
一种电动助立助行器把手系统.pdf

努力****爱敏

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种电动助立助行器把手系统.pdf
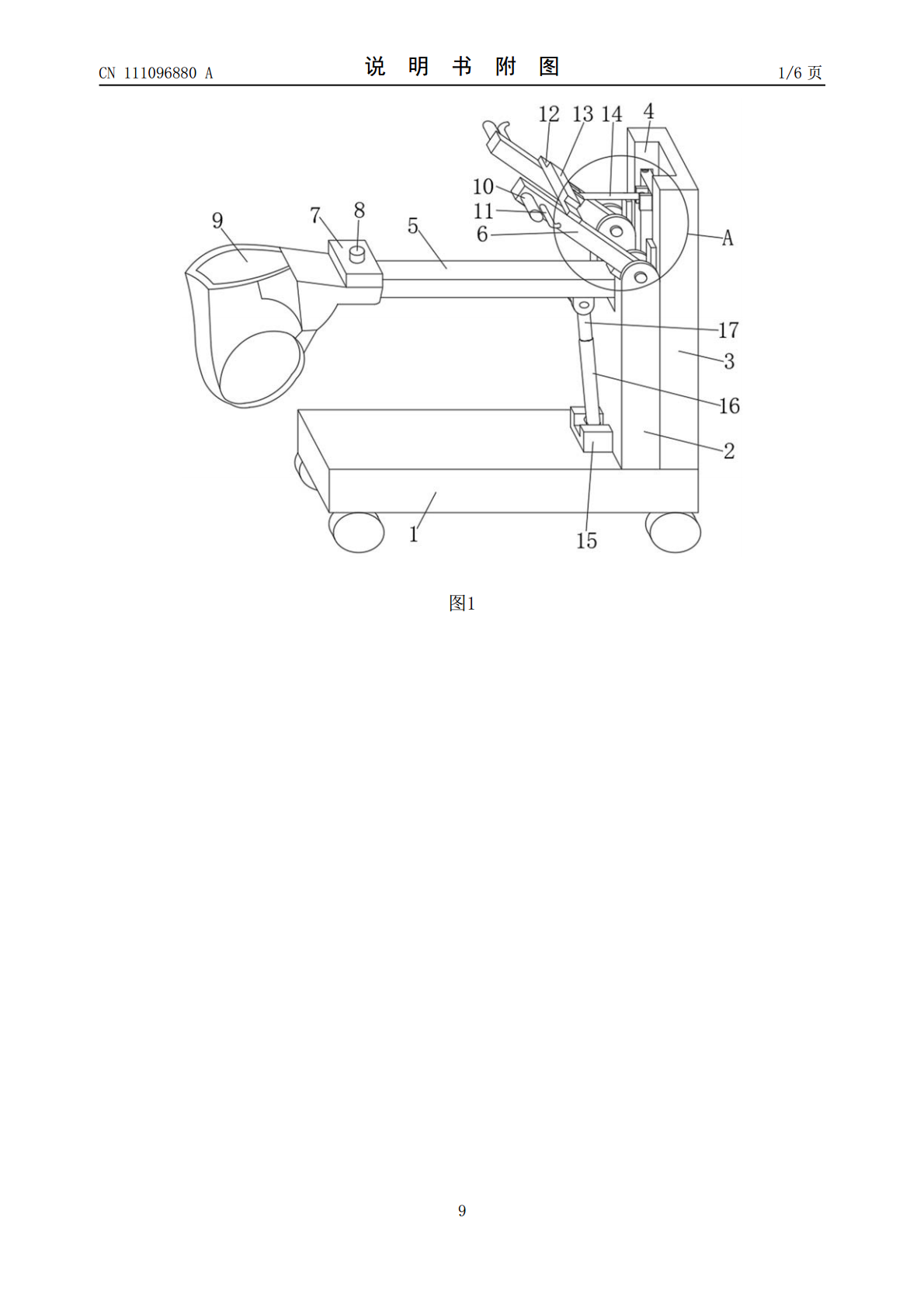
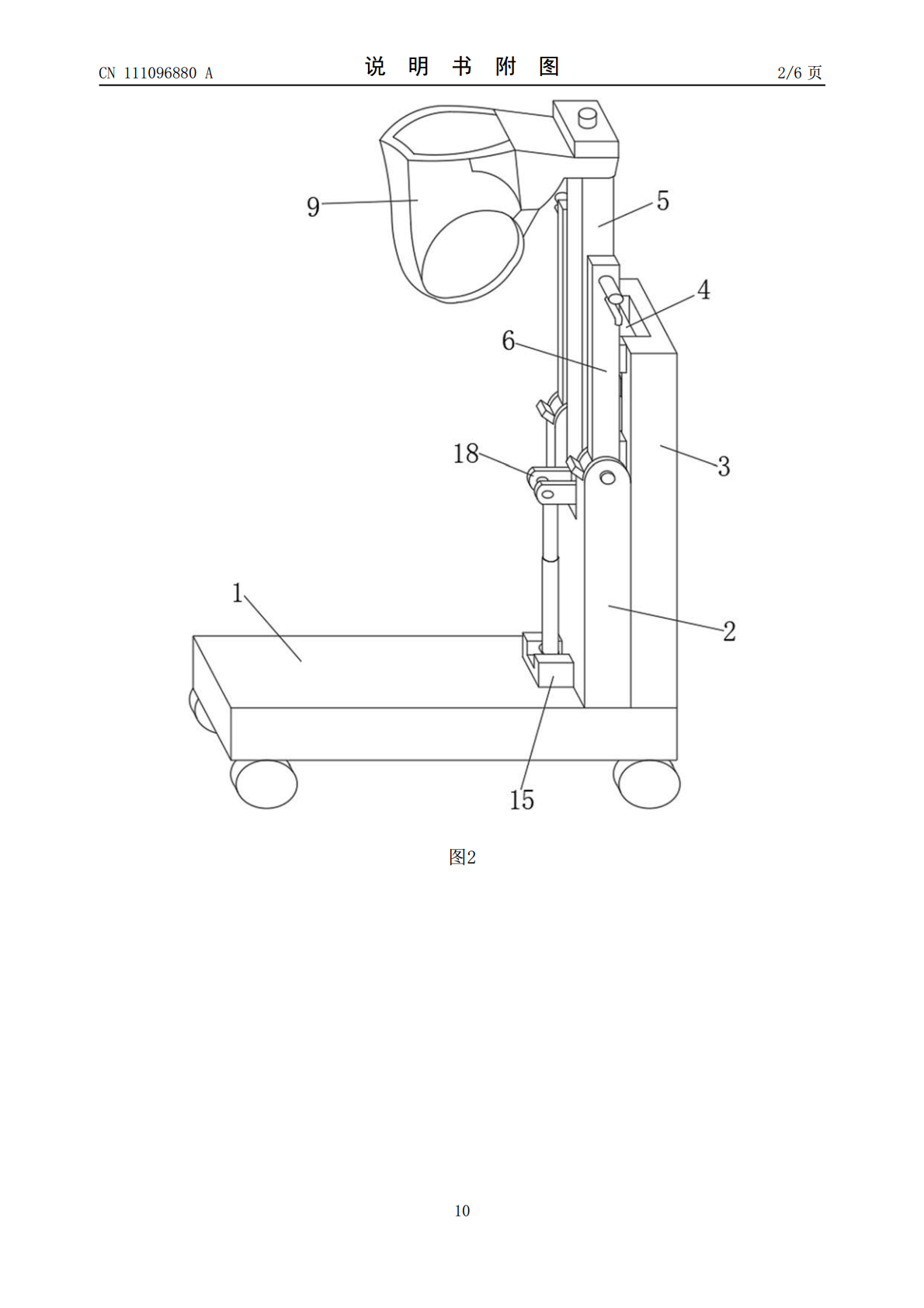
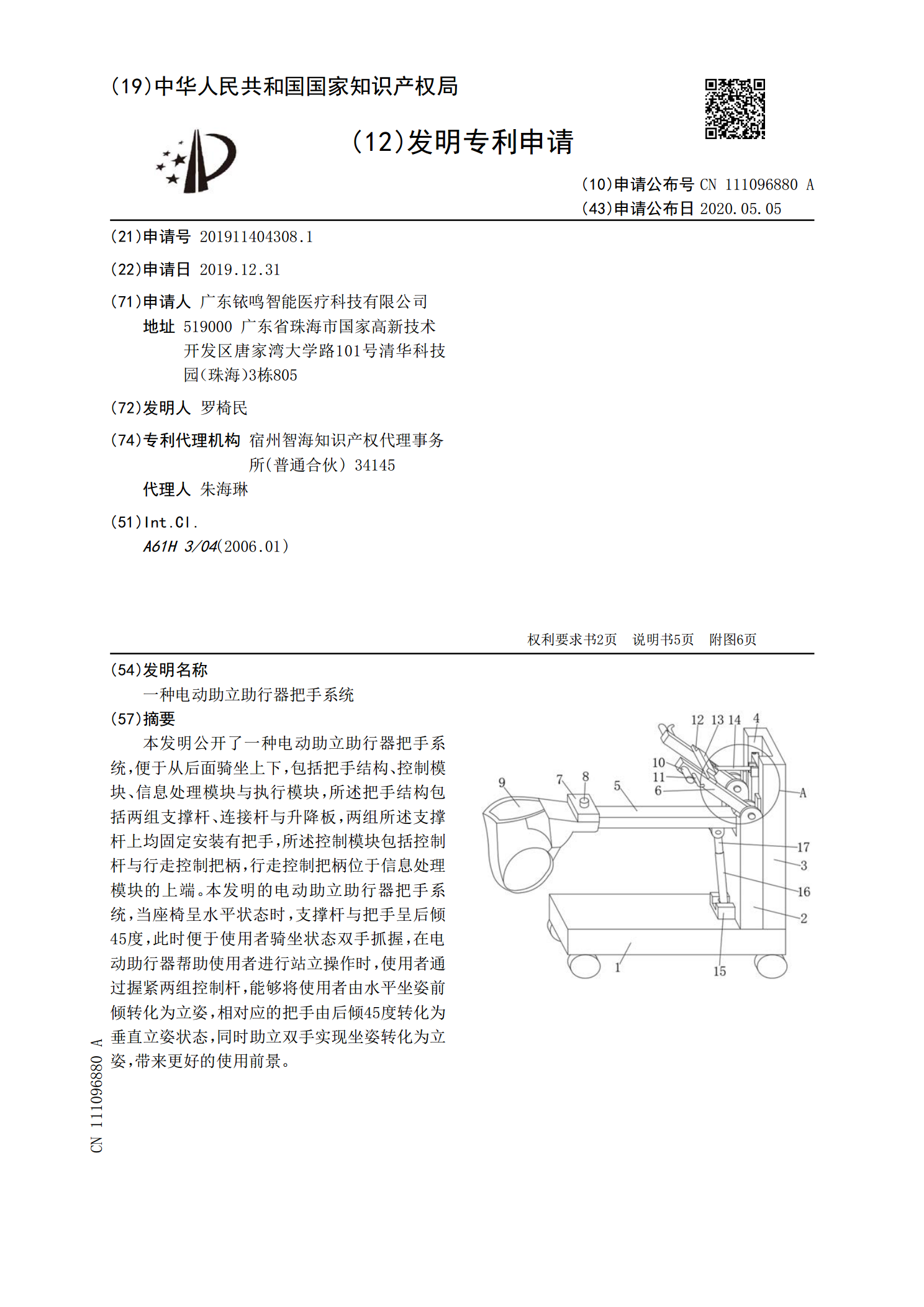
本发明公开了一种电动助立助行器把手系统,便于从后面骑坐上下,包括把手结构、控制模块、信息处理模块与执行模块,所述把手结构包括两组支撑杆、连接杆与升降板,两组所述支撑杆上均固定安装有把手,所述控制模块包括控制杆与行走控制把柄,行走控制把柄位于信息处理模块的上端。