
一种矿井水陆两栖救援智能机器人.pdf

Ke****67

1/8
2/8
3/8

4/8
5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种矿井水陆两栖救援智能机器人.pdf
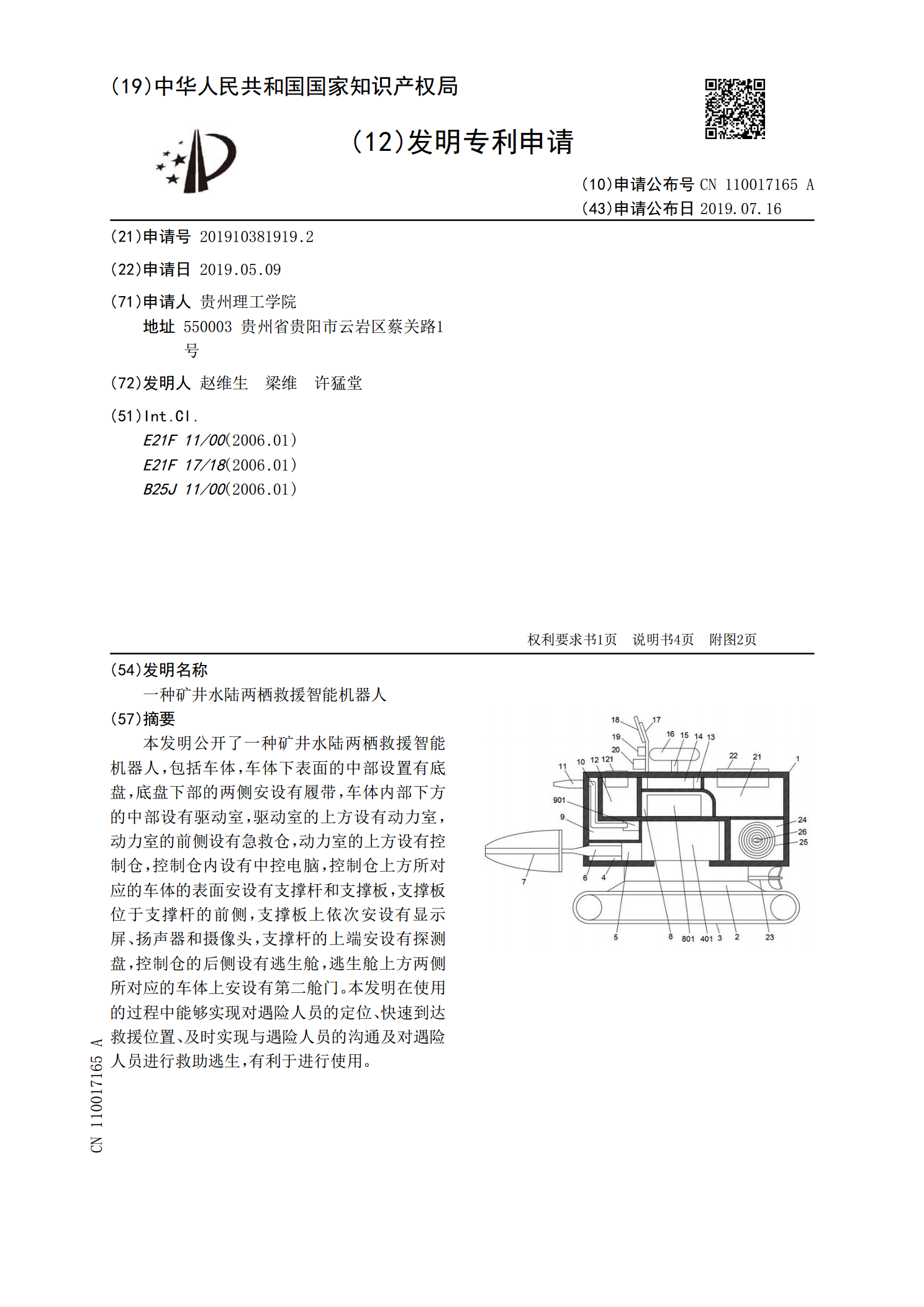
本发明公开了一种矿井水陆两栖救援智能机器人,包括车体,车体下表面的中部设置有底盘,底盘下部的两侧安设有履带,车体内部下方的中部设有驱动室,驱动室的上方设有动力室,动力室的前侧设有急救仓,动力室的上方设有控制仓,控制仓内设有中控电脑,控制仓上方所对应的车体的表面安设有支撑杆和支撑板,支撑板位于支撑杆的前侧,支撑板上依次安设有显示屏、扬声器和摄像头,支撑杆的上端安设有探测盘,控制仓的后侧设有逃生舱,逃生舱上方两侧所对应的车体上安设有第二舱门。