
一种空间捕获对接机构.pdf

是你****芹呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种空间捕获对接机构.pdf
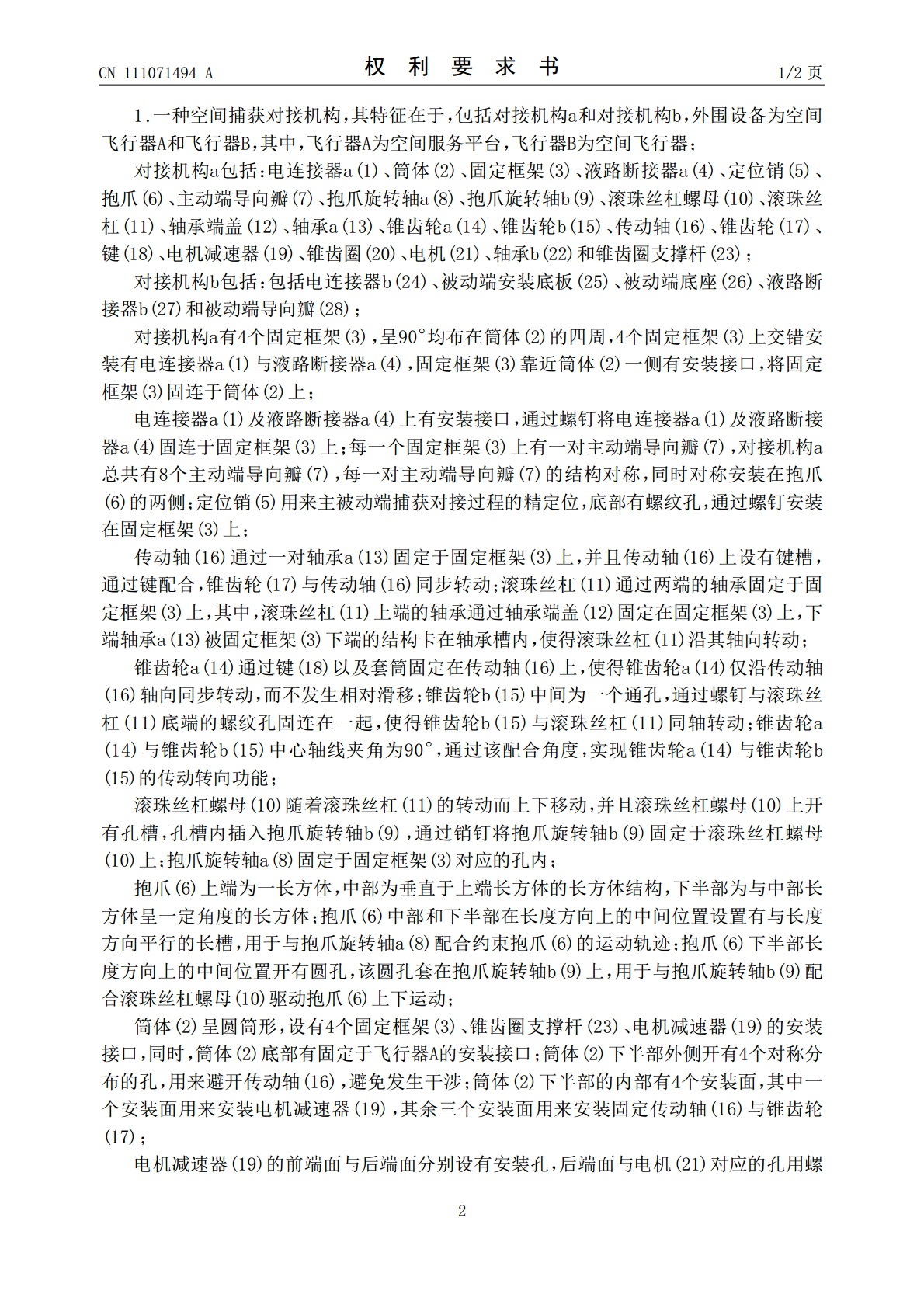
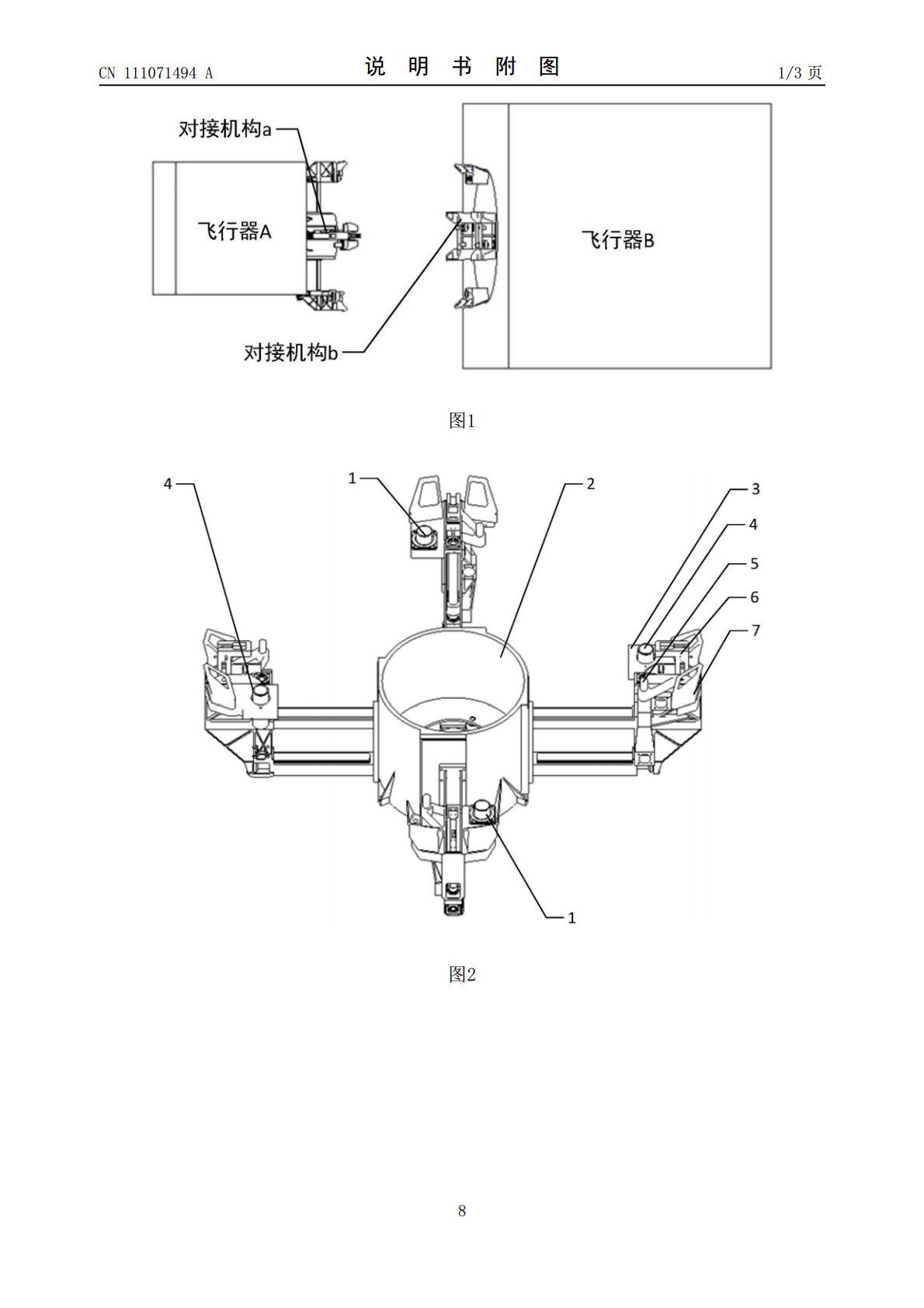
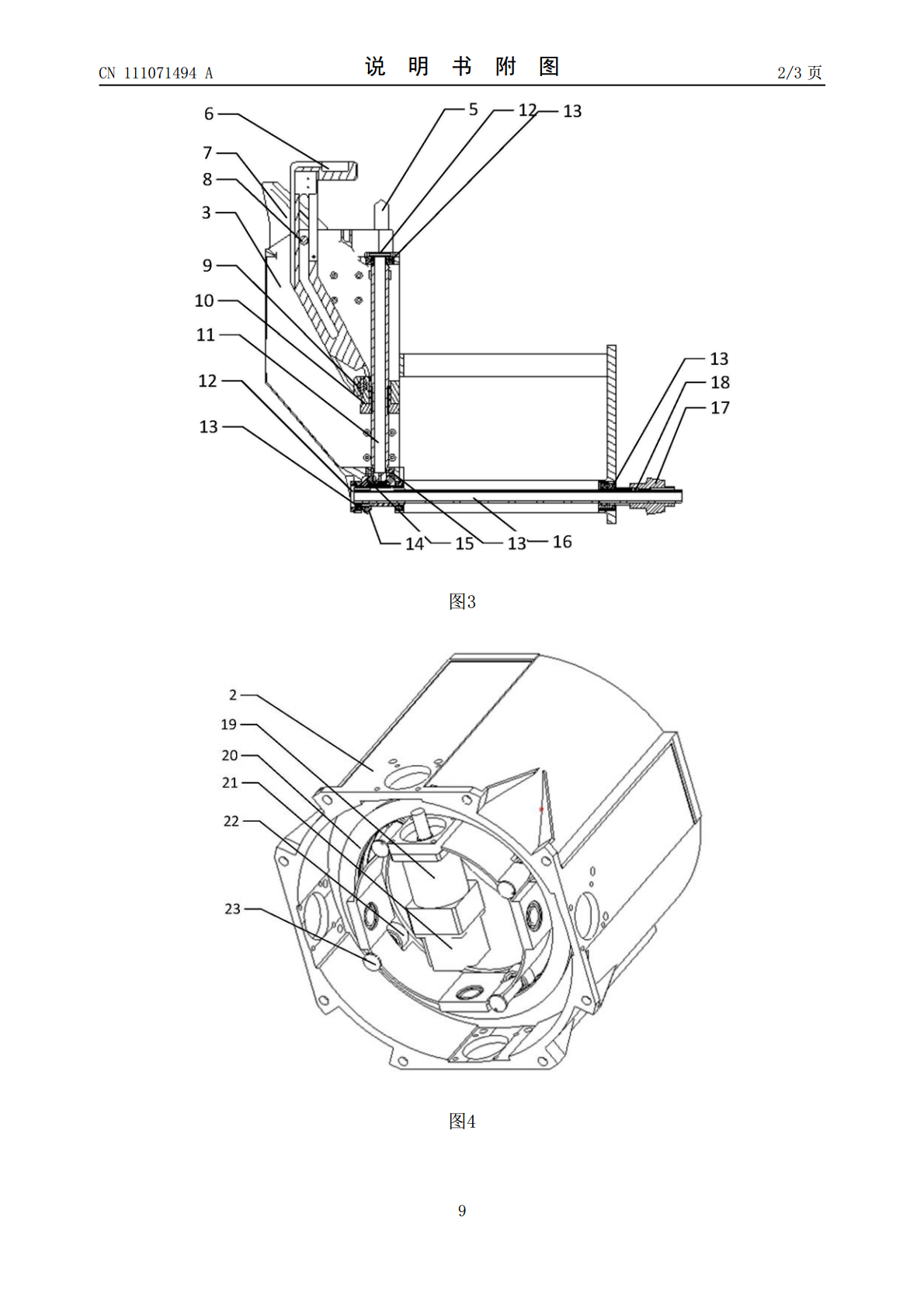
