
一种架空乘人装置吊椅分发机器人.pdf

山梅****ai

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种架空乘人装置吊椅分发机器人.pdf
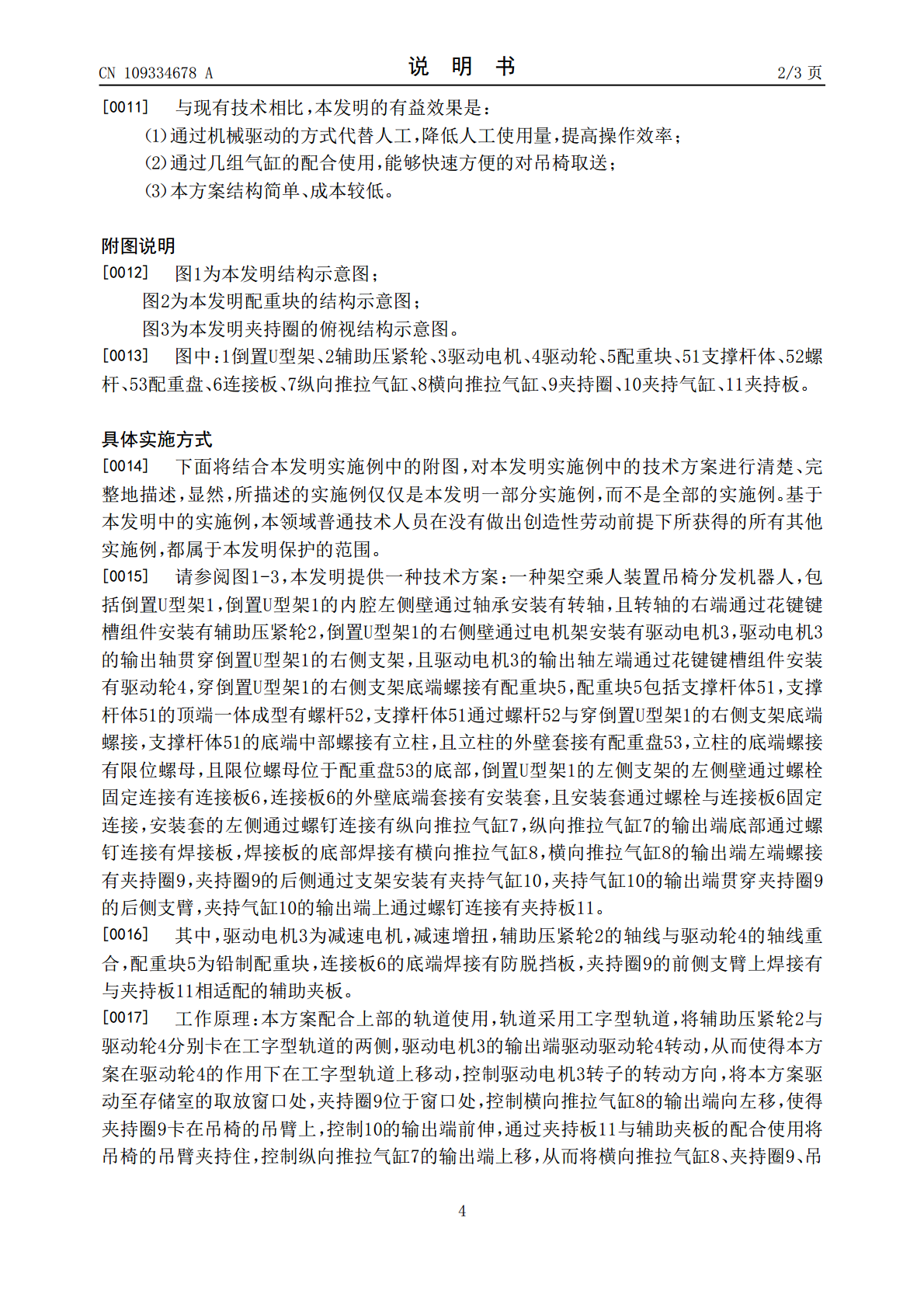
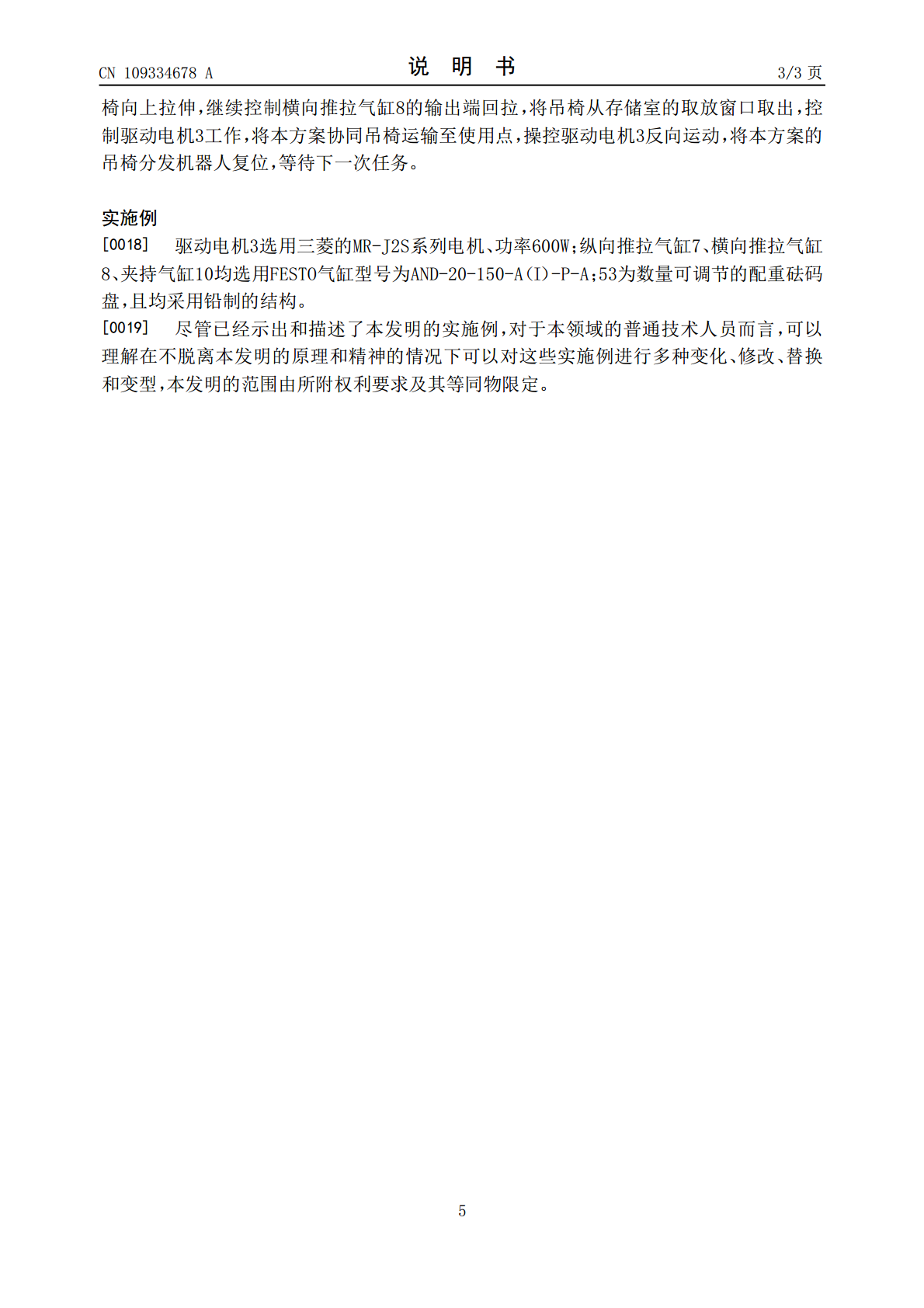
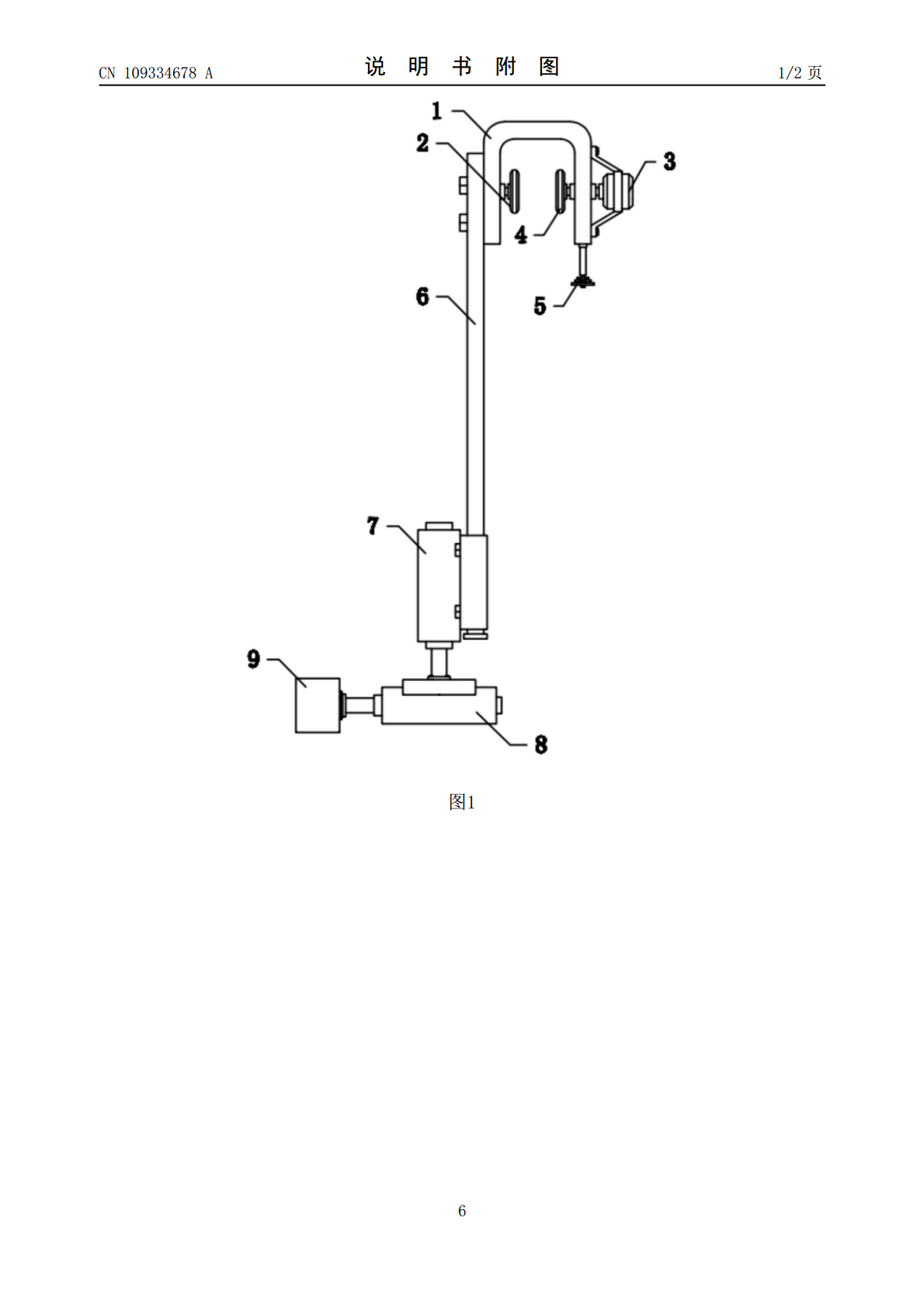