本发明在使用的过程中能够实现对遇险人员的定位、快速到达救援位置、及时
一种智能水陆两栖机器人.pdf
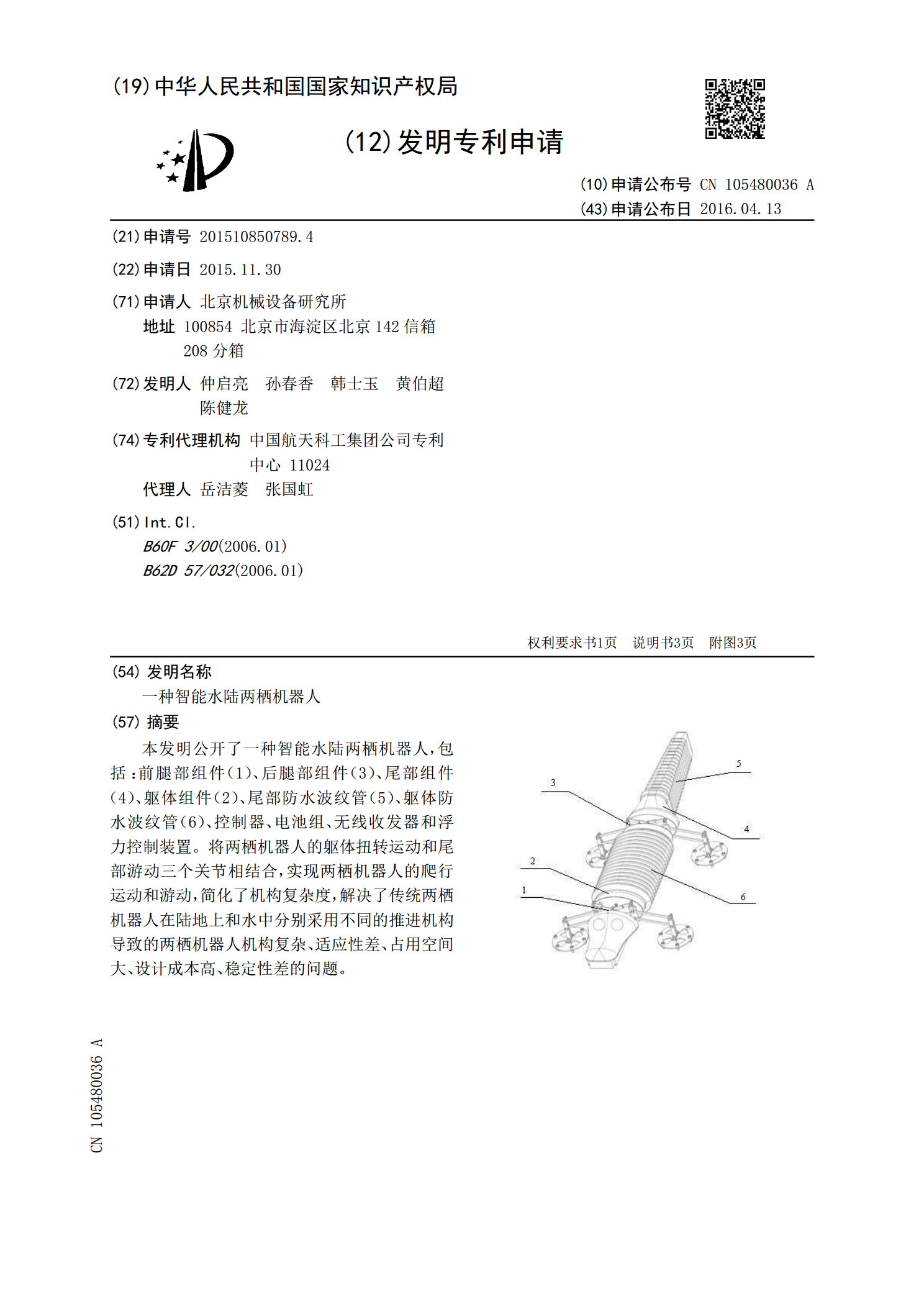
本发明公开了一种智能水陆两栖机器人,包括:前腿部组件(1)、后腿部组件(3)、尾部组件(4)、躯体组件(2)、尾部防水波纹管(5)、躯体防水波纹管(6)、控制器、电池组、无线收发器和浮力控制装置。将两栖机器人的躯体扭转运动和尾部游动三个关节相结合,实现两栖机器人的爬行运动和游动,简化了机构复杂度,解决了传统两栖机器人在陆地上和水中分别采用不同的推进机构导致的两栖机器人机构复杂、适应性差、占用空间大、设计成本高、稳定性差的问题。

