
一种水陆两栖勘探机器人.pdf

猫巷****忠娟


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种水陆两栖勘探机器人.pdf
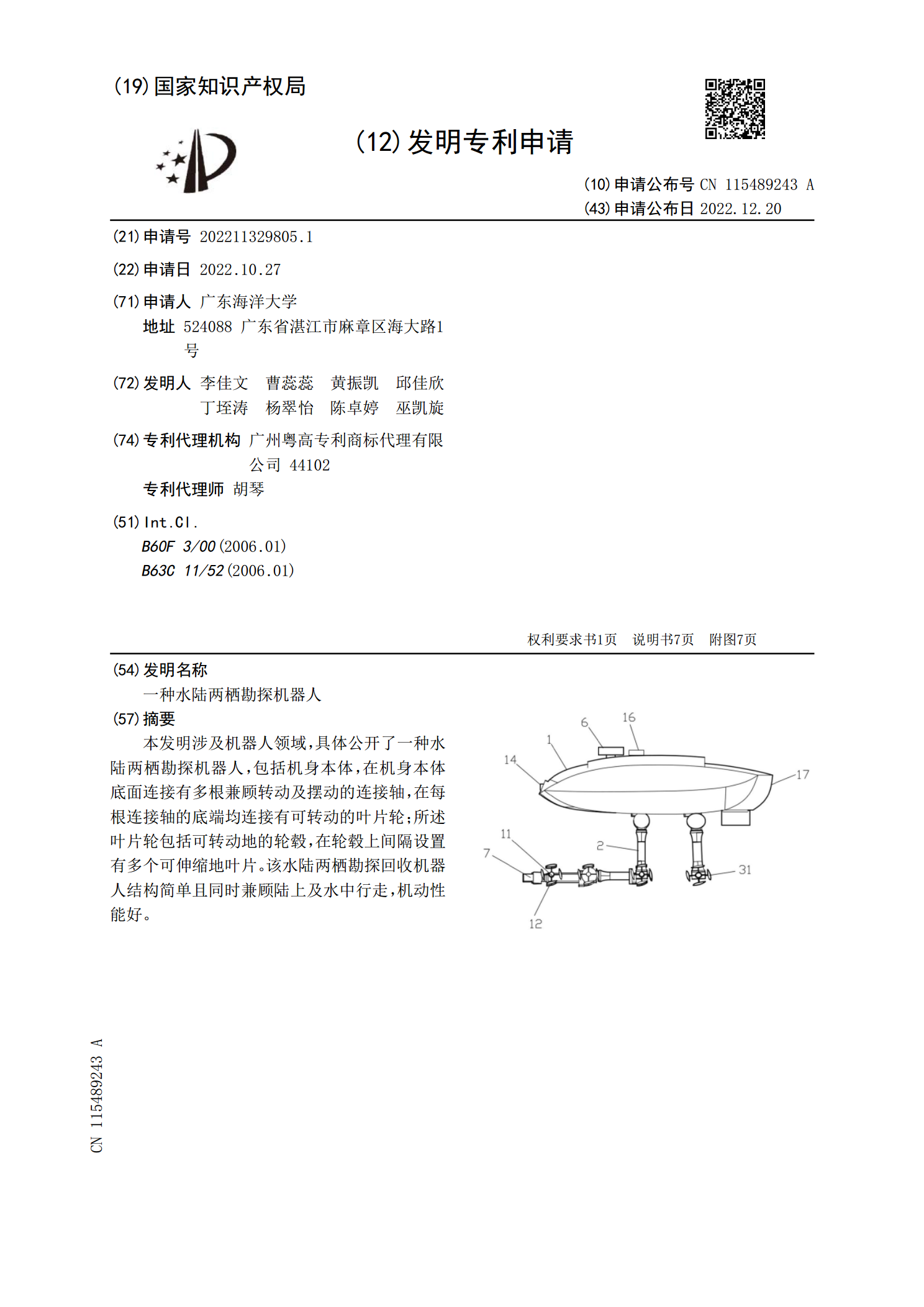
本发明涉及机器人领域,具体公开了一种水陆两栖勘探机器人,包括机身本体,在机身本体底面连接有多根兼顾转动及摆动的连接轴,在每根连接轴的底端均连接有可转动的叶片轮;所述叶片轮包括可转动地的轮毂,在轮毂上间隔设置有多个可伸缩地叶片。该水陆两栖勘探回收机器人结构简单且同时兼顾陆上及水中行走,机动性能好。

一种水陆两栖机器人.pdf
本发明涉及机器人技术领域,目的是提供一种水陆两栖机器人,机动性好、制造成本低,体积小巧,适用范围广。上述机器人包括车体和设置于所述车体两侧的至少四个轮腿复合机构,所述轮腿复合机构包括内部中空的复合车轮和支撑腿,所述支撑腿的轴向与所述复合车轮的轴向垂直,所述支撑腿的上部与所述复合车轮的轴心可转动连接并且连通,所述复合车轮由车轮驱动组件驱动,所述支撑腿由腿部驱动件驱动,所述复合车轮内设置有叶轮,所述复合车轮的外侧具有进水口,所述支撑腿的底部具有出水口。本发明的解决了现有水陆两栖机器人结构复杂,制造成本高,而且

一种水陆两栖轮形机器人.pdf
本发明公开了一种水陆两栖轮形机器人,它包括左轮和右轮,所述的左轮和右轮和中间的连接部,安装在连接部内部的连接架通过轴承机构与连接部连接,所述的轴承机构包括外轴承圈和滚珠,所述的连接架安装在外轴承圈内部,外轴承圈与连接部均具有半圆形凹槽,使得滚珠能够放入拼接在一起的凹槽中。