本发明的电动助立助行器把手系统,当座椅呈水平状态时,支撑杆与把手呈后倾45度,此时便于使用者骑坐状态双手抓握,在电动助行器帮助使用者进行站立操作时,使用者通过握紧两组控制杆,能够将使用者由水平坐姿前倾转化为立姿,相对应的把手由后倾45度转化为垂直立姿
一种电动助立助行器坐靠背系统.pdf
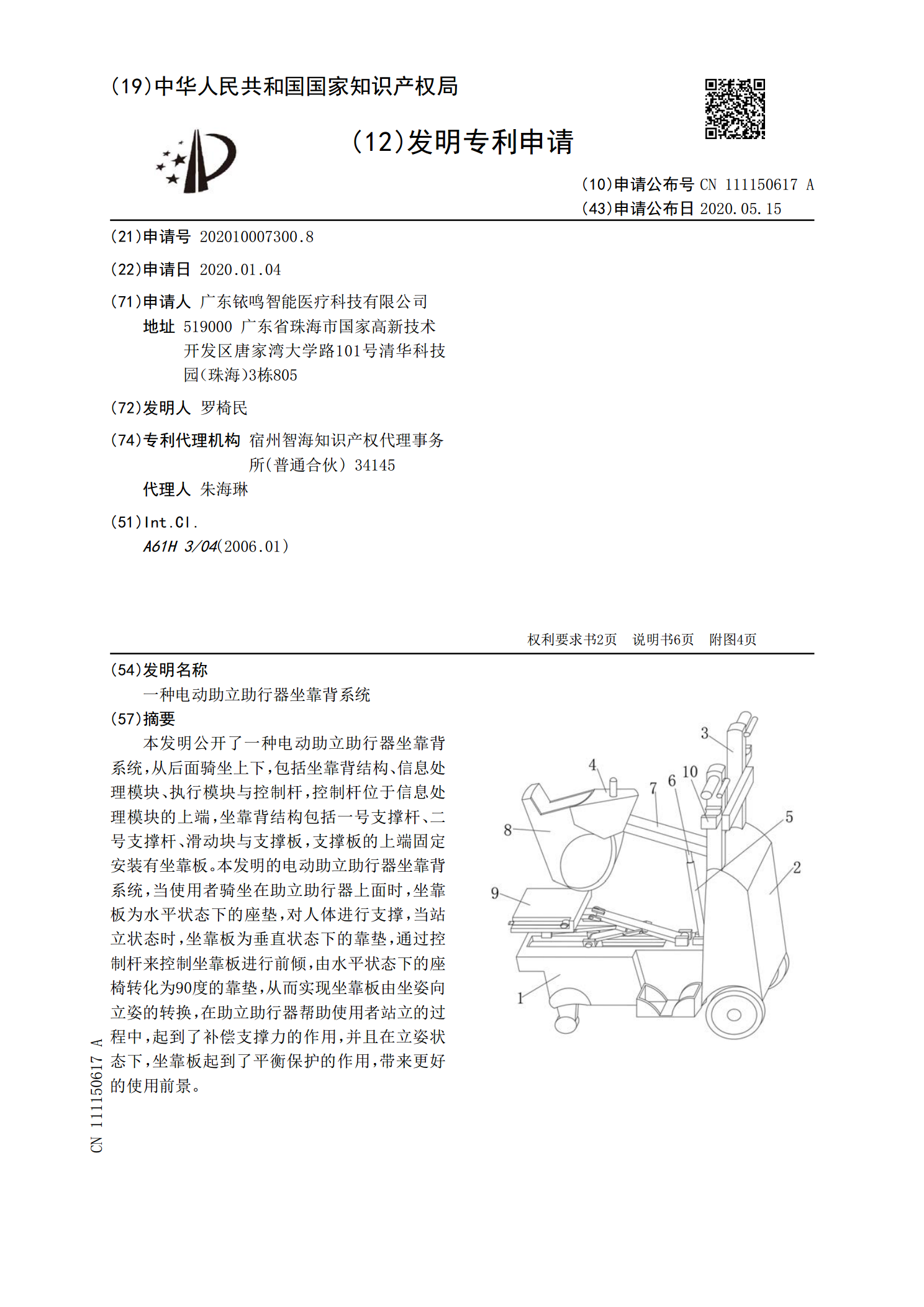
本发明公开了一种电动助立助行器坐靠背系统,从后面骑坐上下,包括坐靠背结构、信息处理模块、执行模块与控制杆,控制杆位于信息处理模块的上端,坐靠背结构包括一号支撑杆、二号支撑杆、滑动块与支撑板,支撑板的上端固定安装有坐靠板。