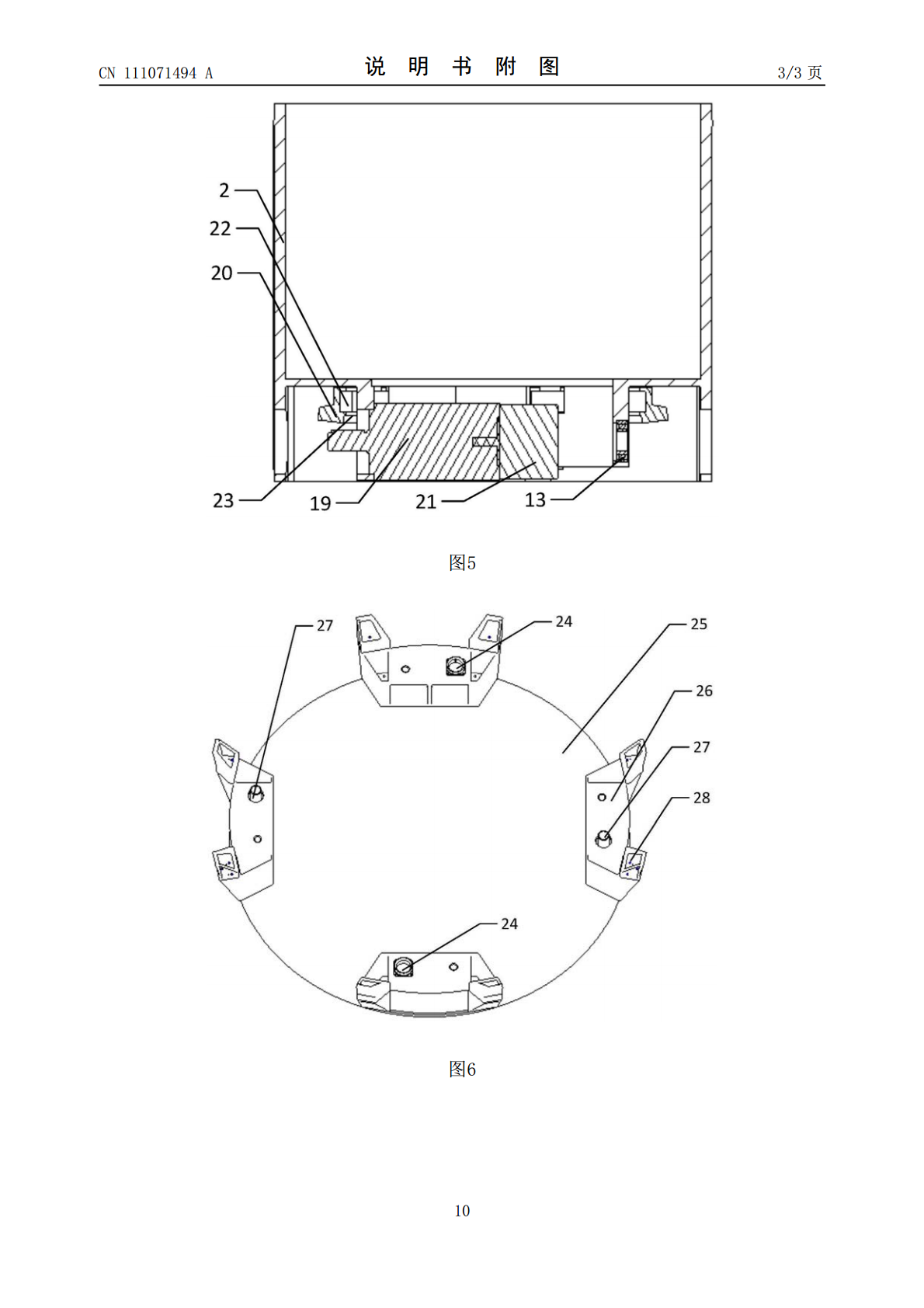
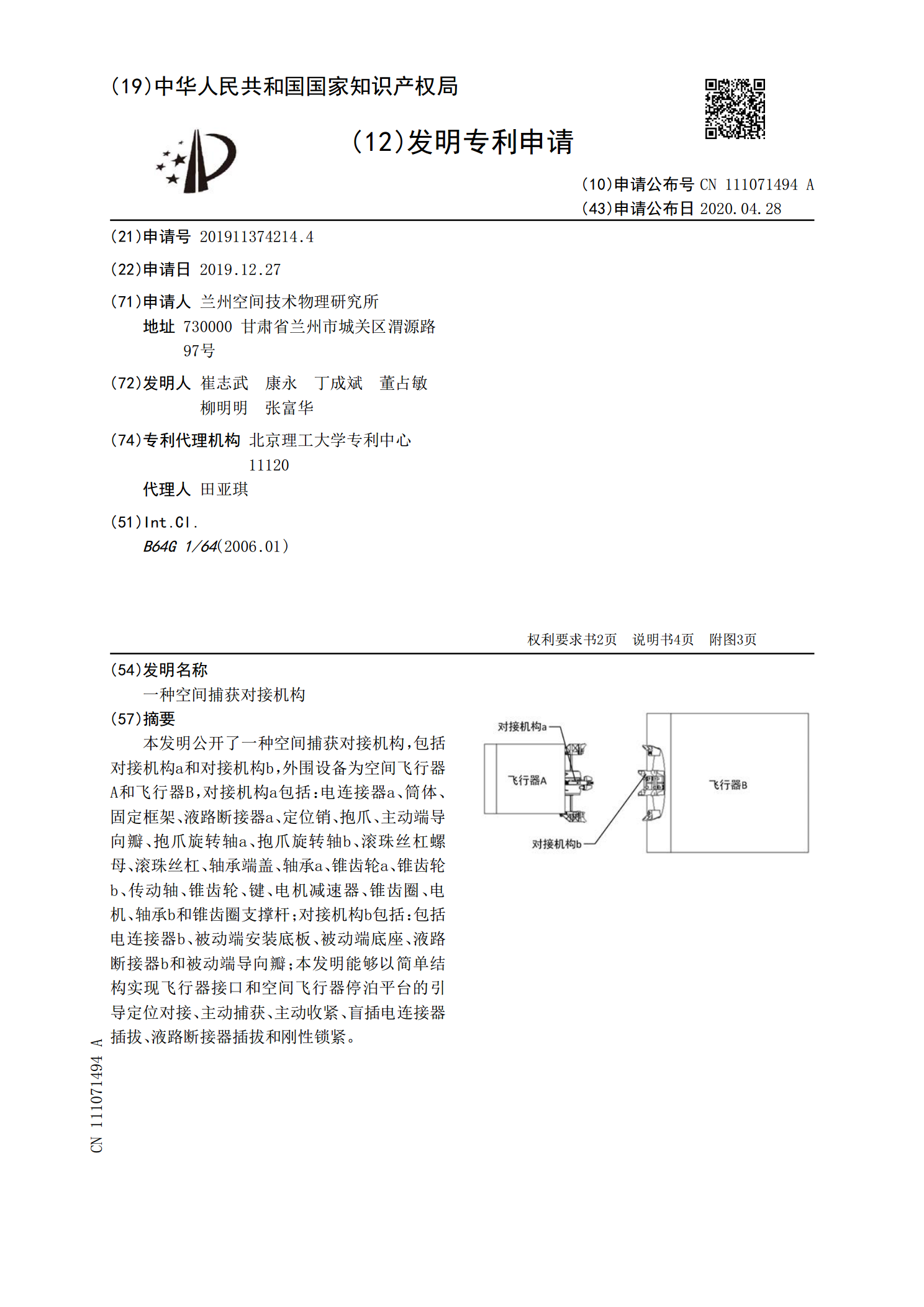
本发明公开了一种空间捕获对接机构,包括对接机构a和对接机构b,外围设备为空间飞行器A和飞行器B,对接机构a包括:电连接器a、筒体、固定框架、液路断接器a、定位销、抱爪、主动端导向瓣、抱爪旋转轴a、抱爪旋转轴b、滚珠丝杠螺母、滚珠丝杠、轴承端盖、轴承a、