,能够提前在支撑架未完全到位和吊载装置未运动时,启动激光扫描装置快速扫描,提供实时且完整的贝位集装箱轮廓图,解决了扫描盲区的问题,减少了吊载
轮廓扫描系统及方法.pdf
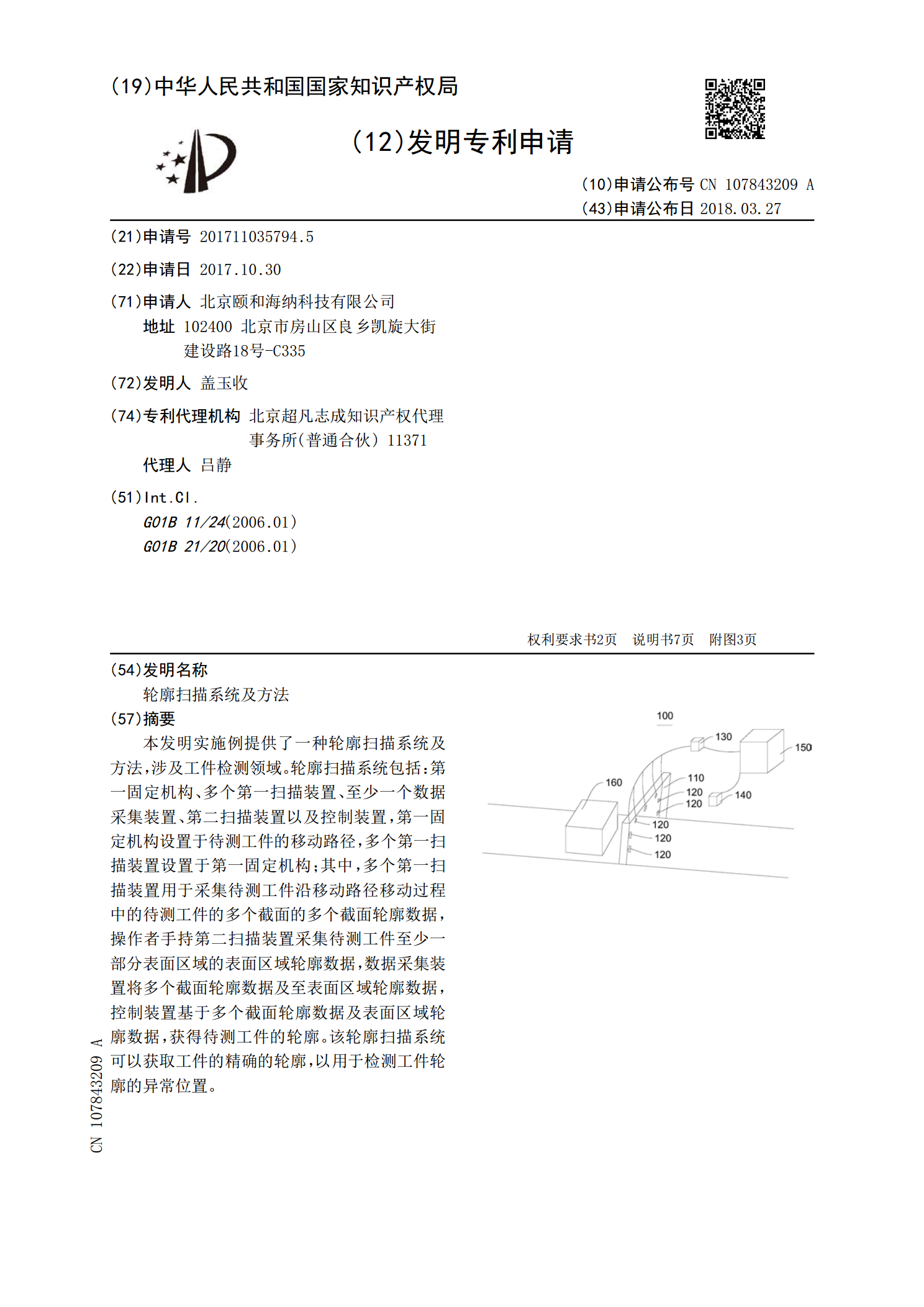
本发明实施例提供了一种轮廓扫描系统及方法,涉及工件检测领域。轮廓扫描系统包括:第一固定机构、多个第一扫描装置、至少一个数据采集装置、第二扫描装置以及控制装置,第一固定机构设置于待测工件的移动路径,多个第一扫描装置设置于第一固定机构;其中,多个第一扫描装置用于采集待测工件沿移动路径移动过程中的待测工件的多个截面的多个截面轮廓数据,操作者手持第二扫描装置采集待测工件至少一部分表面区域的表面区域轮廓数据,数据采集装置将多个截面轮廓数据及至表面区域轮廓数据,控制装置基于多个截面轮廓数据及表面区域轮廓数据,获得待测
工件轮廓扫描系统及方法.pdf
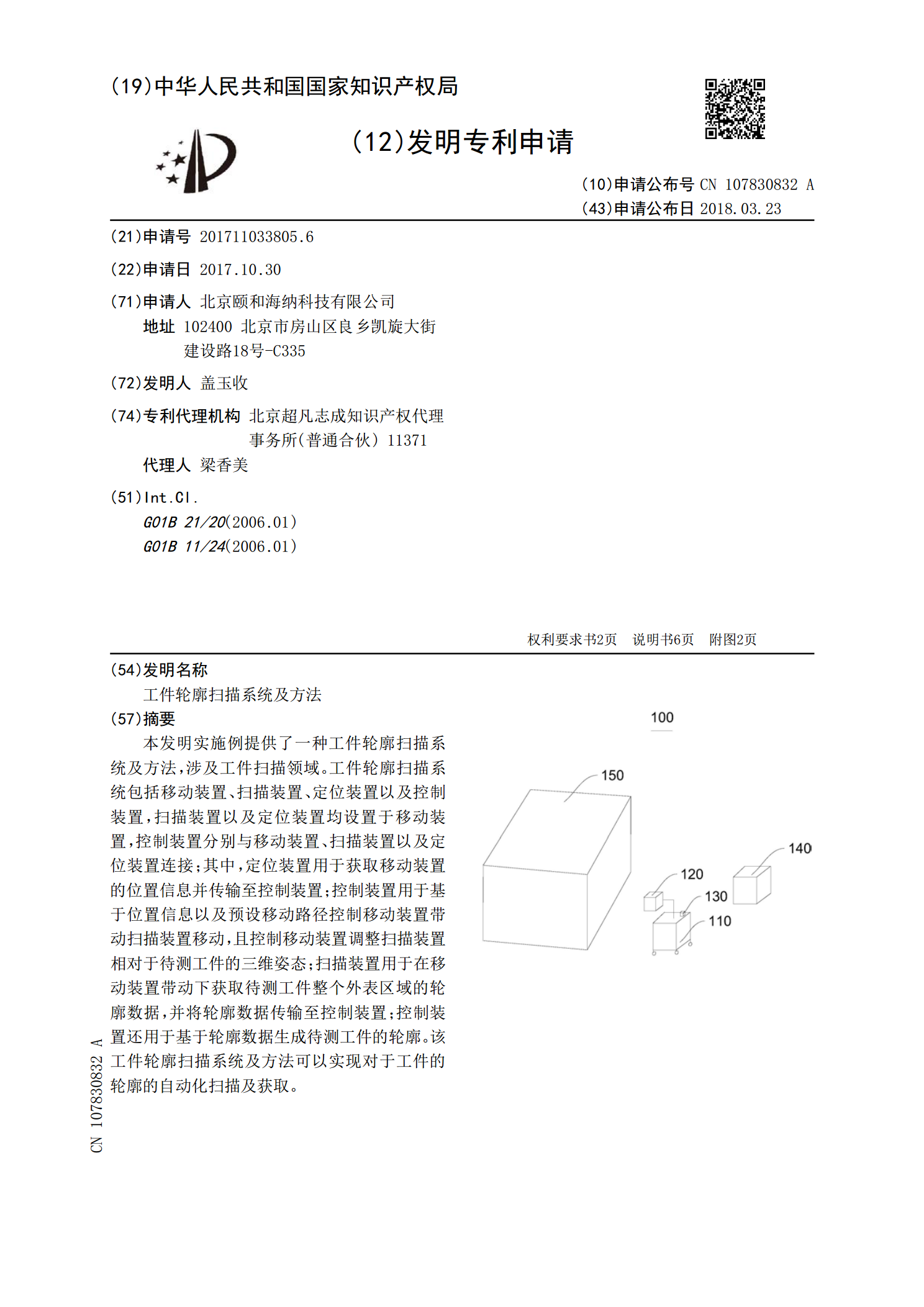
