
一种油壶在线检测剔除系统.pdf

小凌****甜蜜


1/10

2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种油壶在线检测剔除系统.pdf
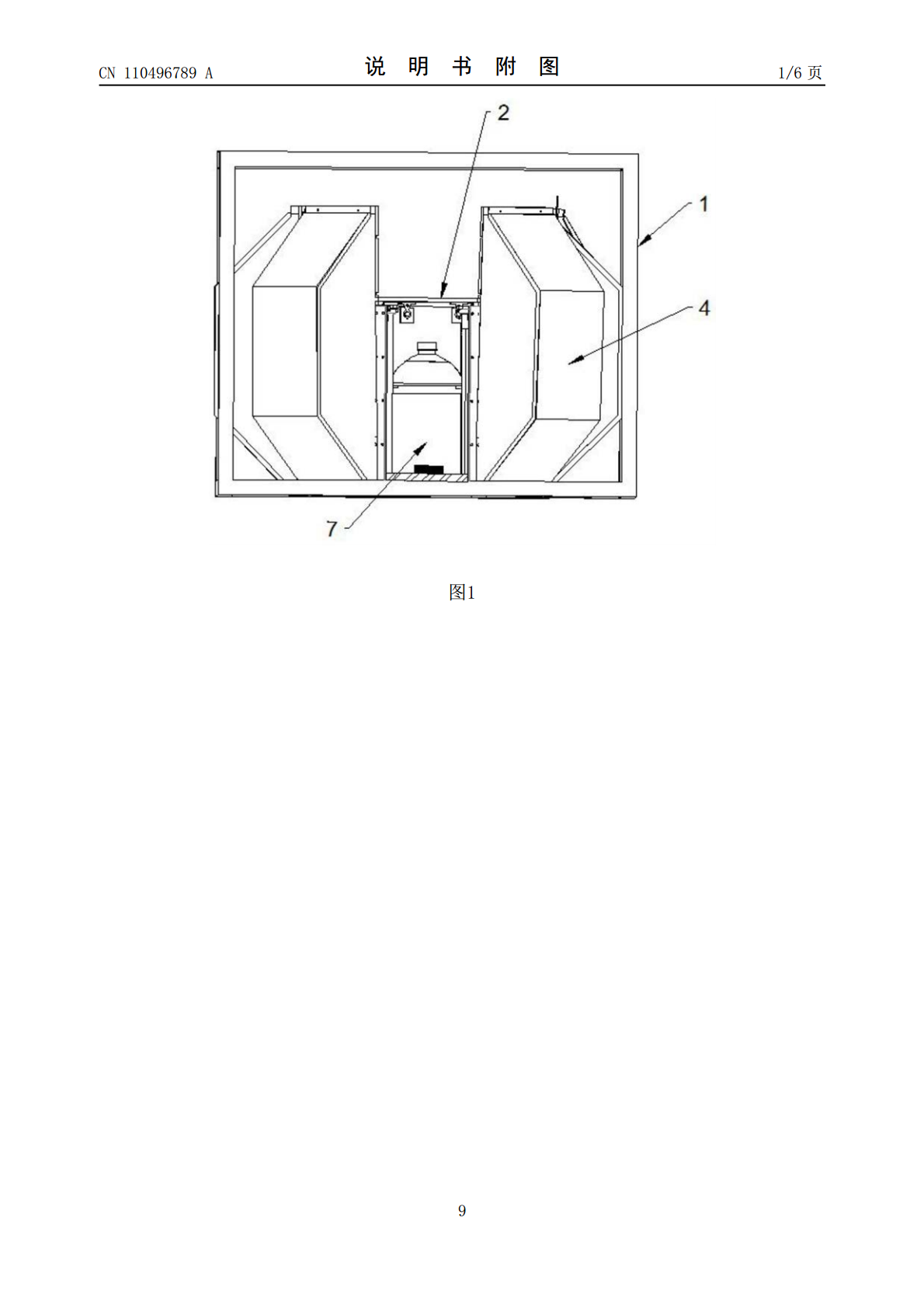