锥齿轮a、锥齿轮b、传动轴、锥齿轮、键、电机减速器、锥齿圈、电机、轴承b和锥齿圈支撑杆;对接机构b包括:包括电连接器b、被动端安装底板、被动端底座、液路断接器b和被动端导向瓣;本发明能够以简单结构实现飞行器接口和空间飞行器停泊平台的引导定位对接、主动捕获、主
一种卫星对接捕获机构及空间分离释放与对接锁紧机构.pdf
本发明提供一种卫星对接捕获机构,包括环形主基座以及导引捕获环、导轨、主支撑杆、导向滑块、主弹簧、抬升限位器和锁紧机构;多个导轨沿环形主基座的径向设置,导引捕获环与环形主基座同轴,且导引捕获环的径向尺寸小于环形主基座的径向尺寸;导向滑块设置在导轨上且能够沿导轨的长度方向移动;主支撑杆的两端分别与导向滑块和导引捕获环的外壁铰接;主弹簧套接在导轨上,且位于环形主基座和导向滑块之间。本发明的卫星对接捕获机构,将导引捕获环通过导轨、支撑杆、导向滑块和弹簧设置在环形主基座上,结构简单、尺寸小且对接冲击力小,可用于可往

对接与转移一体式空间捕获机构.pdf
一种空间捕获机构,适用于轻小型飞行器的对接与转移,其特征在于,所述空间捕获机构包括多个相互独立的齿轮齿条抱爪机构,以对目标飞行器继续对接和转移。本发明实现了空间轨道上两飞行器的对接及对目标飞行器上样品容器的长距离转移。在空间站内有限的载荷空间、重量范围的条件下,在实现捕获目标飞行器的同时,将驱动机构有限的行程范围放大若干倍后把样品容器转移至指定位置。取得了结构紧凑、质量轻、行程长、捕获转移高度集成等有益效果。