本发明实施例提供了一种工件轮廓扫描系统及方法,涉及工件扫描领域。工件轮廓扫描系统包括移动装置、扫描装置、定位装置以及控制装置,扫描装置以及定位装置均设置于移动装置,控制装置分别与移动装置、扫描装置以及定位装置连接;其中,定位装置用于获取移动装置的位置信息并传输至控制装置;控制装置用于基于位置信息以及预设移动路径控制移动装置带动扫描装置移动,且控制移动装置调整扫描装置相对于待测工件的三维姿态;扫描装置用于在移动装置带动下获取待测工件整个外表区域的轮廓数据,并将轮廓数据传输至控制装置;控制装置还用于基于轮廓数
陶瓷基板平面轮廓扫描系统及扫描方法.pdf
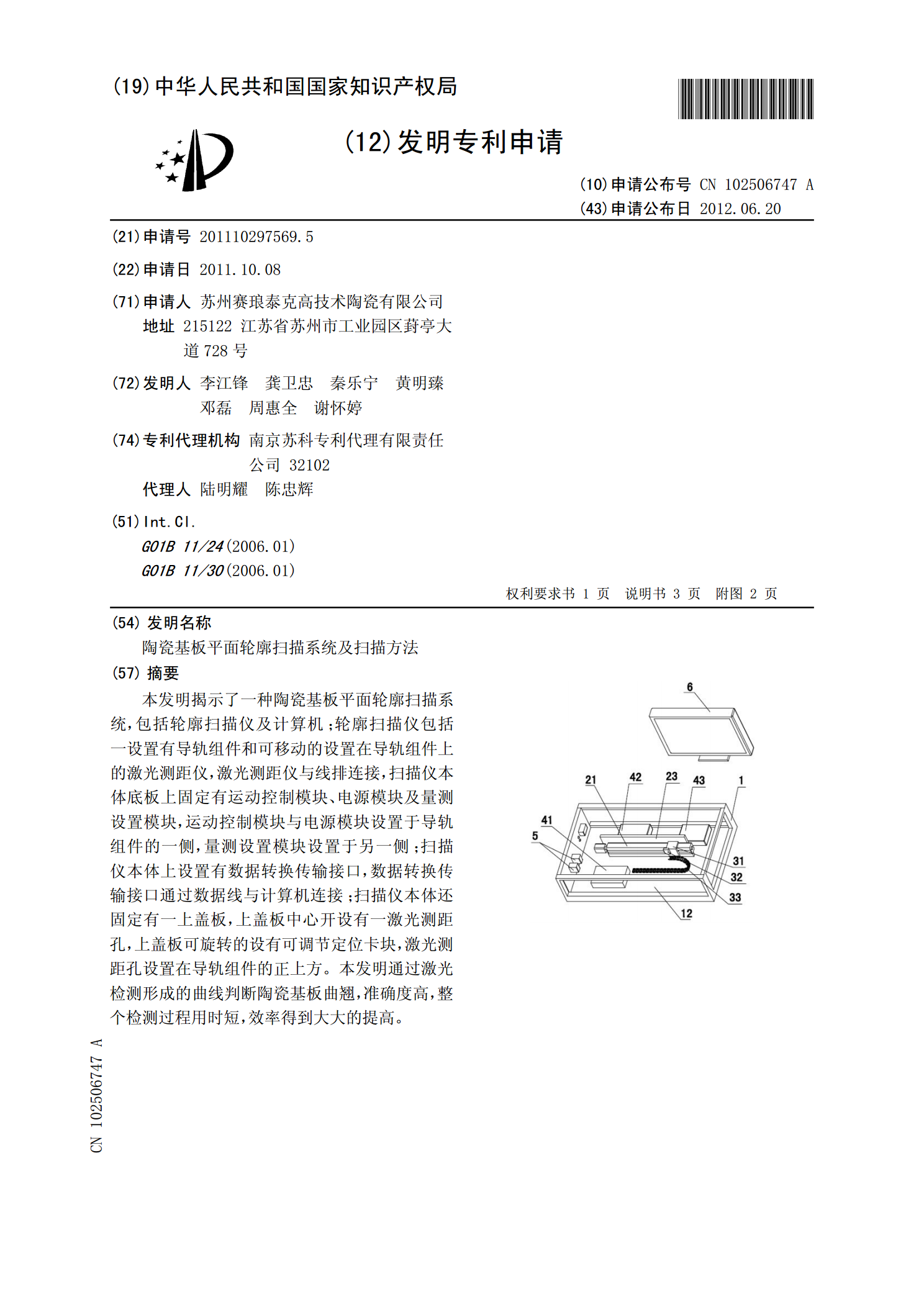
本发明揭示了一种陶瓷基板平面轮廓扫描系统,包括轮廓扫描仪及计算机;轮廓扫描仪包括一设置有导轨组件和可移动的设置在导轨组件上的激光测距仪,激光测距仪与线排连接,扫描仪本体底板上固定有运动控制模块、电源模块及量测设置模块,运动控制模块与电源模块设置于导轨组件的一侧,量测设置模块设置于另一侧;扫描仪本体上设置有数据转换传输接口,数据转换传输接口通过数据线与计算机连接;扫描仪本体还固定有一上盖板,上盖板中心开设有一激光测距孔,上盖板可旋转的设有可调节定位卡块,激光测距孔设置在导轨组件的正上方。本发明通过激光检测形

便携式轮廓仪及轮廓扫描显微镜和系统.pdf
本发明公开了一种便携式轮廓仪及轮廓扫描显微镜和系统,轮廓仪包括三轴压电陶瓷扫描管,其由X、Y和Z方向压电陶瓷驱动器构成;每一压电陶瓷驱动器包括柔性放大机构和压电陶瓷,柔性放大机构具有固定端和运动端,且被设置为使得运动端产生对压电陶瓷的变形进行放大的直线位移;X、Y、Z方向压电陶瓷驱动器及电容差分传感器依次串联连接,且X、Y、Z方向压电陶瓷驱动器分别在使得对应运动端沿X、Y、Z方向产生直线位移的方位上设置;电容差分传感器包括目标件、探针和两个感应件,探针沿Z方向与目标件固连,两个感应件各自与目标件组成一个单