
一种弧面玻璃的加工方法.pdf

玉怡****文档


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种弧面玻璃的加工方法.pdf
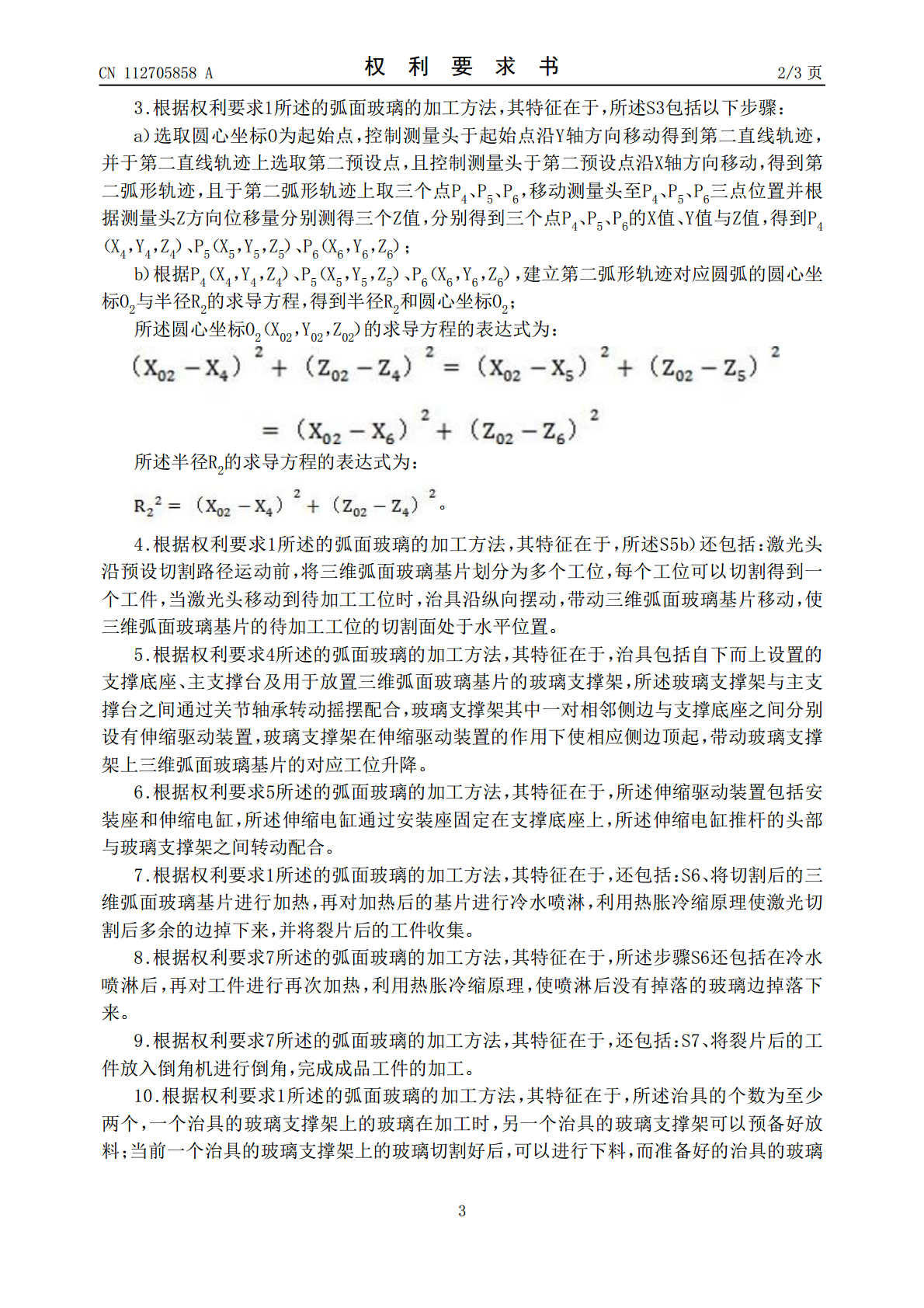
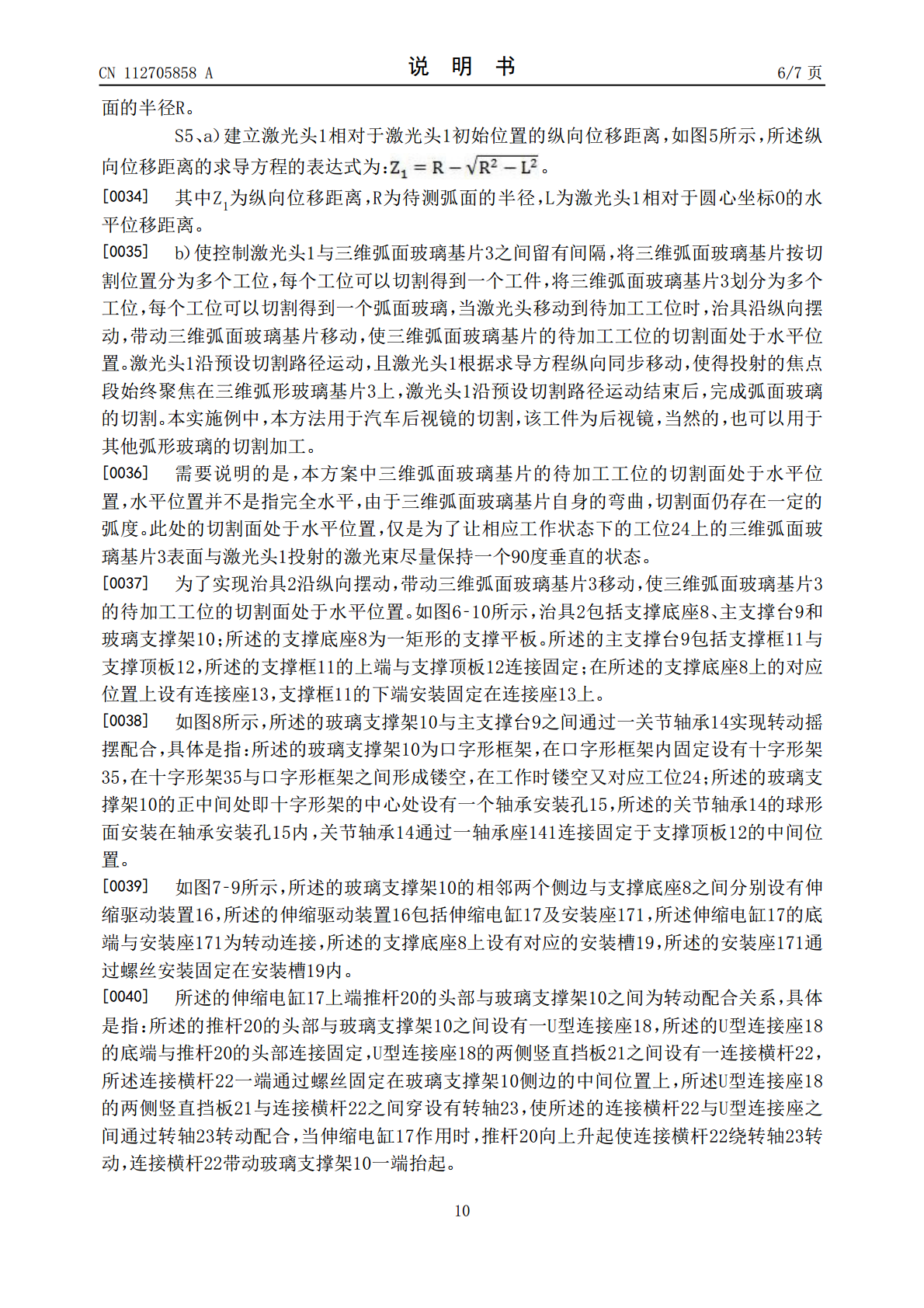
本发明公开了一种弧面玻璃的加工方法,包括以下步骤:将一三维弧面玻璃基片放置于治具的玻璃支撑架上,控制安装有位移传感器的测量