
一种无人机捕获装置.pdf

醉香****mm


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种无人机捕获装置.pdf
本发明提供了一种无人机捕获装置,包括转盘,设置于转盘上的基座,自基座对称设置的两个支撑杆,支撑杆的顶部设置两个上下布置并能够围绕设置在支撑杆上的转动轴转动的摆杆,上下布置的两个摆杆之间设置与支撑杆垂直设置的支架,支架的末端铰接两个上下布置并与摆杆铰接的第一磁流变阻尼器,摆杆远离支撑杆的一端端部吊装阻拦网,另一端端部与第一磁流变阻尼器铰接;基座设置底部转动且顶部设置连接块的伸缩装置,连接块两端分别铰接一贯穿支撑杆的底部所开设条状通孔的拉杆。通过发明所揭示的无人机捕获装置,实现了可转动地对无人机的捕获及回收操
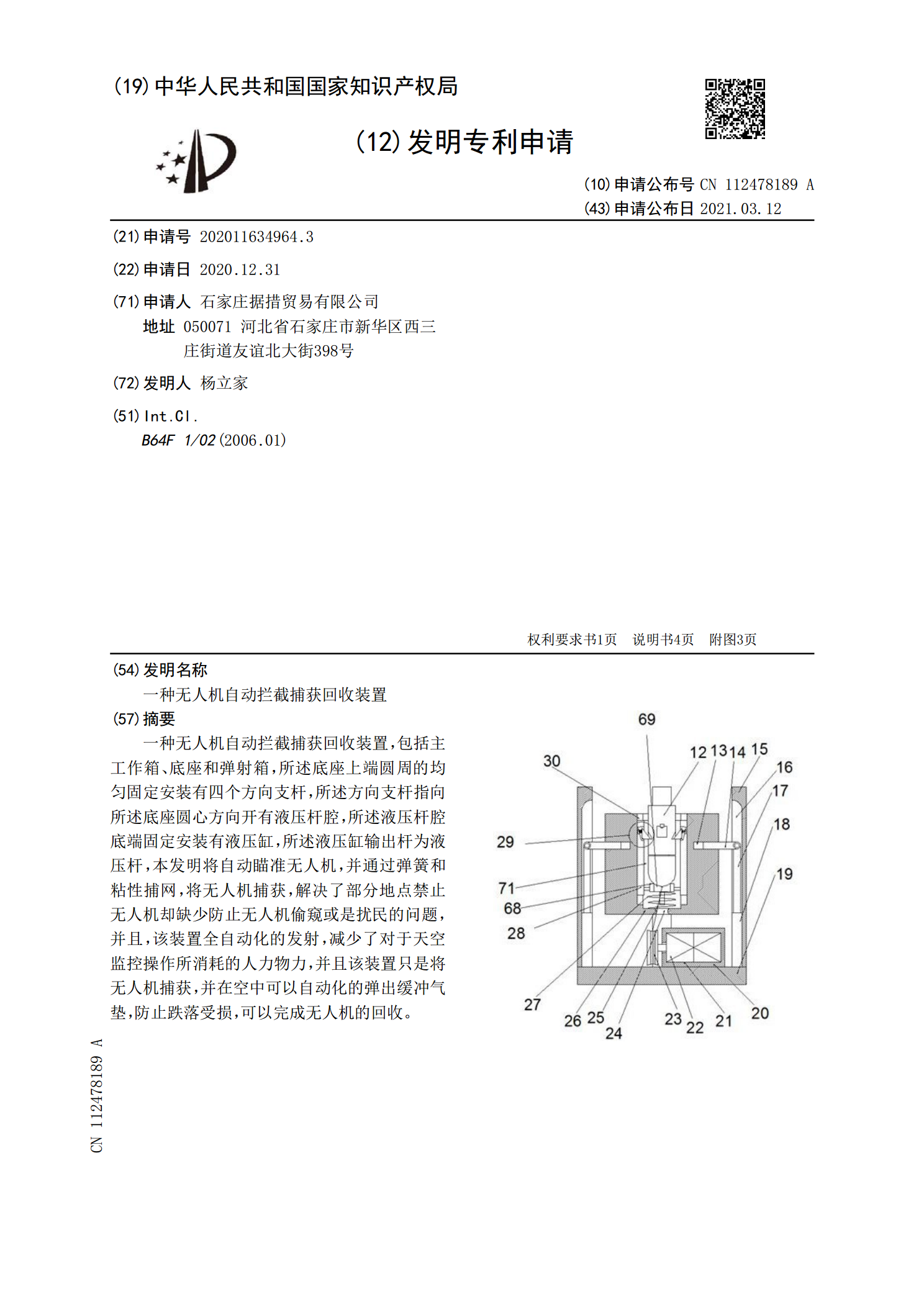