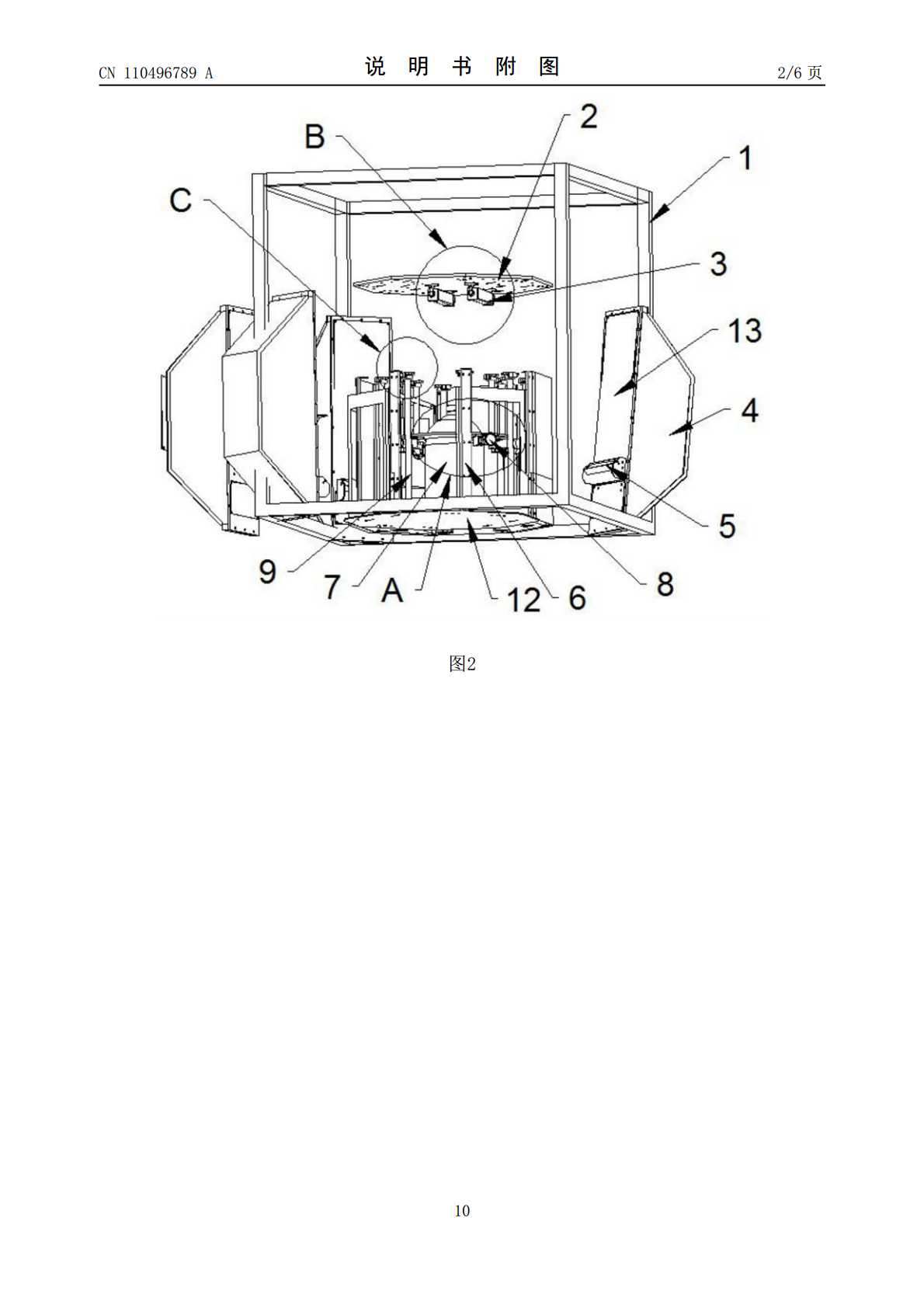
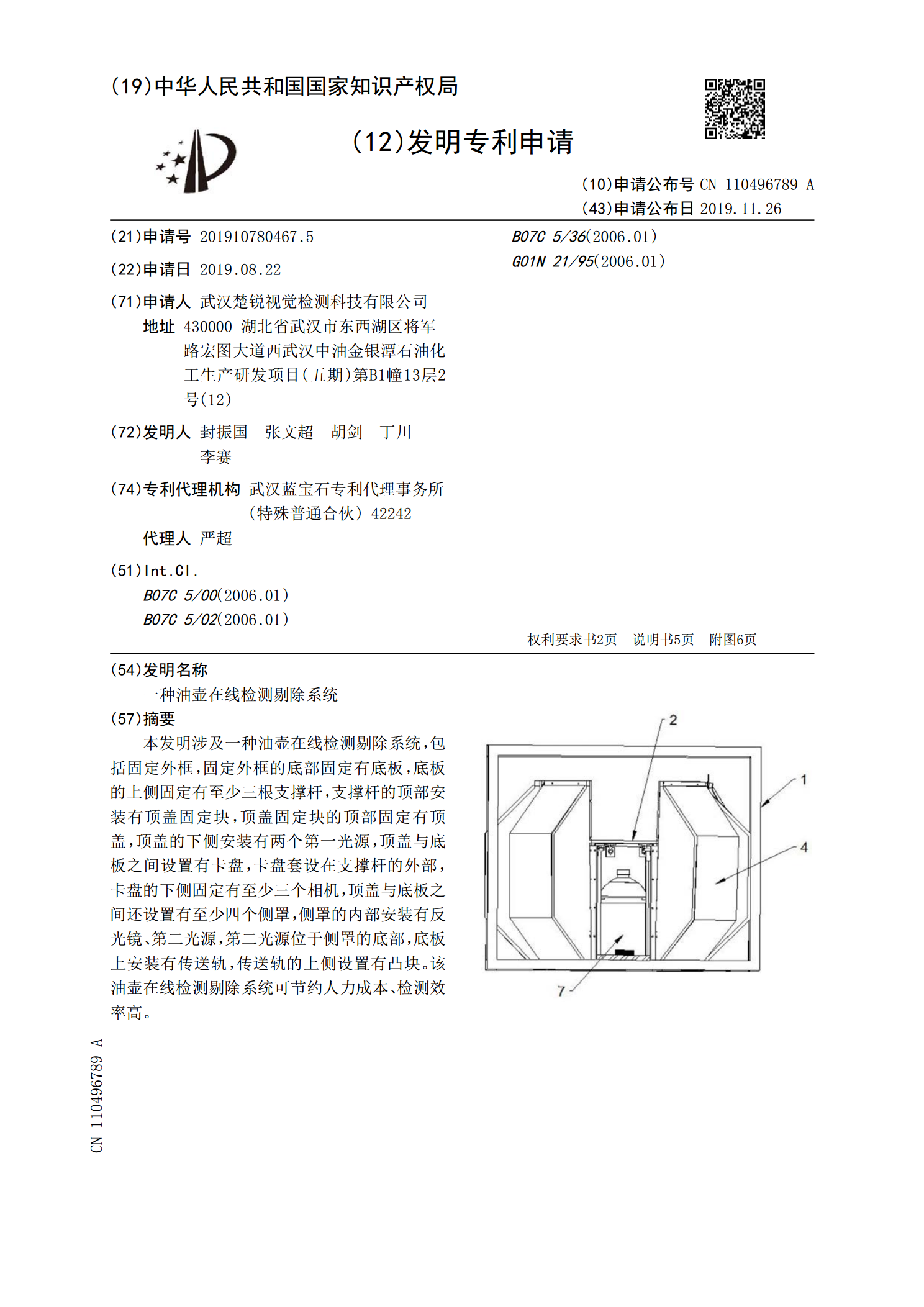
本发明涉及一种油壶在线检测剔除系统,包括固定外框,固定外框的底部固定有底板,底板的上侧固定有至少三根支撑杆,支撑杆的顶部安装有顶盖固定块,顶盖固定块的顶部固定有顶盖,顶盖的下侧安装有两个第一光源,顶盖与底板之间设置有卡盘,卡盘套设在支撑杆的外部,卡盘的下侧固定有至少三个相机,顶盖与底板之间还设置有至少四个侧罩,侧罩的内部安装有反光镜、第二光源,第二光源位于侧罩的底部,底板上安装有传送轨,传送轨的上侧设置有凸块。该油壶在线检测剔除系统可节约人力成本、检测效率高。