头与三维弧面玻璃基片的待测弧面贴合,并建立整体坐标系OXYZ;控制测量头于X轴上选取第一预设点,控制测量头于第一预设点沿Y轴方向移动,得到第一弧形轨迹,并求得圆心坐标O
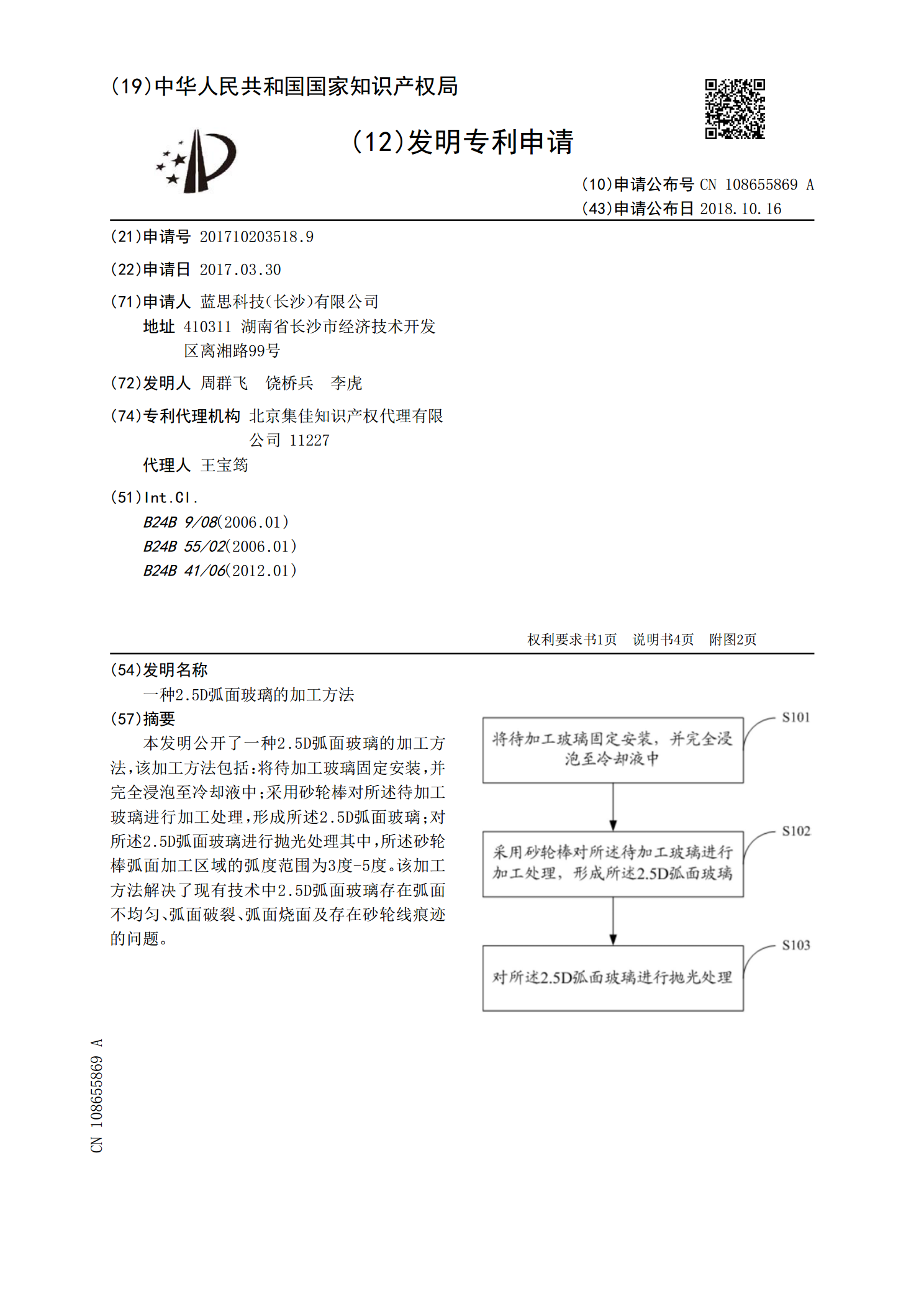
一种2.5D弧面玻璃的加工方法.pdf
本发明公开了一种2.5D弧面玻璃的加工方法,该加工方法包括:将待加工玻璃固定安装,并完全浸泡至冷却液中;采用砂轮棒对所述待加工玻璃进行加工处理,形成所述2.5D弧面玻璃;对所述2.5D弧面玻璃进行抛光处理其中,所述砂轮棒弧面加工区域的弧度范围为3度‑5度。