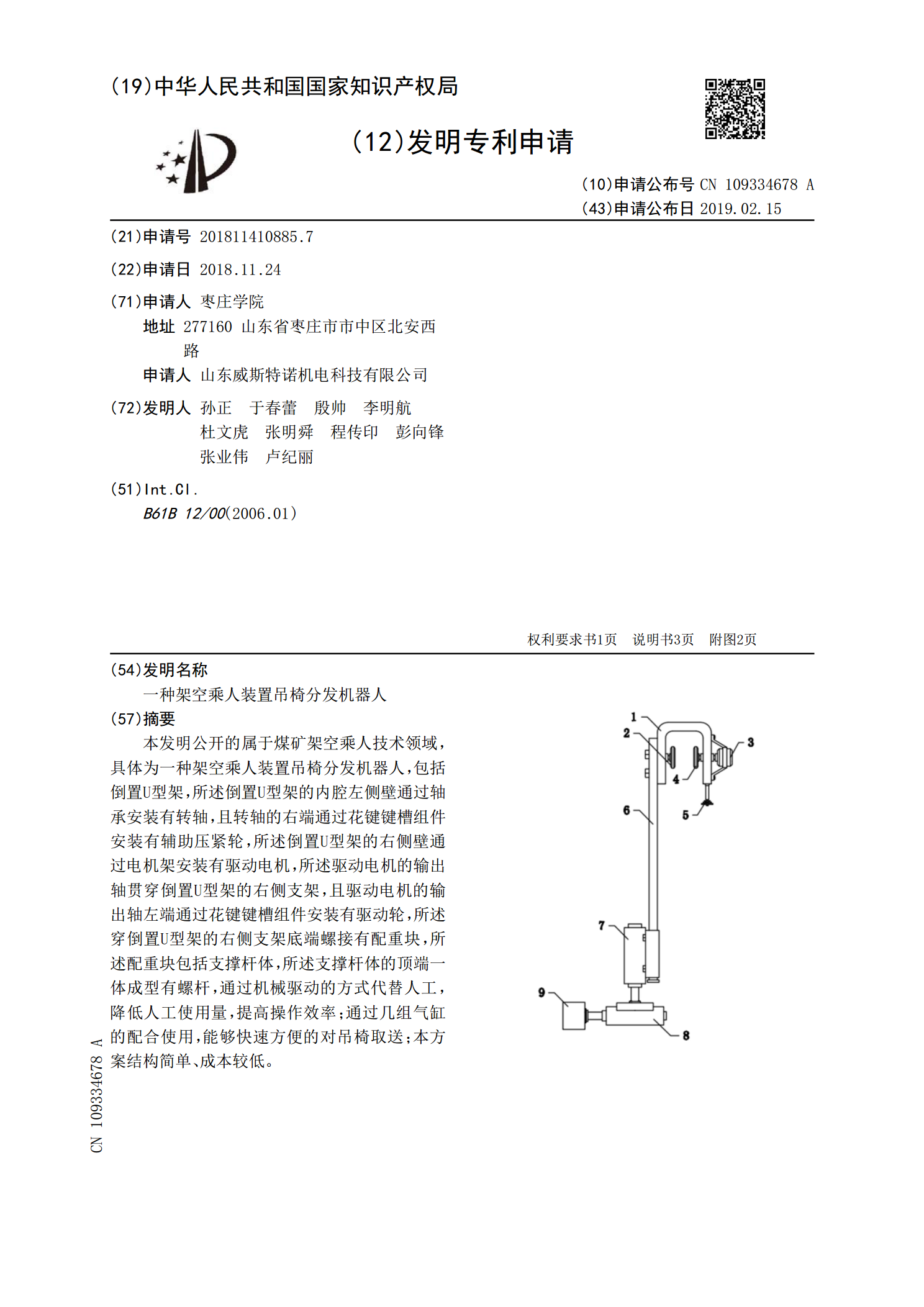
本发明公开的属于煤矿架空乘人技术领域,具体为一种架空乘人装置吊椅分发机器人,包括倒置U型架,所述倒置U型架的内腔左侧壁通过轴承安装有转轴,且转轴的右端通过花键键槽组件安装有辅助压紧轮,所述倒置U型架的右侧壁通过电机架安装有驱动电机,所述驱动电机的输出轴贯穿倒置U型架的右侧支架,且驱动电机的输出轴左端通过花键键槽组件安装有驱动轮,所述穿倒置U型架的