一种对接环捕获锁紧机构及捕获锁紧方法.pdf
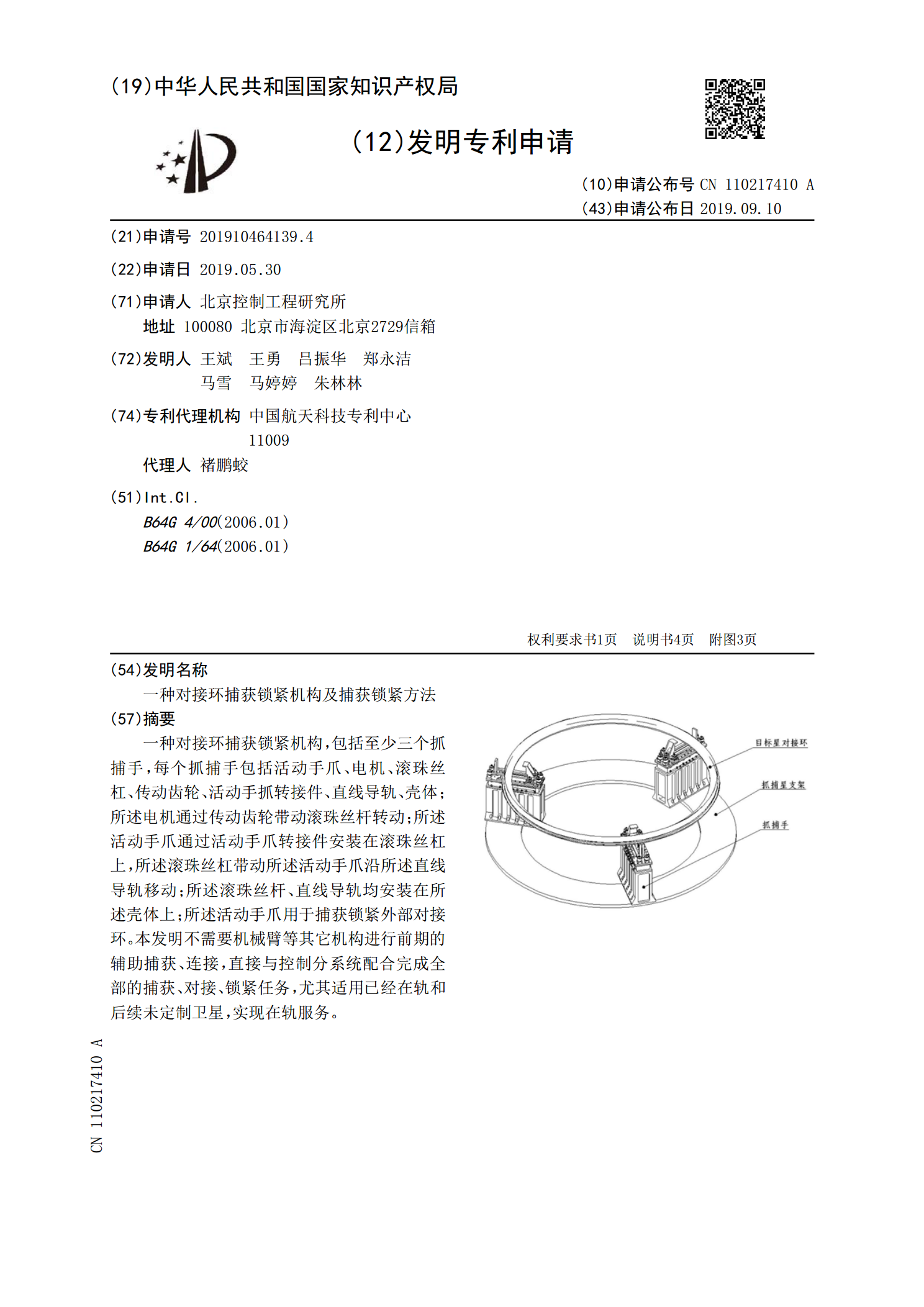
一种对接环捕获锁紧机构,包括至少三个抓捕手,每个抓捕手包括活动手爪、电机、滚珠丝杠、传动齿轮、活动手抓转接件、直线导轨、壳体;所述电机通过传动齿轮带动滚珠丝杆转动;所述活动手爪通过活动手爪转接件安装在滚珠丝杠上,所述滚珠丝杠带动所述活动手爪沿所述直线导轨移动;所述滚珠丝杆、直线导轨均安装在所述壳体上;所述活动手爪用于捕获锁紧外部对接环。