
驱动系统高精度调零装置及其调零方法.pdf

一只****ng

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
驱动系统高精度调零装置及其调零方法.pdf
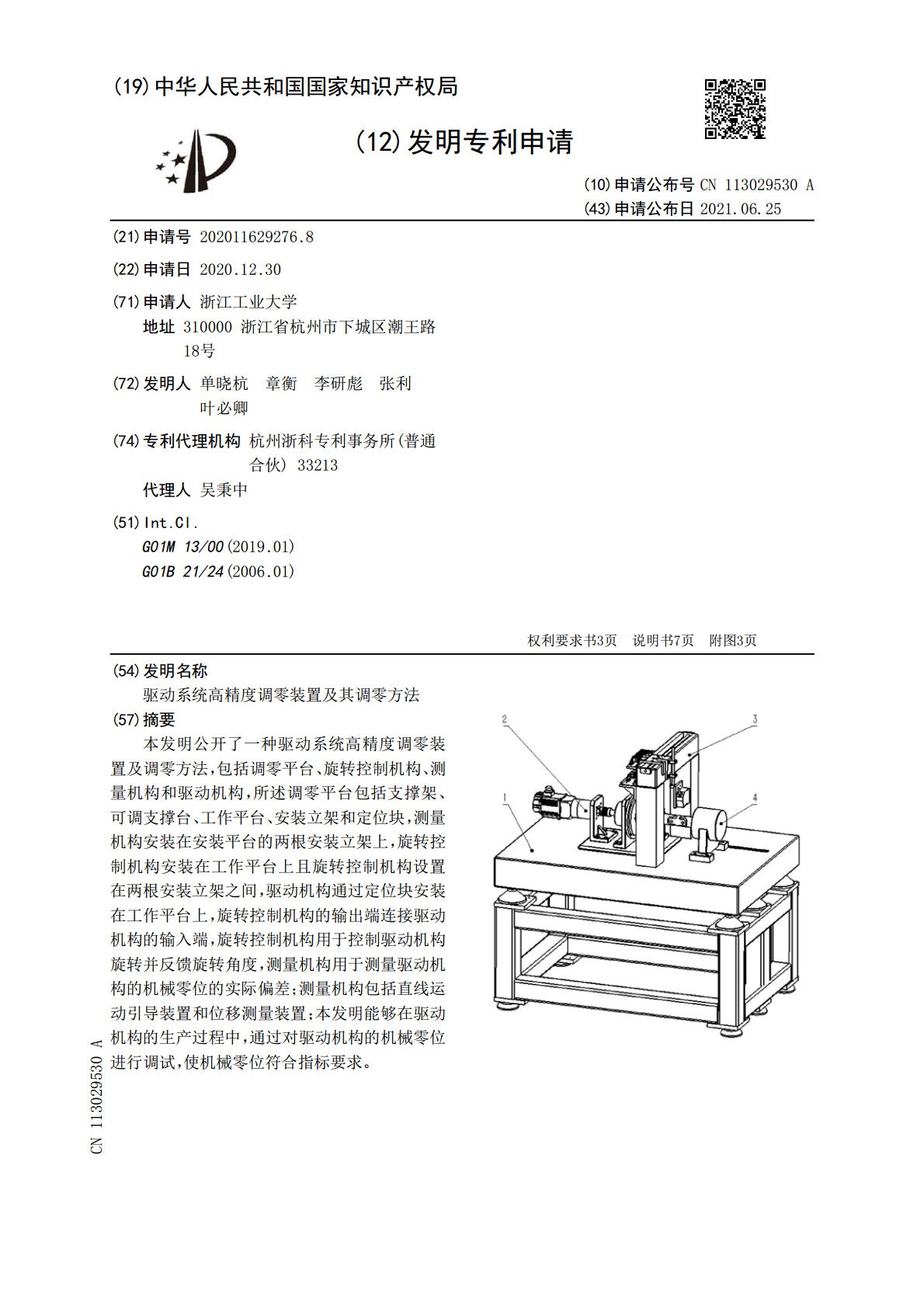
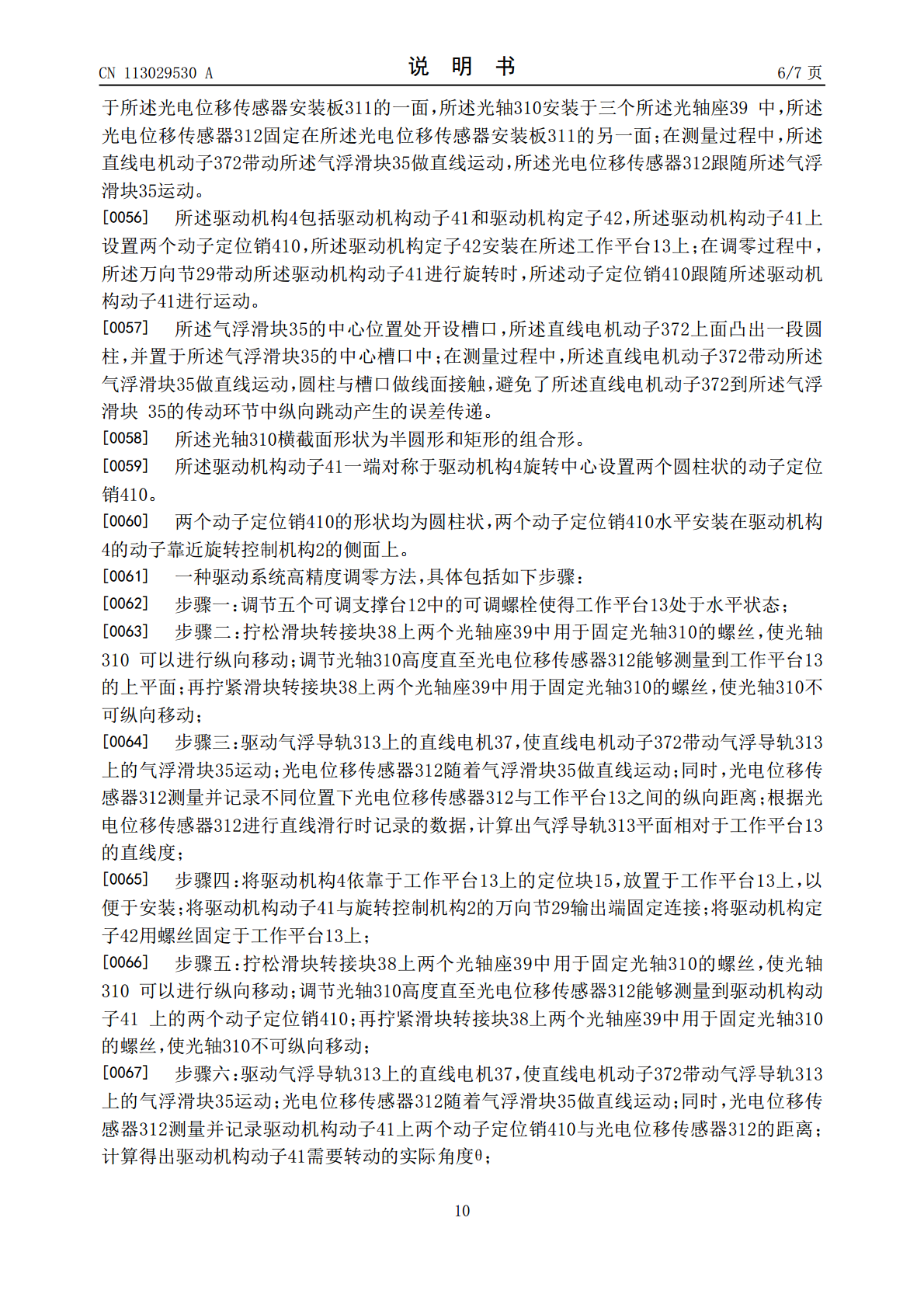
本发明公开了一种驱动系统高精度调零装置及调零方法,包括调零平台、旋转控制机构、测量机构和驱动机构,所述调零平台包括支撑架、可调支撑台、工作平台、安装立架和定位块,测量机构安装在安装平台的两根安装立架上,旋转控制机构安装在工作平台上且旋转控制机构设置在两根安装立架之间,驱动机构通过定位块安装在工作平台上,旋转控制机构的输出端连接驱动机构的输入端,旋转控制机构用于控制驱动机构旋转并反