
一种压力可控的工业机器人磨抛系统及磨抛方法.pdf

诗文****仙女

1/6
2/6
3/6
4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种压力可控的工业机器人磨抛系统及磨抛方法.pdf
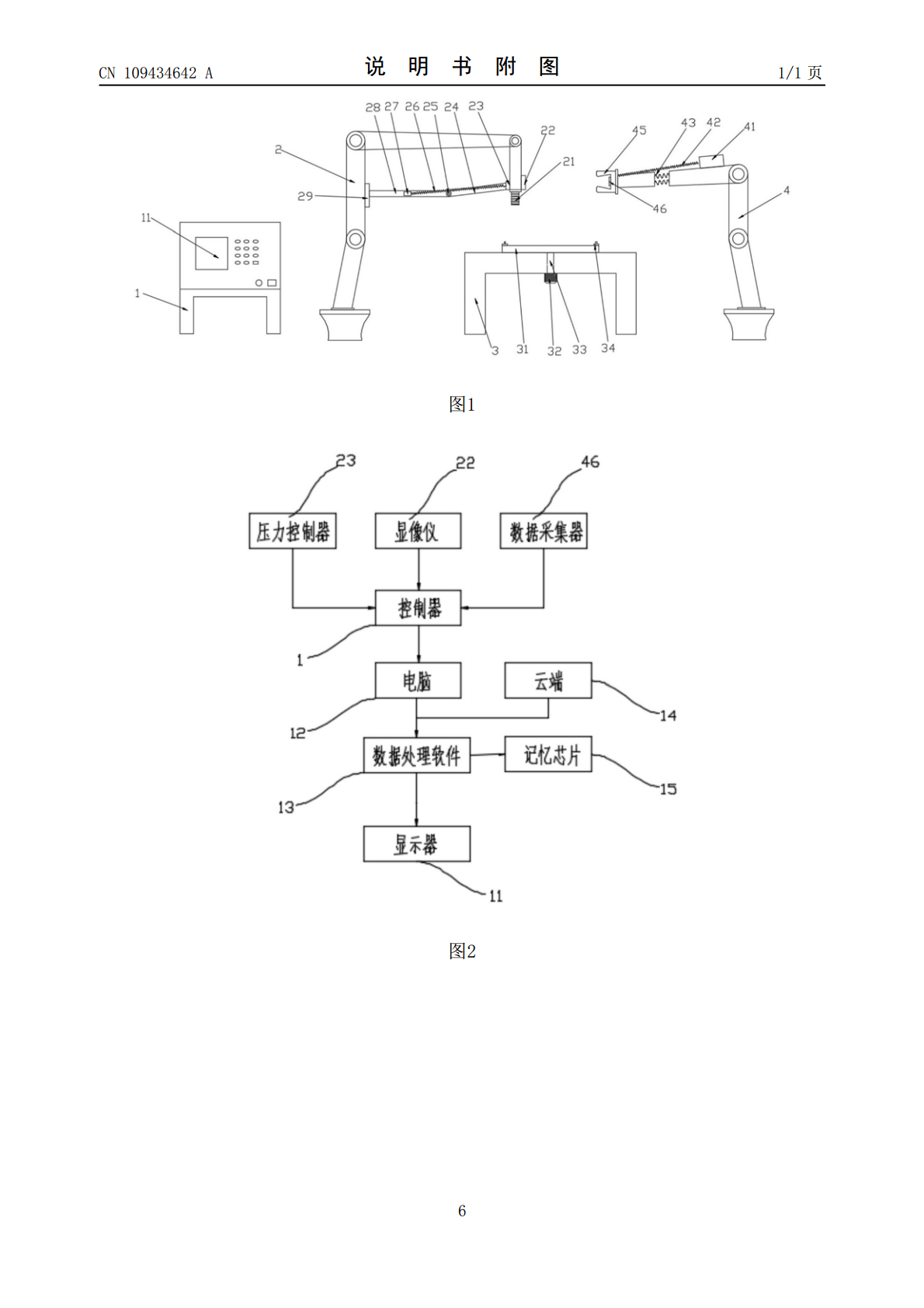
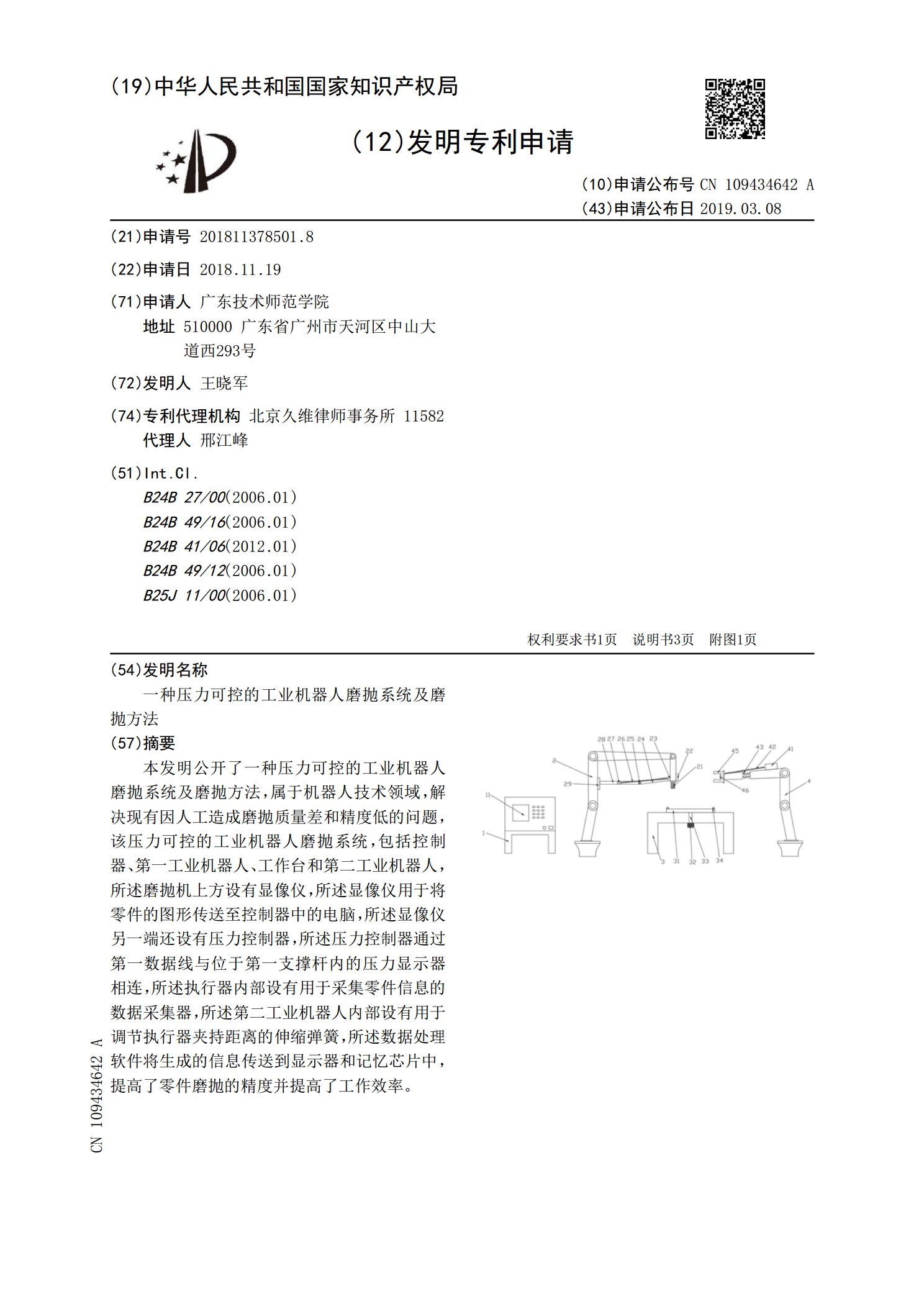
本发明公开了一种压力可控的工业机器人磨抛系统及磨抛方法,属于机器人技术领域,解决现有因人工造成磨抛质量差和精度低的问题,该压力可控的工业机器人磨抛系统,包括控制器、第一工业机器人、工作台和第二工业机器人,所述磨抛机上方设有显像仪,所述显像仪用于将零件的图形传送至控制器中的电脑,所述显像仪另一端还设有压力控制器,所述压力控制器通过第一数据线与位于第一支撑杆内的压力显示器相连,所述执行器内部设有用于采集零件信息的数据采集器,所述第二工业机器人内部设有用于调节执行器夹持距离的伸缩弹簧,所述数据处理软件将生成的信

工业机器人自动磨抛系统.docx