右侧支架底端螺接有配重块,所述配重块包括支撑杆体,所述支撑杆体的顶端一体成型有螺杆,通过机械驱动的方式代替人工,降低人工使用量,提高操作效率;通过几组气缸的配合使
一种架空乘人装置吊椅存储机器人.pdf
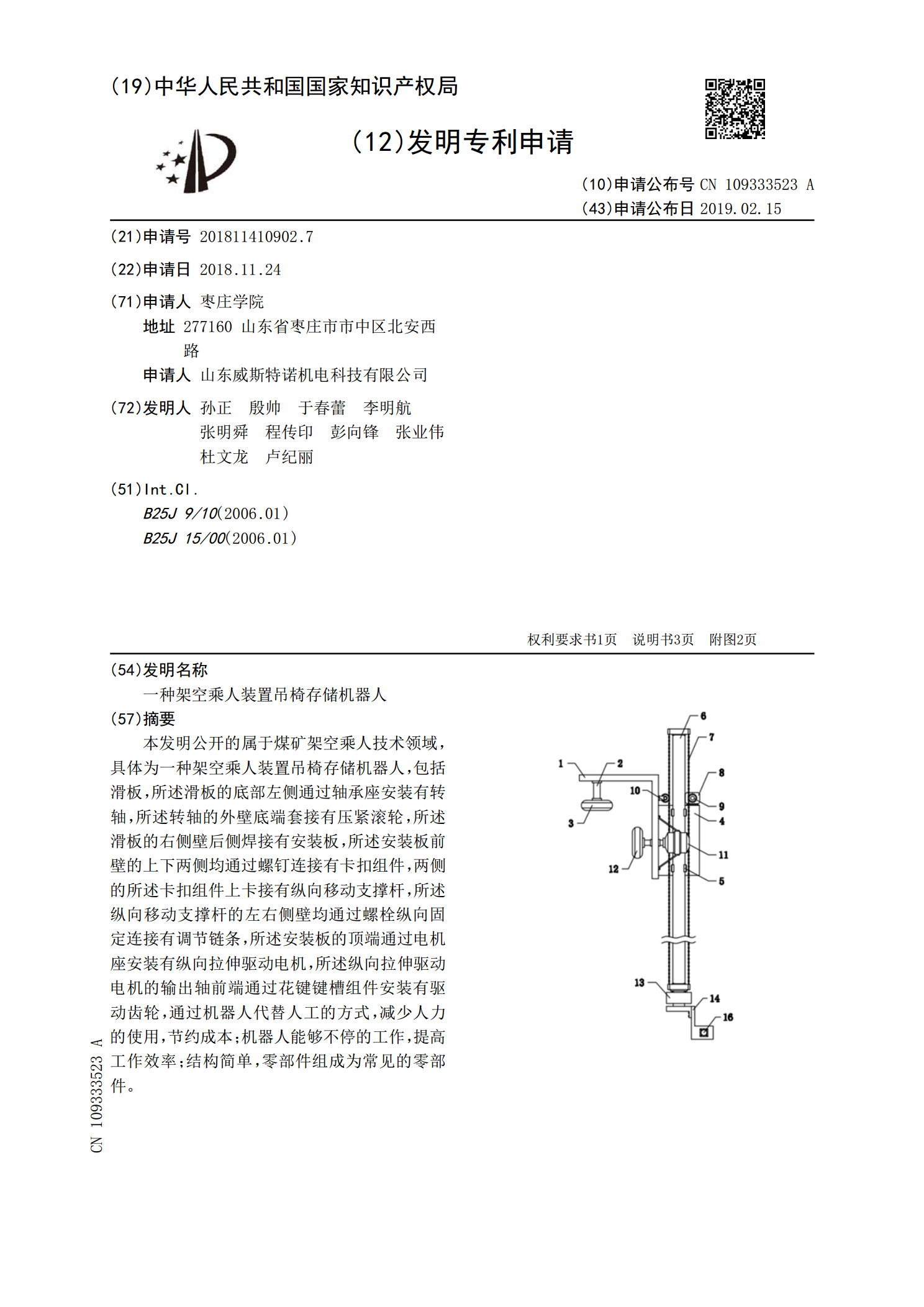
本发明公开的属于煤矿架空乘人技术领域,具体为一种架空乘人装置吊椅存储机器人,包括滑板,所述滑板的底部左侧通过轴承座安装有转轴,所述转轴的外壁底端套接有压紧滚