一种无人机自动拦截捕获回收装置.pdf
一种无人机自动拦截捕获回收装置,包括主工作箱、底座和弹射箱,所述底座上端圆周的均匀固定安装有四个方向支杆,所述方向支杆指向所述底座圆心方向开有液压杆腔,所述液压杆腔底端固定安装有液压缸,所述液压缸输出杆为液压杆,本发明将自动瞄准无人机,并通过弹簧和粘性捕网,将无人机捕获,解决了部分地点禁止无人机却缺少防止无人机偷窥或是扰民的问题,并且,该装置全自动化的发射,减少了对于天空监控操作所消耗的人力物力,并且该装置只是将无人机捕获,并在空中可以自动化的弹出缓冲气垫,防止跌落受损,可以完成无人机的回收。

无人机捕获及锁定装置.pdf
本发明公开了一种无人机捕获及锁定装置,所述无人机捕获及锁定装置包括支撑板、夹持组件和动力组件,夹持组件和动力组件均设于支撑板上,夹持组件包括支撑部和夹手部,支撑部用于支撑无人机的支腿,且支撑部的顶面具有定位部,夹手部绕支撑部在锁紧位置和释放位置之间可转换,夹手部由释放位置向锁紧位置转换时,夹手部可转动以推动无人机的支腿至定位部处并锁紧无人机的支腿,夹手部由锁紧位置向释放位置转换时,夹手部可释放无人机的支腿,动力组件可驱动夹手部在锁紧位置和释放位置之间相互转换。本发明的无人机捕获及锁定装置能够精准捕获无人机
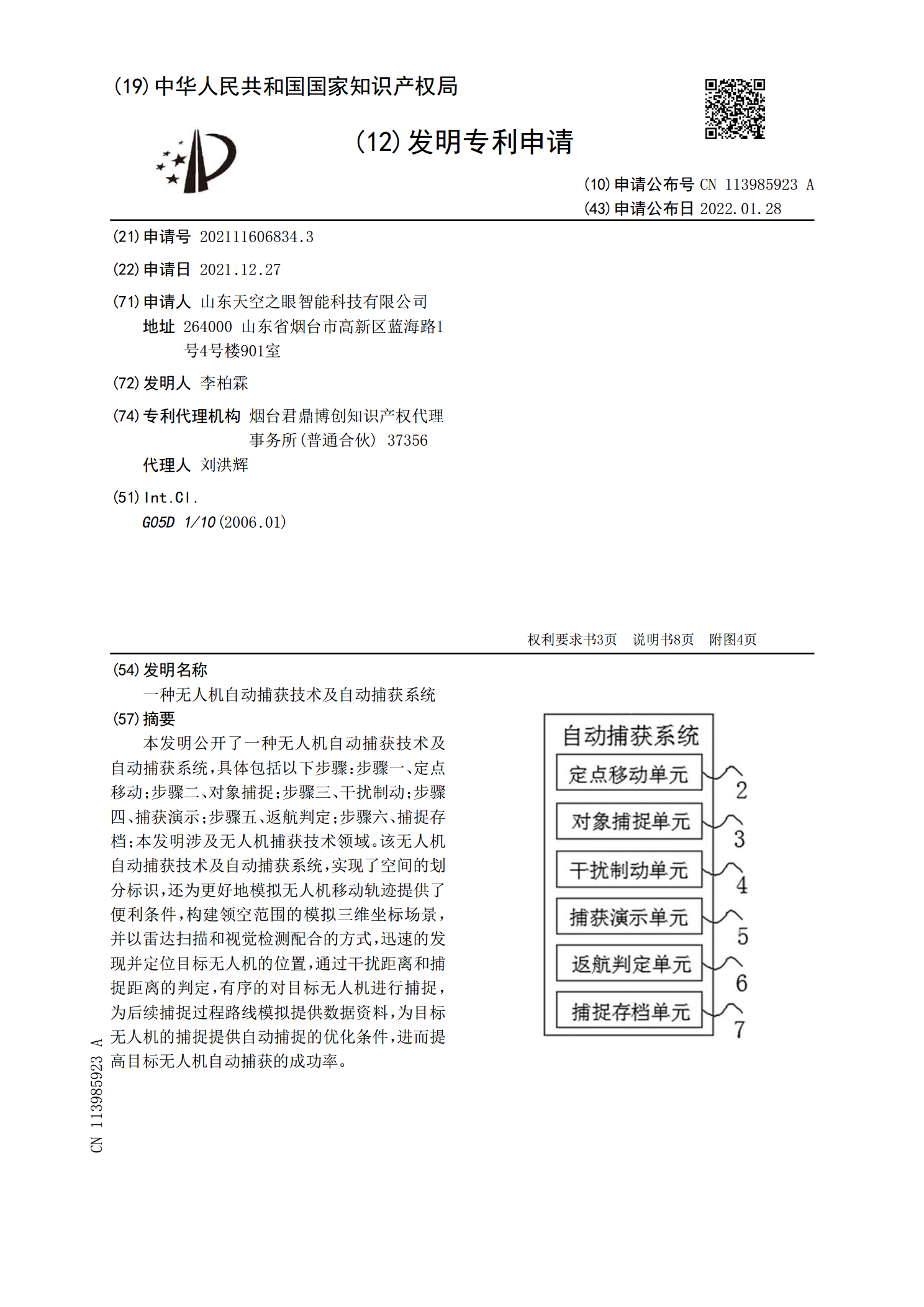
一种无人机自动捕获技术及自动捕获系统.pdf
本发明公开了一种无人机自动捕获技术及自动捕获系统,具体包括以下步骤:步骤一、定点移动;步骤二、对象捕捉;步骤三、干扰制动;步骤四、捕获演示;步骤五、返航判定;步骤六、捕捉存档;本发明涉及无人机捕获技术领域。该无人机自动捕获技术及自动捕获系统,实现了空间的划分标识,还为更好地模拟无人机移动轨迹提供了便利条件,构建领空范围的模拟三维坐标场景,并以雷达扫描和视觉检测配