一种水陆两栖探测机器人.pdf
本发明属于探测设备技术领域,特别是涉及一种水陆两栖探测机器人。本发明的机器人适用于水陆两种环境,不仅能够解决在陆地及水下的自由行走,还能够实现水平面以及水底的探测,实现在陆地上、水平面以及在水底的SLAM。本发明的机器人整体由机壳、前后端盖构成一个密封防水壳体;密封壳外安装有四个驱动轮,每个驱动轮各自配有一个电机,放置于密封壳内;密封壳内装有固定底盘,底盘上安装有声呐、树莓派和用于数据传输的超远距离传输模块Xbee‑pro,树莓派内部移植ROS操作系统,内置SLAM算法,能够实现目标的检测和信息的采集,自
一种智能水陆两栖机器人.pdf
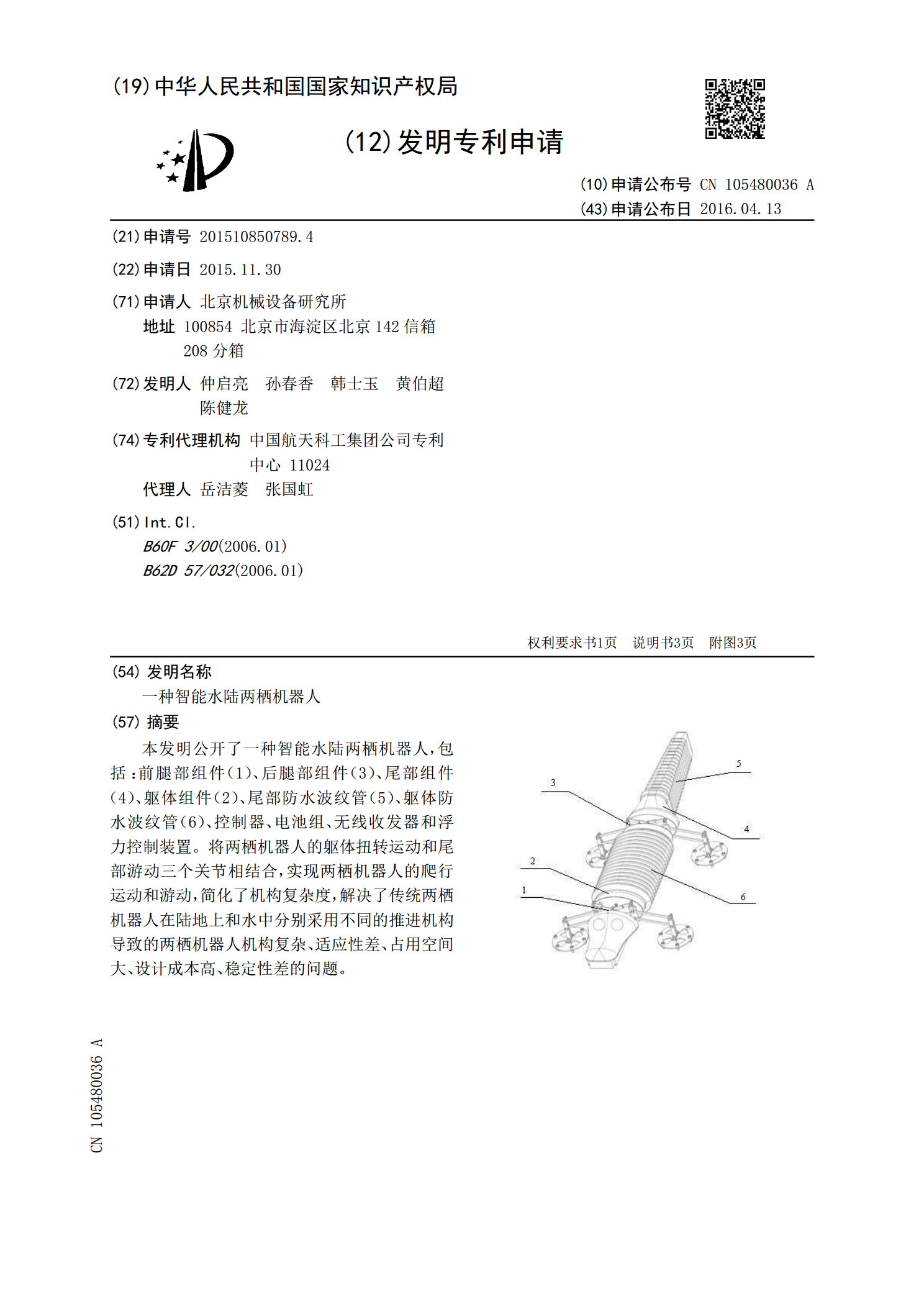
本发明公开了一种智能水陆两栖机器人,包括:前腿部组件(1)、后腿部组件(3)、尾部组件(4)、躯体组件(2)、尾部防水波纹管(5)、躯体防水波纹管(6)、控制器、电池组、无线收发器和浮力控制装置。将两栖机器人的躯体扭转运动和尾部游动三个关节相结合,实现两栖机器人的爬行运动和游动,简化了机构复杂度,解决了传统两栖机器人在陆地上和水中分别采用不同的推进机构导致的两栖机器人机构复杂、适应性差、占用空间大、设计成本高、稳定性差的问题。