20101^it农况第4期'FUJIANNONGJIFUJIANNONGJI-41~翠卷I谚建农机弟4期IFUJIANNONGJI_•&-40-FUJIANNONGJIFUJIANNONGJI39:I诡建衣机第4期IFUJIANNONGJI工业机器人自动磨抛系统刘克(福建交通职业技术学院,福建福州350007)摘要:介绍一种用于卫浴产品表面加工的工业机器人自动磨抛系统,着重介绍砂抛加工机构和布抛加工机构的基本原理,以及它们的控制系统和主要控制变量。实践证明,采用这种加工设备,可以使卫浴产品的生产达到要求。
工业机器人自动磨抛系统.docx
20101^it农况第4期'FUJIANNONGJIFUJIANNONGJI-41~翠卷I谚建农机弟4期IFUJIANNONGJI_•&-40-FUJIANNONGJIFUJIANNONGJI39:I诡建衣机第4期IFUJIANNONGJI工业机器人自动磨抛系统刘克(福建交通职业技术学院,福建福州350007)摘要:介绍一种用于卫浴产品表面加工的工业机器人自动磨抛系统,着重介绍砂抛加工机构和布抛加工机构的基本原理,以及它们的控制系统和主要控制变量。实践证明,采用这种加工设备,可以使卫浴产品的生产达到要求。