轮,所述滑板的右侧壁后侧焊接有安装板,所述安装板前壁的上下两侧均通过螺钉连接有卡扣组件,两侧的所述卡扣组件上卡接有纵向移动支撑杆,所述纵向移动支撑杆的左右侧壁均通过螺栓纵向固定连接有调节链条,所述安装板的顶端通过电机座安装有纵向拉伸驱动电机,所述纵向拉伸驱动电机的输出轴前端通过花键键槽组件安装有驱动齿轮,通过机器人代替人工的方式,减少人力的使用,节约成
架空乘人装置、吊椅循环存储装置及其吊椅静态上车装置.pdf
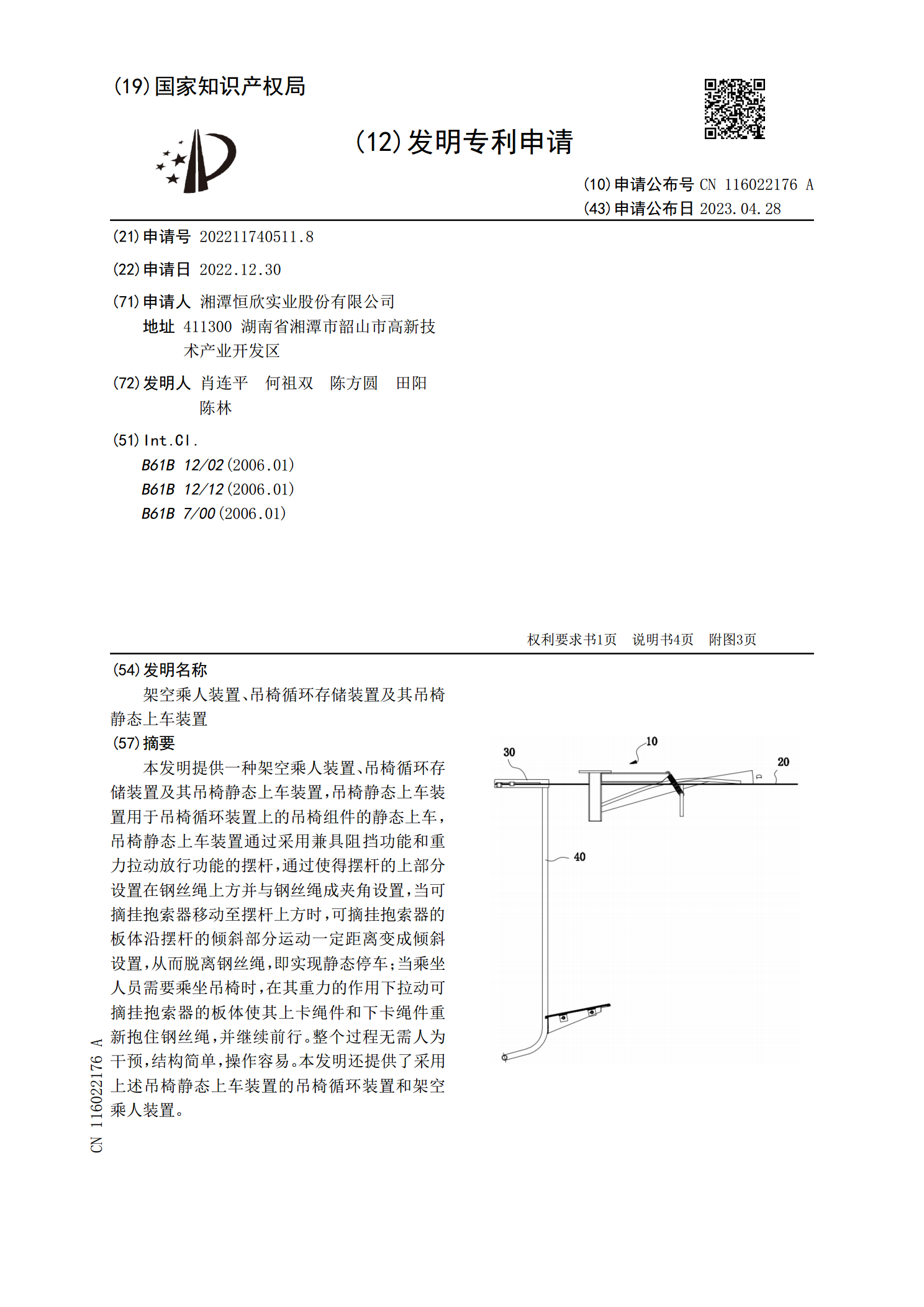
本发明提供一种架空乘人装置、吊椅循环存储装置及其吊椅静态上车装置,吊椅静态上车装置用于吊椅循环装置上的吊椅组件的静态上车,吊椅静态上车装置通过采用兼具阻挡功能和重力拉动放行功能的摆杆,通过使得摆杆的上部分设置在钢丝绳上方并与钢丝绳成夹角设置,当可摘挂抱索器移动至摆杆上方时,可摘挂抱索器的板体沿摆杆的倾斜部分运动一定距离变成倾斜设置,从而脱离钢丝绳,即实现静态停车;当乘坐人员需要乘坐吊椅