馈旋转角度,测量机构用于测量驱动机构的机械零位的实际偏差;测量机构包括直线运动引导装置和位移测量装置;本发明能够在驱动机构的生产
一种驱动机构调零装置及调零方法.pdf
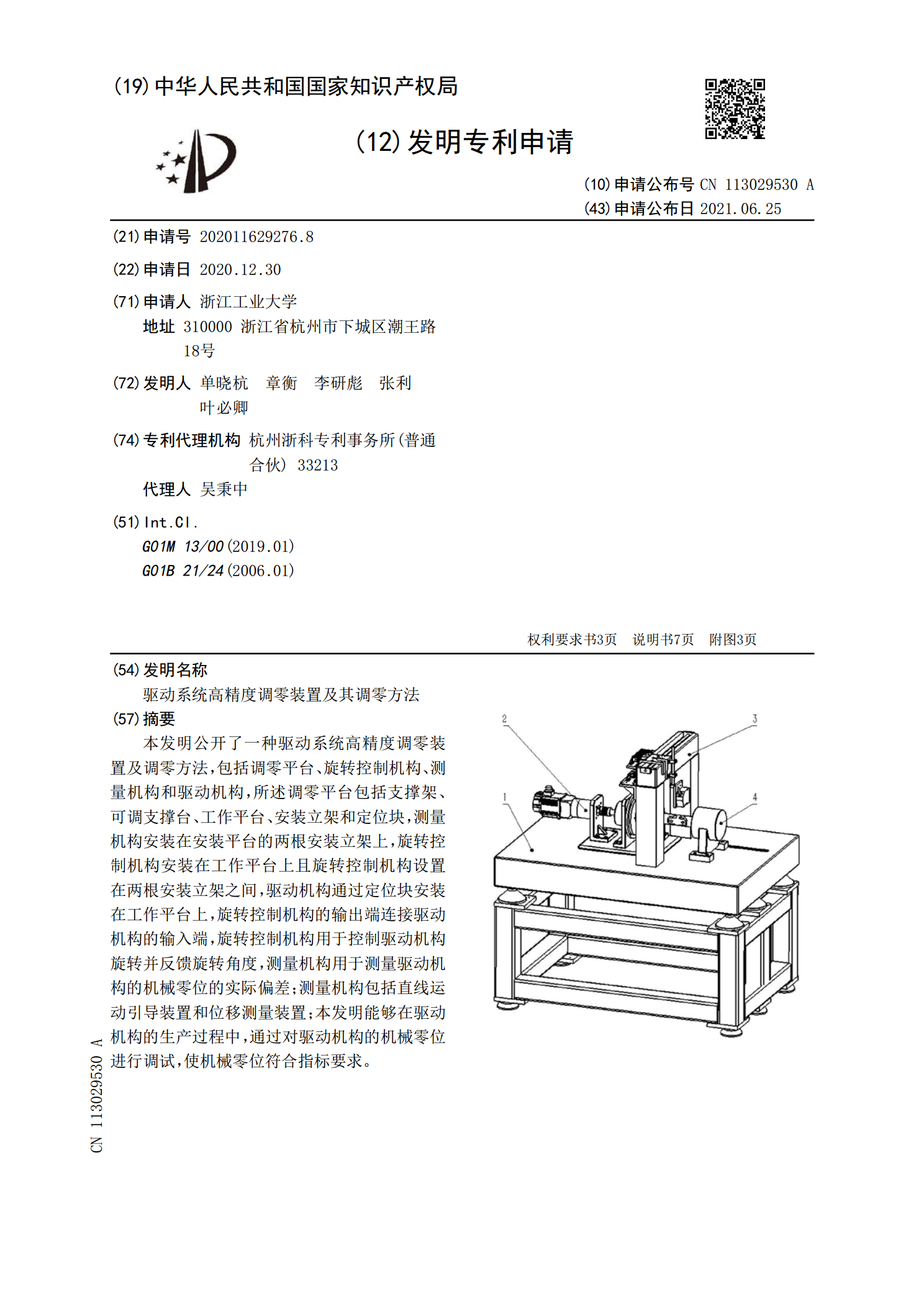
本发明公开了一种驱动机构调零装置及调零方法,包括调零平台、旋转控制机构、测量机构和驱动机构,安装平台包括支撑架、工作平台、安装立架和定位块,测量机构安装在安装平台的两根安装立架上,旋转控制机构安装在工作平台上且旋转控制机构设置在两根安装立架之间,驱动机构通过定位块安装在工作平台上,旋转控制机构的输出端连接驱动机构的输入端,旋转控制机构用于控制驱动机构旋转并反馈旋转角度,测量机构用于测量驱动机构的机械零位的实际偏差;测量机构包括直线运动引导装置和位移测量装置;本发明能够在驱动机构的生产过程中,通过对驱动机构

