
一种番茄串收的机械手末端装置及其采摘方法.pdf

梦影****主a


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种番茄串收的机械手末端装置及其采摘方法.pdf
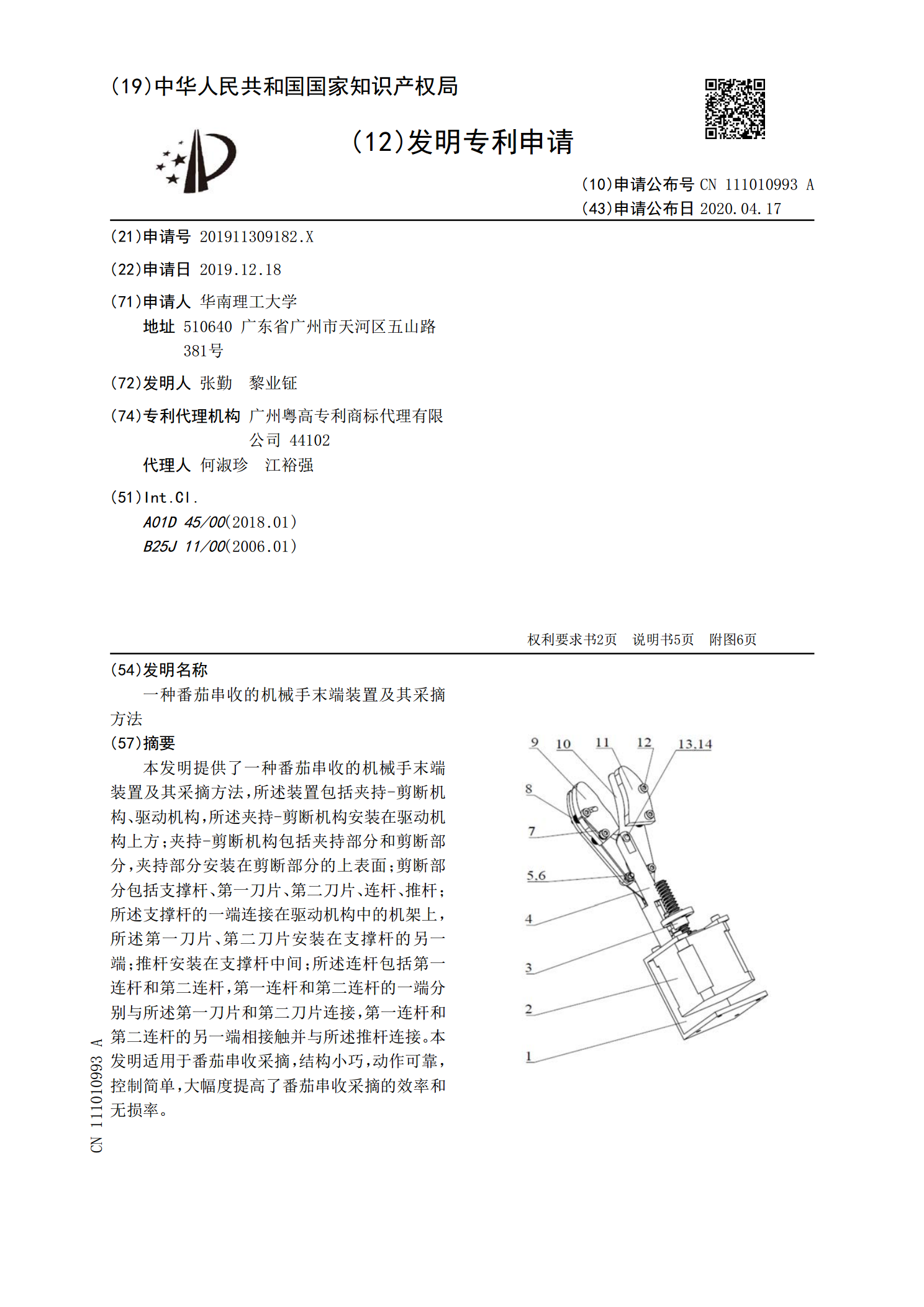
本发明提供了一种番茄串收的机械手末端装置及其采摘方法,所述装置包括夹持‑剪断机构、驱动机构,所述夹持‑剪断机构安装在驱动机构上方;夹持‑剪断机构包括夹持部分和剪断部分,夹持部分安装在剪断部分的上表面;剪断部分包括支撑杆、第一刀片、第二刀片、连杆、推杆;所述支撑杆的一端连接在驱动机构中的机架上,所述第一刀片、第二刀片安装在支撑杆的另一端;推杆安装在支撑杆中间;所述连杆包括第一连杆和第二连杆,第一连杆和第二连杆的一端分别与所述第一刀片和第二刀片连接,第一连杆和第二连杆的另一端相接触并与所述推杆连接。本发明适用