该加工方法解决了现有技术中2.5D弧面玻璃存在弧面不均匀、弧面破裂、弧面烧面及存在砂轮线痕迹的问题。
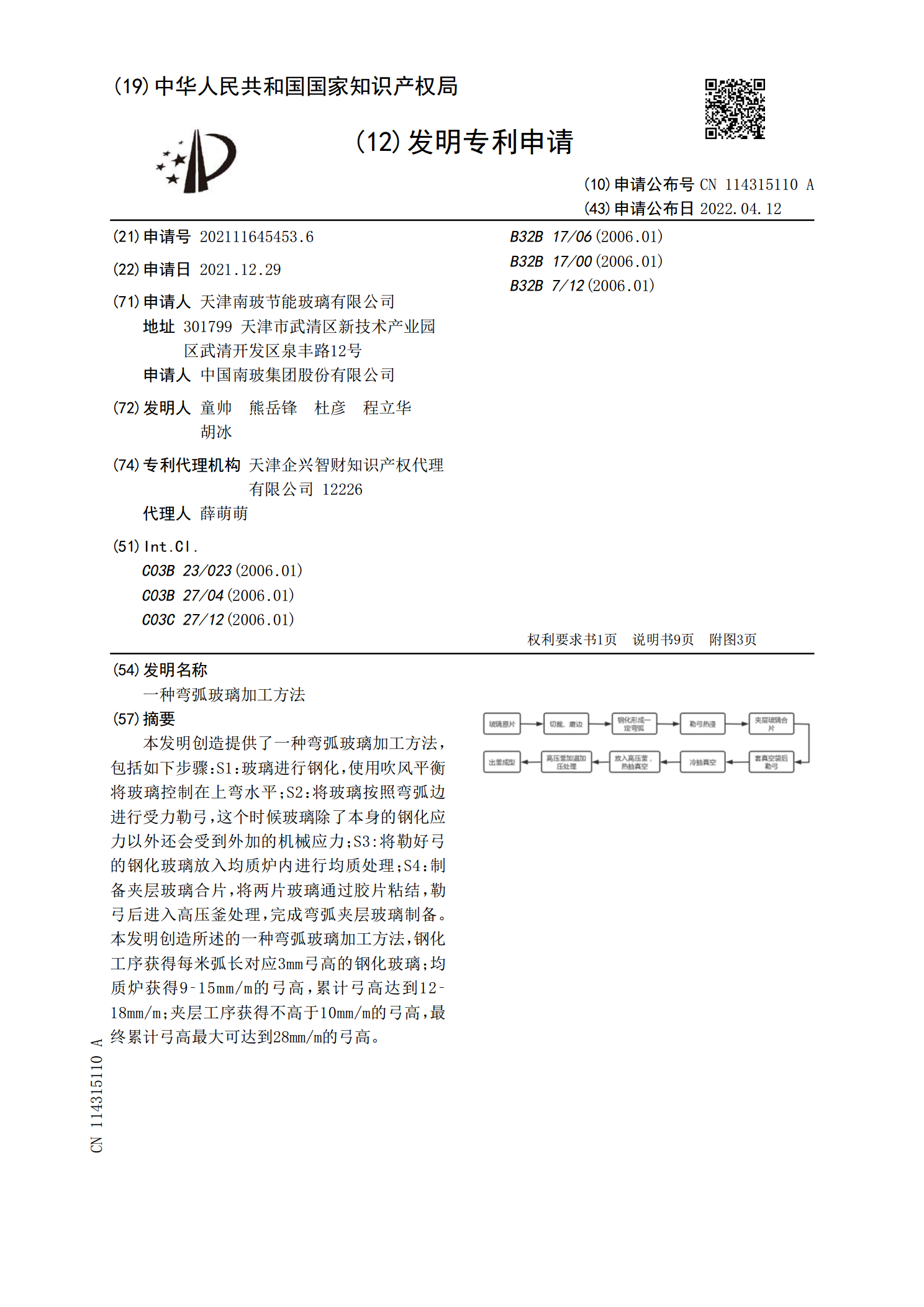
一种弯弧玻璃加工方法.pdf
本发明创造提供了一种弯弧玻璃加工方法,包括如下步骤:S1:玻璃进行钢化,使用吹风平衡将玻璃控制在上弯水平;S2:将玻璃按照弯弧边进行受力勒弓,这个时候玻璃除了本身的钢化应力以外还会受到外加的机械应