合的方式,迅速的发现并定位目标无人机的位置,通过干扰距离和捕捉距离的判定,有序的对目标无人机进行捕捉,为后续捕捉过程路线模拟提供数据资料,为目标无
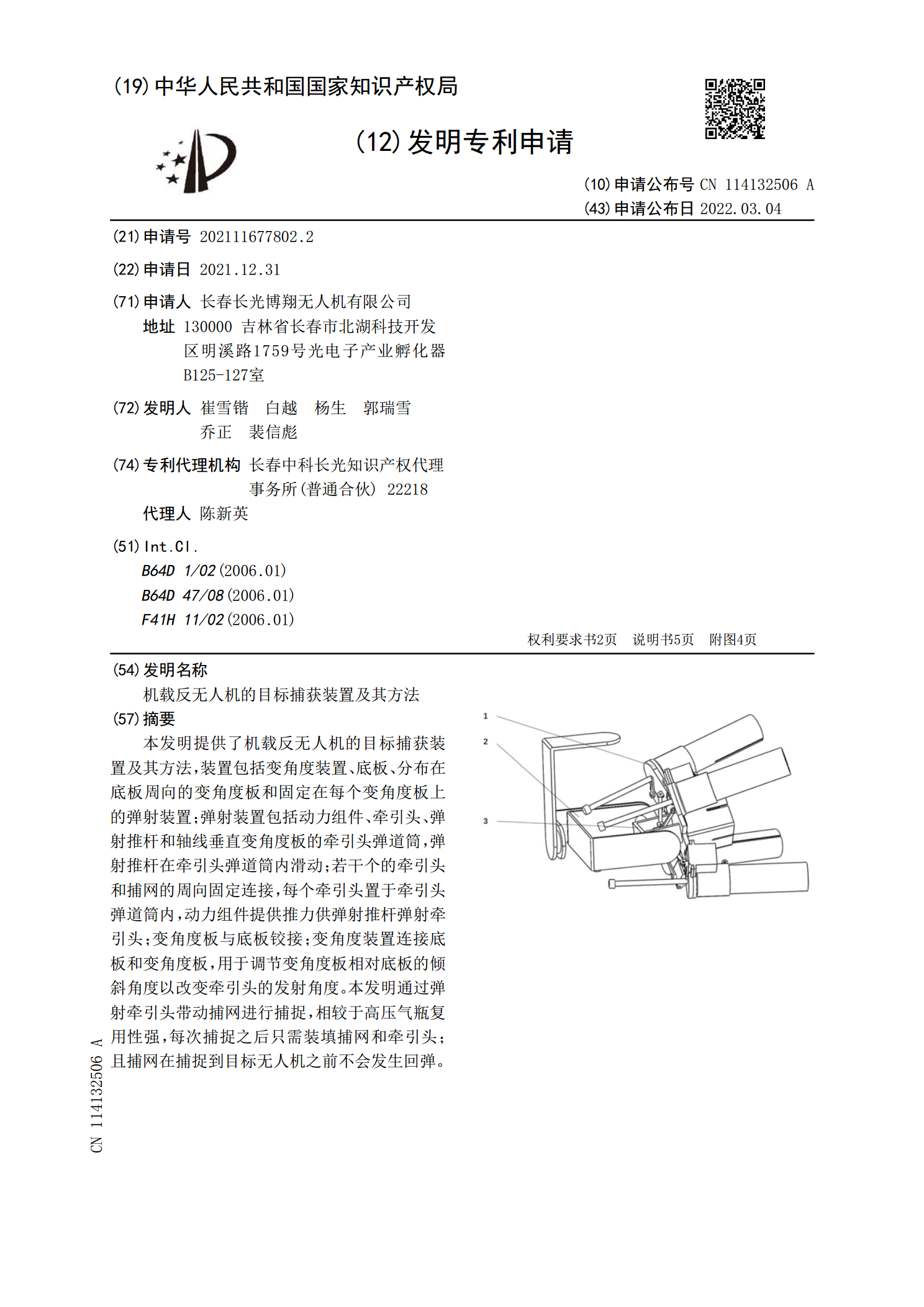
机载反无人机的目标捕获装置及其方法.pdf
本发明提供了机载反无人机的目标捕获装置及其方法,装置包括变角度装置、底板、分布在底板周向的变角度板和固定在每个变角度板上的弹射装置;弹射装置包括动力组件、牵引头、弹射推杆和轴线垂直变角度板的牵引头弹道筒,弹射推杆在牵引头弹道筒内滑动;若干个的牵引头和捕网的周向固定连接,每个牵引头置于牵引头弹道筒内,动力组件提供推力供弹射推杆弹射牵引头;变角度板与底板铰接;变角度装置连接底板和变角度板,用于调节变角度板相对底板的倾斜角度以改变牵引头的发射角度。本发明通过弹射牵引头带动捕网进行捕捉,相较于高压气瓶复用性强,每