一种爆珠烟在线检测剔除系统及方法.pdf
本发明涉及一种爆珠烟在线检测剔除系统及方法,其系统包括光源组件、CCD成像组件、后台处理终端和气动剔除组件,光源组件和CCD成像组件分别沿着卷烟机内的分烟轮的径向相对间隔设置在分烟轮的一侧,分烟轮的外周侧壁上均匀间隔设有多个烟槽,且爆珠烟的烟嘴一端向靠近分烟轮的一侧伸出烟槽,且分烟轮转动时,所有爆珠烟的烟嘴顺次穿过光源组件和CCD成像组件之间的区域,气动剔除组件的出气端伸入至分烟轮的内壁。本发明通过CCD成像组件在光源组件的配合获取爆珠烟烟嘴图像信息,由后台处理终端判定爆珠烟的烟嘴内的爆珠是否合格,并在不

基于机器视觉的果料异物在线检测与剔除系统.docx
基于机器视觉的果料异物在线检测与剔除系统摘要随着出口市场的日益扩大,食品安全问题备受关注。果料异物是影响食品安全的一个重要因素。因此,本文提出了一种基于机器视觉的果料异物在线检测与剔除系统,以解决果料异物问题。该系统通过图像处理技术进行果料异物的识别,并结合机械臂技术进行异物的剔除。通过对系统的实验结果进行分析,证明该系统在果料异物检测和剔除方面具有较高的准确率和效率。关键词:机器视觉;果料异物;图像处理;机械臂;检测;剔除1.引言食品安全问题已经引起了广泛的关注。作为一个重要组成部分的果料异物,是严重危

一种药瓶剔除检测系统.pdf
本发明提出了一种药瓶剔除检测系统,包括机架,所述机架上平行无间隔设置有良品传送带和次品传送带,所述良品传送带上沿传送方向依次设有摄像头固定架、接近感应器和剔除机构;所述传感器固定架位于良品传送带的上方,摄像头固定架上设置有用于检测药瓶瓶盖是否旋好的摄像头,摄像头的图像数据端与控制器的图像数据端相连,所述接近感应器的发射部件和接收部件分别位于机架的两侧;发射部件的红外发射控制端与控制器的红外发射控制端相连,接收部件的红外数据端与控制器的红外数据端相连;当摄像头采集的药瓶为药瓶瓶盖未旋好,且接近感应器感应到药

一种红枣外观在线视觉检测及分级系统的剔除及分级装置.pdf
本发明涉及食品检测设备,具体地说是一种红枣外观在线视觉检测及分级系统的剔除及分级装置,包括伺服电机/旋转气缸、剔除/分级轮及第一支架,第一支架安装在红枣外观在线视觉检测及分级系统的辊传送带装置上,并与辊传送带装置的传送方向倾斜设置,伺服电机/旋转气缸安装在第一支架上,剔除/分级轮与伺服电机/旋转气缸的输出端相连,通过伺服电机/旋转气缸的驱动旋转,对辊传送带装置上的红枣进行剔除或分级。本发明可以将经在线检测装置检测的红枣自动进行分级,并将经在线检测装置检测不合格的红枣进行剔除,很好地解决了现有人工红枣外观检