力;S3:将勒好弓的钢化玻璃放入均质炉内进行均质处理;S4:制备夹层玻璃合片,将两片玻璃通过胶片粘结,勒弓后进入高压釜处理,完成弯弧夹层玻璃制备。本发明创造所述的一种弯弧玻璃加工方法,钢化工序获得每米弧长对应3mm弓高的钢化玻璃;均质炉获得9‑15mm/m的弓高,累计弓高达到12‑18mm/m;夹层工序获得不高于
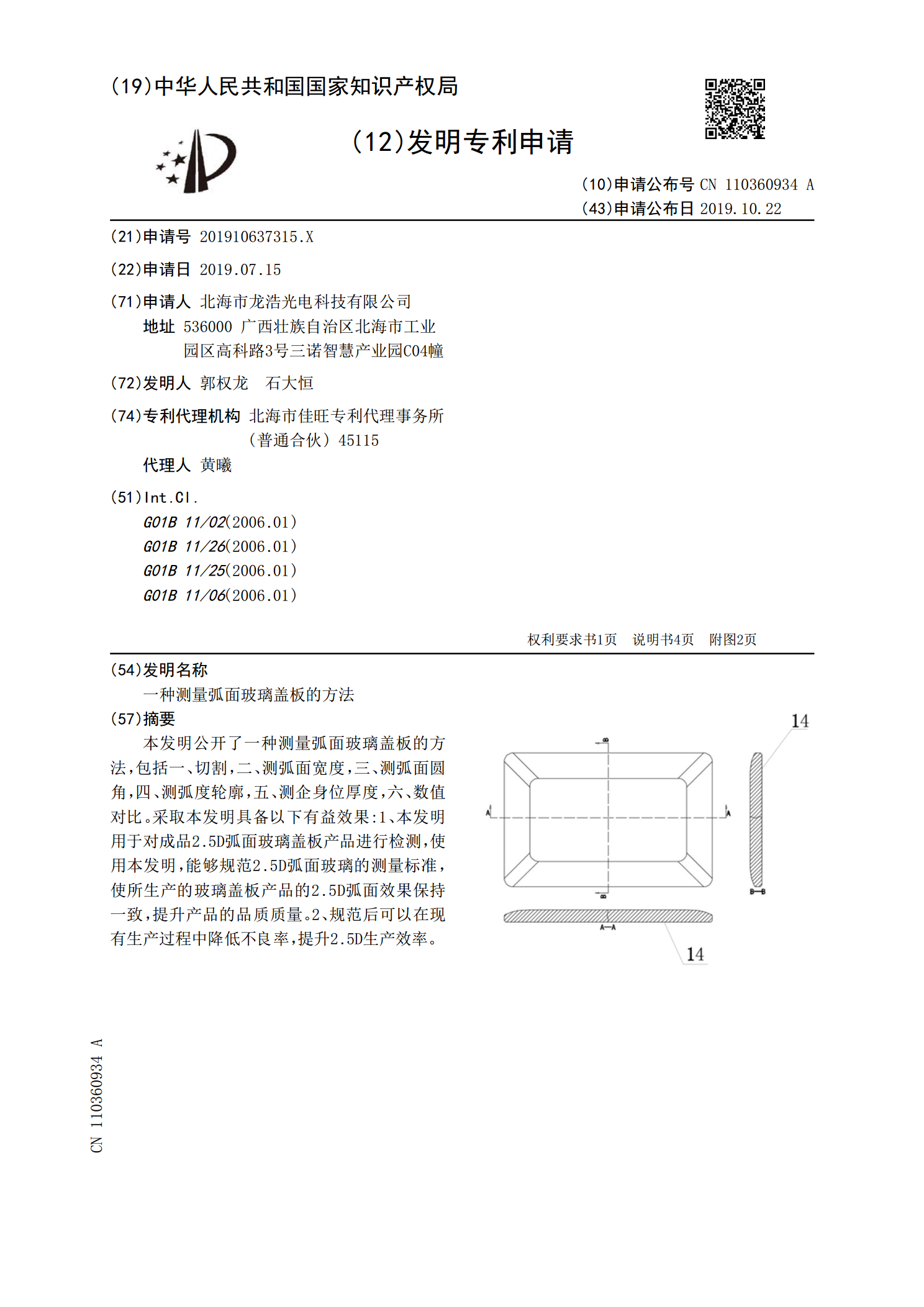
一种测量弧面玻璃盖板的方法.pdf