时,在其重力的作用下拉动可摘挂抱索器的板体使其上卡绳件和下卡绳件重新抱住钢丝绳,并继续前行。整个过程无需人为干预,结构简单
一种架空乘人装置吊椅循环存储装置.pdf
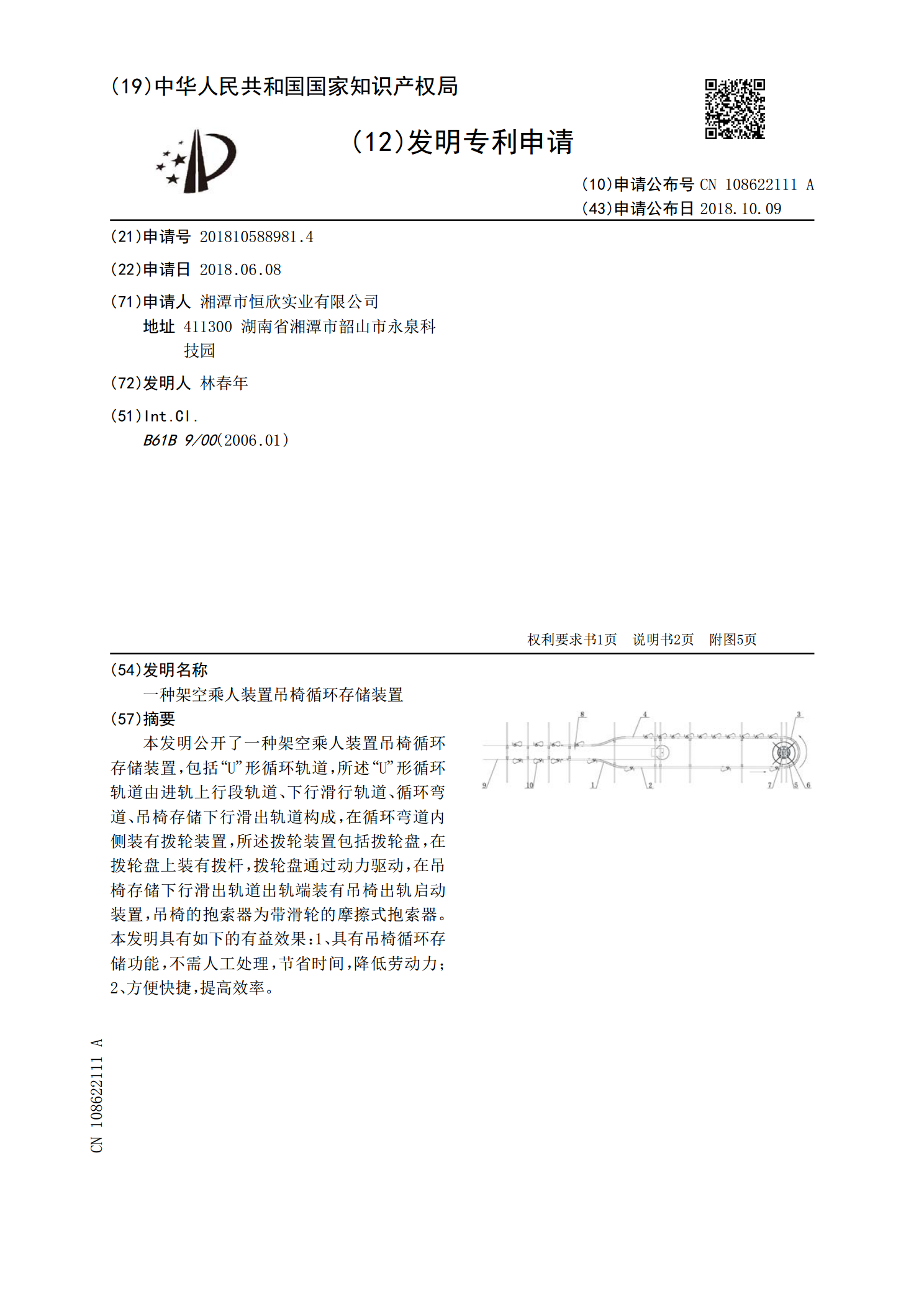
本发明公开了一种架空乘人装置吊椅循环存储装置,包括“U”形循环轨道,所述“U”形循环轨道由进轨上行段轨道、下行滑行轨道、循环弯道、吊椅存储下行滑出轨道构成,在循环弯道内侧装有拨轮装置,所述拨轮装