番茄果实串采摘末端执行器及其采摘方法.pdf
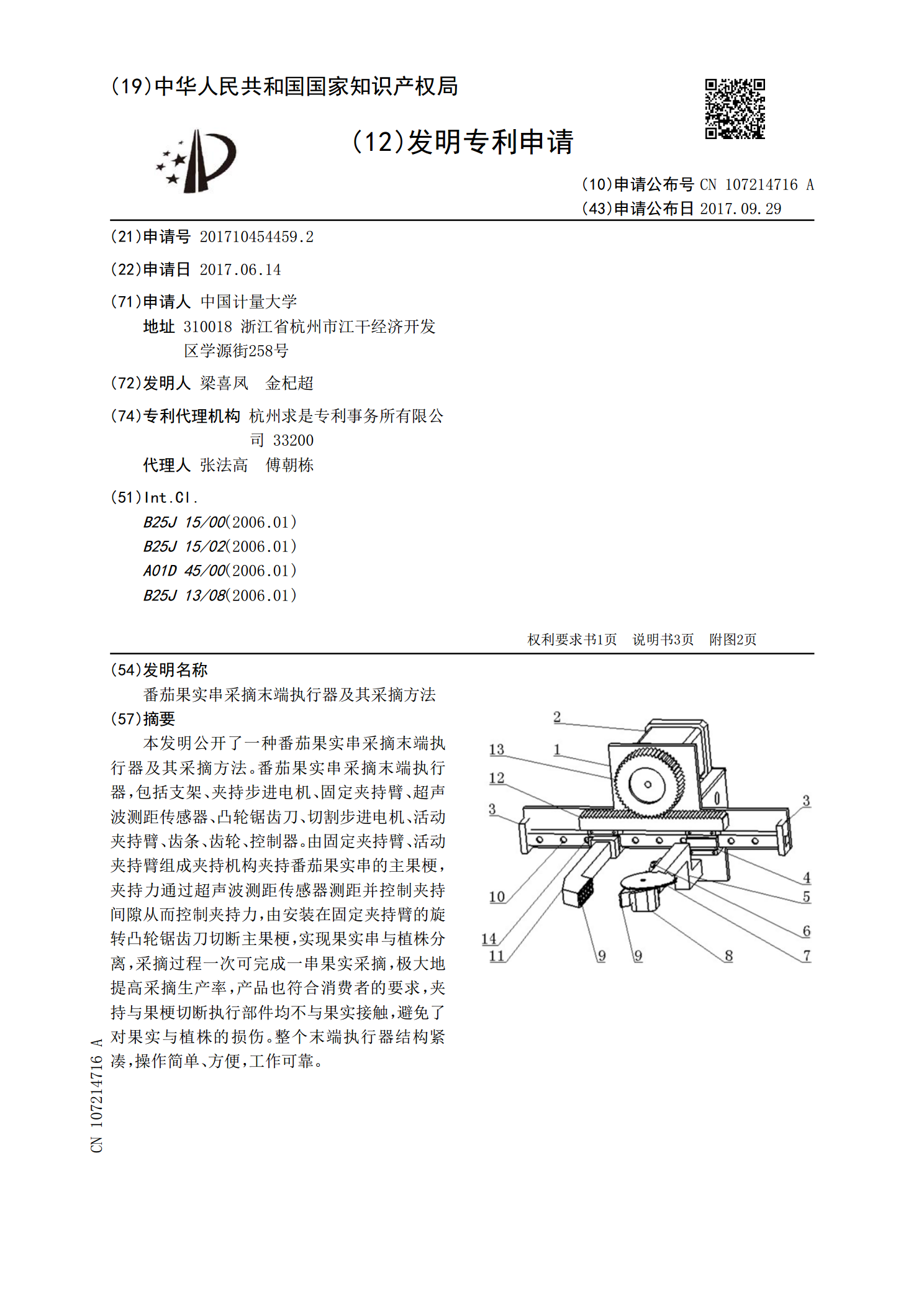
本发明公开了一种番茄果实串采摘末端执行器及其采摘方法。番茄果实串采摘末端执行器,包括支架、夹持步进电机、固定夹持臂、超声波测距传感器、凸轮锯齿刀、切割步进电机、活动夹持臂、齿条、齿轮、控制器。由固定夹持臂、活动夹持臂组成夹持机构夹持番茄果实串的主果梗,夹持力通过超声波测距传感器测距并控制夹持间隙从而控制夹持力,由安装在固定夹持臂的旋转凸轮锯齿刀切断主果梗,实现果实串与植株分离,采摘过程一次可完成一串果实采摘,极大地提高采摘生产率,产品也符合消费者的要求,夹持与果梗切断执行部件均不与果实接触,避免了对果实与