本发明公开了一种测量弧面玻璃盖板的方法,包括一、切割,二、测弧面宽度,三、测弧面圆角,四、测弧度轮廓,五、测企身位厚度,六、数值对比。采取本发明具备以下有益效果:1、本发明用于对成品2.5D弧面玻璃盖板产品进行检测,使用本发明,能够规范2.5D弧面玻璃的测量标准,使所生产的玻璃盖板产品的2.5D弧面效果保持一致,提升产品的品质质量。2、规范后可以在现有生产过程中降低不良率,提升2.5D生产效率。
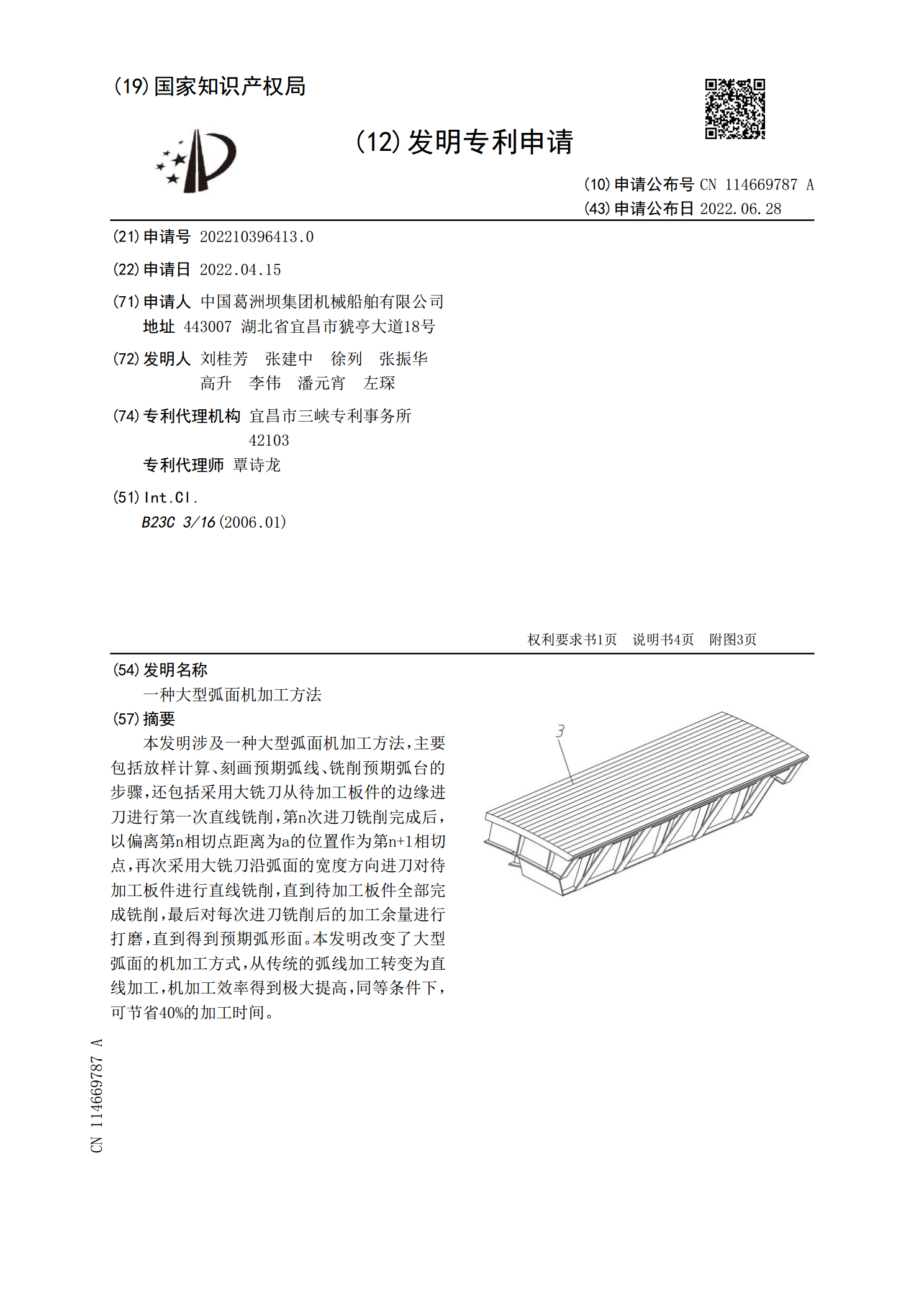
一种大型弧面机加工方法.pdf
本发明涉及一种大型弧面机加工方法,主要包括放样计算、刻画预期弧线、铣削预期弧台的步骤,还包括采用大铣刀从待加工板件的边缘进刀进行第一次直线铣削,第n次进刀铣削完成后,以偏离第n相切点距离为a的位置作为第n+1相切点,再次采用大铣刀沿弧面的宽度方向进刀对待加工板件进行直线铣削,直到待加工板件全部完成铣削,最后对每次进刀铣削后的加工余量进行打磨,直到得到预期弧形面。本发明改变了大型弧面的机加工方式,从传统的弧线加工转变为直线加工,机加工效率得到极大提高,同等条件下,可节省40%的加工时间。