置包括拨轮盘,在拨轮盘上装有拨杆,拨轮盘通过动力驱动,在吊椅存储下行滑出轨道出轨端装有吊椅出轨启动装置,吊椅的抱索器为带滑轮的摩擦式抱索器。本发明具有如下的有益效果:1、具有吊椅循环存储功能,不需人工处理,节省时间,降低劳动力;2、方便快捷,提高效率。
架空乘人装置与单轨吊立交机构.pdf
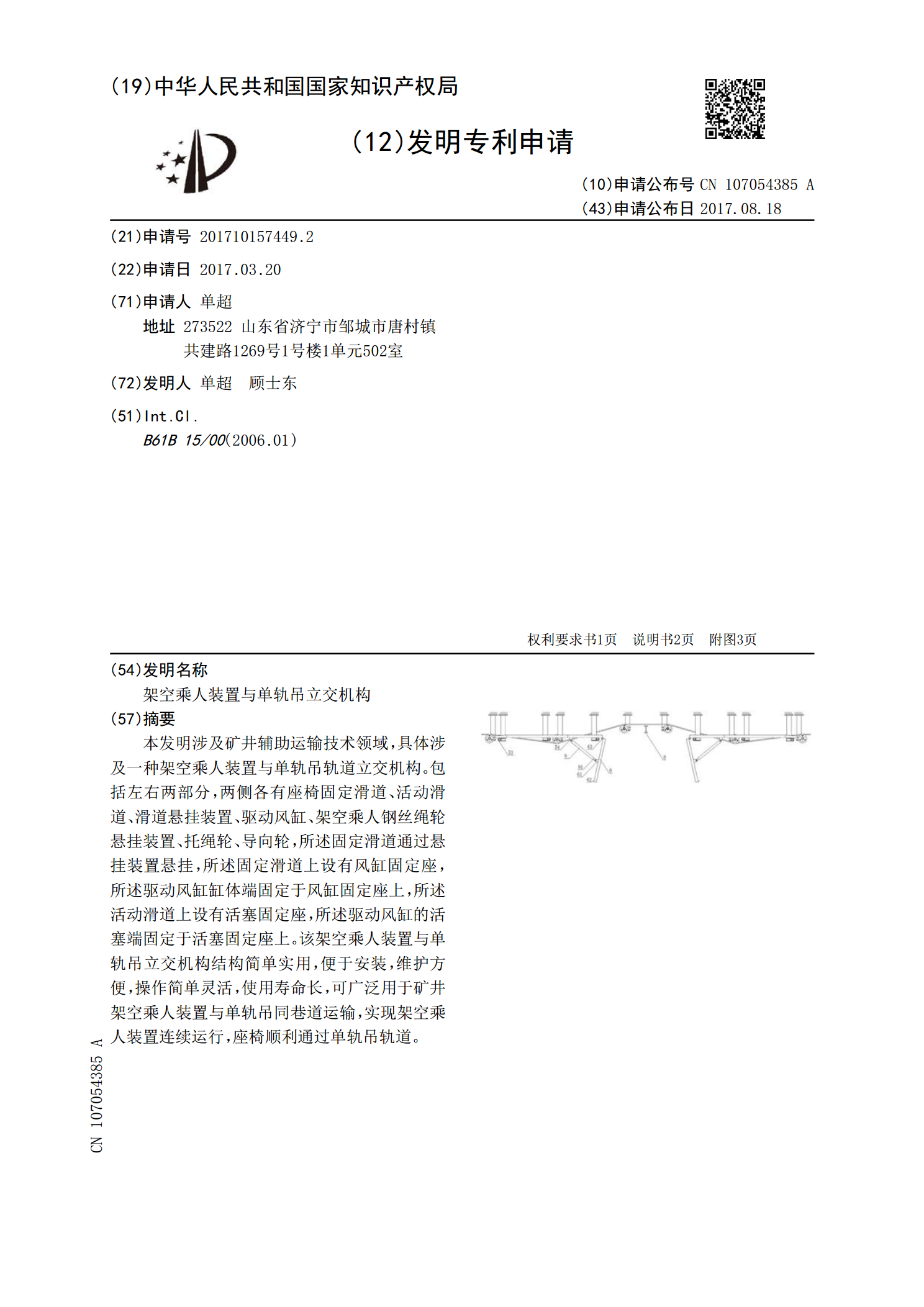
本发明涉及矿井辅助运输技术领域,具体涉及一种架空乘人装置与单轨吊轨道立交机构。包括左右两部分,两侧各有座椅固定滑道、活动滑道、滑道悬挂装置、驱动风缸、架空乘人钢丝绳轮悬挂装置、托绳轮、导向轮,所述固定滑道通过悬挂装置悬挂,所述固定滑道上设有风缸固定座,所述驱动风缸缸体端固定于风缸固定座上,所述活动滑道上设有活塞固定座,所述驱动风缸的活塞端固定于活塞固定座上。该架空乘人装置与单轨吊立交机构结构简单实用,便于安装,维护方便,操作简单灵活,使用寿命长,可广泛用于矿井架空乘人装置与单轨吊同巷道运输,实现架空乘人装