一种机器人砂带磨抛系统的磨抛机接触轮自动退让方法.pdf
本发明公开了一种机器人砂带磨抛系统的磨抛机接触轮自动退让方法,包括以下步骤:S1、当机器人本体夹持工件在磨抛机上进行打磨作业发生突发状况时,机器人控制器产生停止信号;S2、磨抛机控制器接收停止信号后,对磨抛机接触轮退让气缸电气比例阀发出控制指令,并通过控制气缸气压大小调节磨抛机退让气缸的运动,实现磨抛机接触轮的及时退让;S3、在突发状况处理完成后,机器人控制器发送复位信号给磨抛机控制器,磨抛机控制器随即控制退让气缸和驱动轮电机协同工作,实现磨抛机的复位与正常工作。本发明实现了磨抛机接触轮在磨抛系统发生突发
一种木材磨抛设备及其磨抛方法.pdf
本发明公开了一种木材磨抛设备及其磨抛方法,包括基座、振动工作台、龙门架和主轴箱,所述龙门架滑动安装在基座上,主轴箱安装在龙门架上,在主轴箱的主轴末端设置有用于磨削木材的磨轮,所述振动工作台设置在基座上,磨抛过程中振动工作台的振动电机带动上平台产生上下振动,上平台上的工件也随之产生振动,使磨轮和工件之间产生纵向离合运动,通过纵向离合运动使磨轮的磨削丝能够深入工件的凹缝中,并将凹缝中的木屑带出,从而提升对凹缝的磨抛效果。