本发明不需要机械臂等其它机构进行前期的辅助捕获、连接,直接与控制分系统配合完成全部的捕获、对接、锁紧任务,尤其适用已经在轨和后续未定制卫星,实现在轨服务。
一种捕获锁紧机构用对接试验装置.pdf
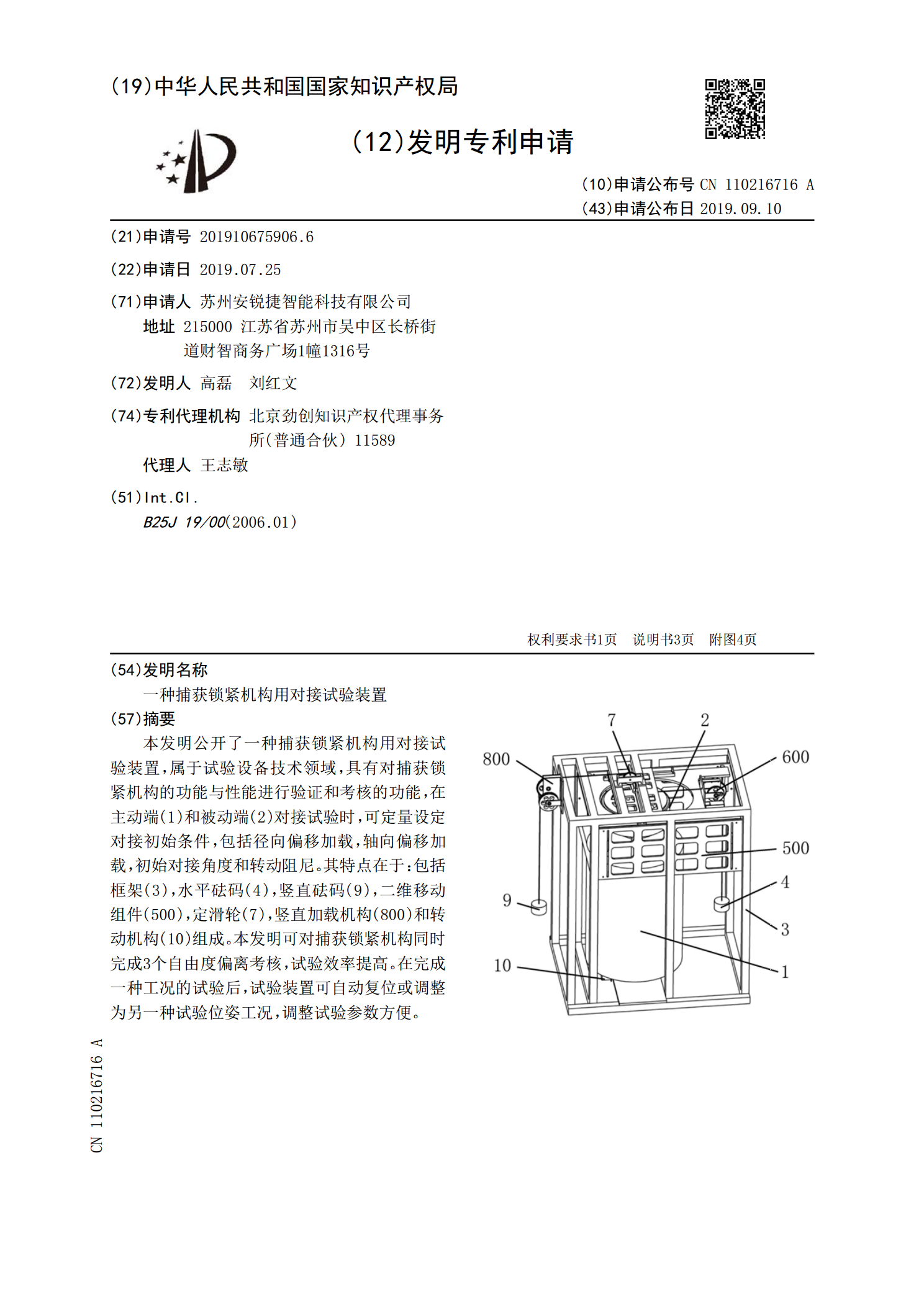
本发明公开了一种捕获锁紧机构用对接试验装置,属于试验设备技术领域,具有对捕获锁紧机构的功能与性能进行验证和考核的功能,在主动端(1)和被动端(2)对接试验时,可定量设定对接初始条件,包括径向偏移加载,轴向偏移加载,初始对接角度和转动阻尼。其特点在于:包括框架(3),水平砝码(4),竖直砝码(9),二维移动组件(500),定滑轮(7),竖直加载机构(800)和转动机构(10)组成。本发明可对捕获锁紧机构同时完成3个自由度偏离考核,试验效率提高。在完成一种工况的试验后,试验装置可自动复位或调整为另一种试验位姿