一种水陆两栖机器人.pdf
本发明涉及机器人技术领域,目的是提供一种水陆两栖机器人,机动性好、制造成本低,体积小巧,适用范围广。上述机器人包括车体和设置于所述车体两侧的至少四个轮腿复合机构,所述轮腿复合机构包括内部中空的复合车轮和支撑腿,所述支撑腿的轴向与所述复合车轮的轴向垂直,所述支撑腿的上部与所述复合车轮的轴心可转动连接并且连通,所述复合车轮由车轮驱动组件驱动,所述支撑腿由腿部驱动件驱动,所述复合车轮内设置有叶轮,所述复合车轮的外侧具有进水口,所述支撑腿的底部具有出水口。本发明的解决了现有水陆两栖机器人结构复杂,制造成本高,而且

一种水陆两栖智能监控设备.pdf
本发明公开的一种水陆两栖智能监控设备,包括监控机,所述监控机内设有监控腔,所述监控腔内设有监控装置,所述监控装置包括滑动设于所述监控腔内下侧的监控腔滑块,本发明通过先对草原进行巡游再进行实时监控的方式,先将摄像头伸出监控机外,再通过水上行动机构在水面上进行水面上的实时监控,并且通过转向装置使摄像头能够进行三百六十度全方位监控水上的野生动物并能及时反馈情况,当需要进行草原上监控时,通过转换装置使监控机能在陆地上进行移动并监控草原动物的基本情况以及预防草原上的偷猎者和及时寻找需要进行救助的野生动物,省时省力,
一种水陆两栖勘探机器人.pdf
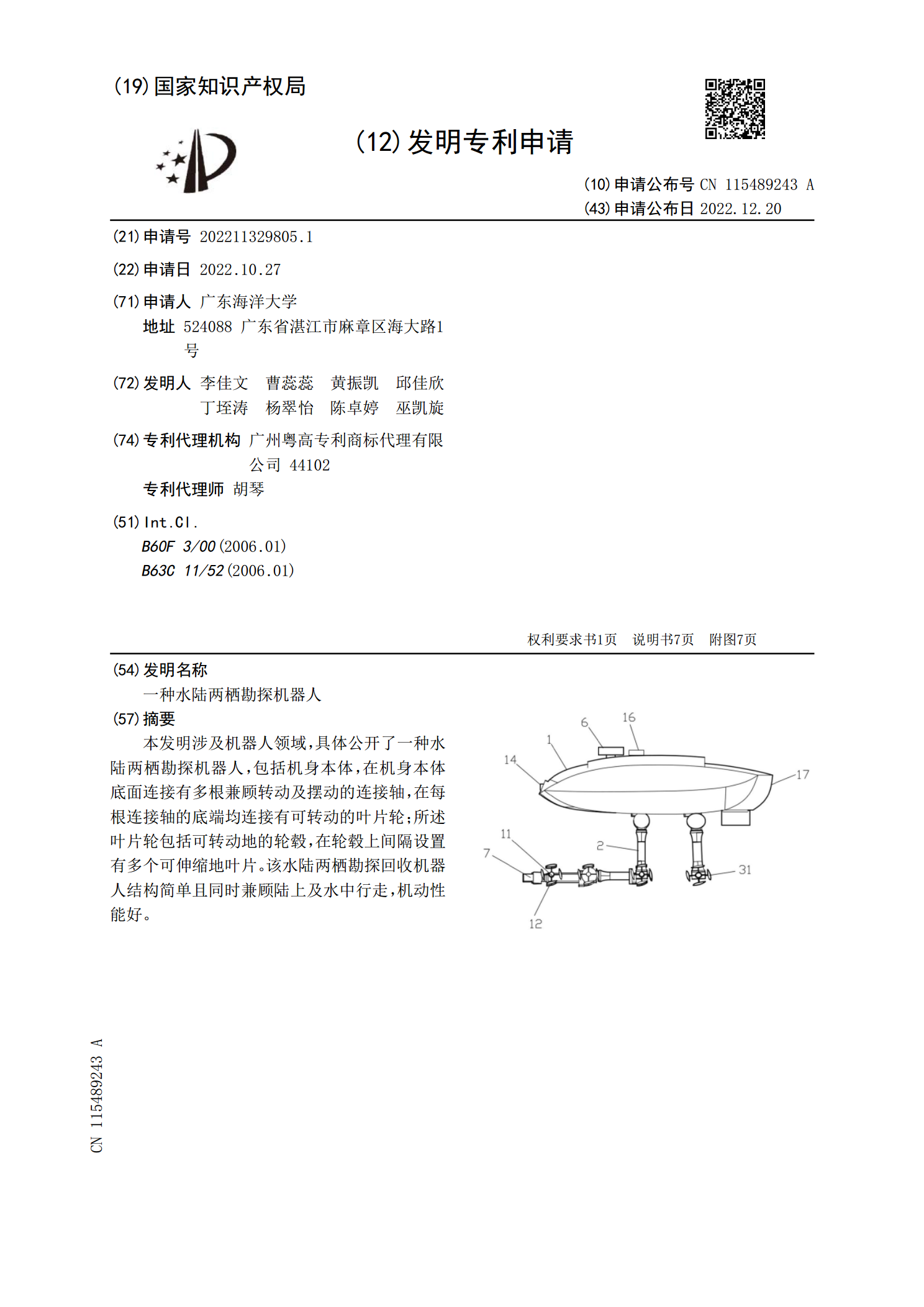
本发明涉及机器人领域,具体公开了一种水陆两栖勘探机器人,包括机身本体,在机身本体底面连接有多根兼顾转动及摆动的连接轴,在每根连接轴的底端均连接有可转动的叶片轮;所述叶片轮包括可转动地的轮毂,在轮毂上间隔设置有多个可伸缩地叶片。该水陆两栖勘探回收机器人结构简单且同时兼顾陆上及水中行走,机动性能好。