一种非接触式串番茄自动采摘机械手及采摘方法.pdf
本发明属于农业果蔬自动化采摘机器人技术领域,具体涉及一种非接触式串番茄自动采摘机械手及采摘方法。通过相机实时识别番茄串信息,通过整串果实的信息来推导位于番茄串上方合适的切割点位置,同时获取到执行器在切割点处的位置和姿态信息,控制多关节机械臂运动,将采摘机械手移动至指定采摘位置。采摘机械手的执行器从番茄串下方最低点的果实中心对准,自下往上移动套入果实,到达果梗剪切位置时,驱动七连杆仿人手机构剪切果梗,之后夹住番茄串,控制机械臂将番茄串放到指定的收集筐中,完成采摘任务。

一种簇状番茄粉果采摘机械手及其采摘方法.pdf
本发明提供了一种簇状番茄粉果采摘机械手及其采摘方法,包括壳体、直线行走机构、螺母座和采摘单元,所述壳体内安装直线行走机构,所述螺母座与直线行走机构连接,通过直线行走机构使螺母座直线运动;所述螺母座上分布若干采摘单元,每一所述采摘单元包括第一连杆、第二连杆和采摘手,所述第一连杆一端与螺母座铰接,所述第一连杆另一端与第二连杆中间铰接,所述第二连杆一端与壳体铰接,所述第二连杆另一端穿过壳体与采摘手连接,通过螺母座的直线运动,使采摘手姿态发生变化;所述壳体底部与回转手臂连接,用于使壳体转动。本发明能够实现对被采摘

番茄采摘机械手.docx
36目录摘要3第一章绪论51.1研究的目的与意义51.2国内外在该方面的研究现状61.2.1国外研究现状61.2.2国内研究现状71.3主要内容81.4设计采摘机械手的要求8第二章切割装置的设计82.1采摘方式的选择82.2切割装置的结构设计92.2.1切割刀片的设计92.2.2驱动方式的选择112.2.3切割装置的受力分析112.2.4气压缸与基本参数的确定122.4切割装置的固定与定位152.4.1切割装置的定位152.4.2切割装置的固定162.5本章小结17第3章软体手指密封与连接固定结构设计17