测量驱动机构机械零位并进行机械调零的装置及调零方法.pdf
本发明公开了一种测量驱动机构机械零位并进行机械调零的装置及调零方法,包括安装平台、旋转控制机构、测量机构和驱动机构,所述安装平台包括支撑架、工作平台、安装立架和定位块,所述测量机构安装在安装平台的两根安装立架上,旋转控制机构安装在工作平台上且旋转控制机构设置在两根安装立架之间,驱动机构通过定位块安装在工作平台上,所述旋转控制机构的输出端连接所述驱动机构的输入端,旋转控制机构用于控制所述驱动机构旋转并反馈旋转角度;测量机构用于测量所述驱动机构的机械零位的实际偏差;本发明能够在驱动机构的生产过程中,通过对驱动

轧制机架的调零系统.pdf
一种轧制机架的调零系统,其允许在用于热轧带的四辊轧制机架中更换工作圆柱或辊,并且允许随后对轧制机架调零,而不在轧制步骤期间把带从辊自身之间移除。此外,本发明的系统允许非常快速且精确地进行调零操作,从而提高整个生产系统中的生产率。

砂浆稠度仪及其调零方法.pdf
本发明实施例提供了一种砂浆稠度仪及其调零方法,涉及仪器仪表领域,用于解决现有技术中每次对砂浆稠度进行测量前需要对数值圆盘上的指针进行调节,调节过程操作比较复杂且指针易损坏的问题。本发明实施例提供的一种砂浆稠度仪,包括表盘升降架以及示值系统,所述示值系统通过齿条滑杆和齿轮安装在所述表盘升降架上,所述示值系统包括固定结构和数值圆盘,所述固定结构固定在所述表盘升降架上,所述数值圆盘与所述固定装置吸附在一起,且所述数值圆盘能够以数值圆盘的圆心为中心进行旋转。本发明实施例提供的砂浆稠度仪及其调零方法可以应用于砂浆稠