本发明的电动助立助行器坐靠背系统,当使用者骑坐在助立助行器上面时,坐靠板为水平状态下的座垫,对人体进行支撑,当站立状态时,坐靠板为垂直状态下的靠垫,通过控制杆来控制坐靠板进行前倾,由水平状态下的座椅转化为90度的靠垫,从而实现坐靠板由坐姿向立姿的转换,在助立助行器帮助使用者站立的过程中,起

一种电动助立助行器护腰系固带系统.pdf
本发明公开了一种电动助立助行器护腰系固带系统,从后面骑坐上下,包括腿带、腰带和护脊机构,所述移动板的右侧与腿带固定连接,所述伸缩机构的右侧的上端与腰带固定连接,所述支撑杆的底端右侧与护脊机构固定连接。本发明所述的一种电动助立助行器护腰系固带系统,通过设置的腿带、腰带和护脊机构,可有效防止使用者在使用过程中产生二次伤害,且其不仅可供下肢受损者坐轮椅使用,也可供脊柱受损者在床躺姿使用,还可供颈部受损者使用,使卧床者身体各处受力均匀,让其可直立在机器上,并将人立姿状与助行器通过护腰系固带系统连接为一个整体,通用

电动助行器.pdf
本发明涉及可穿戴设备技术领域,具体为电动助行器,包括安装架,所述安装架上设置座椅,所述安装架转动连接长度可调节的伸缩杆,各所述伸缩杆下端转动连接鞋套,各所述伸缩杆与鞋套的连接处安装用于控制所述伸缩杆长度变化的足传感器组件,本电动助行器对人体提供支撑力,防止长时间站立或者行走造成关节不适。
一种电动护理助行器.pdf
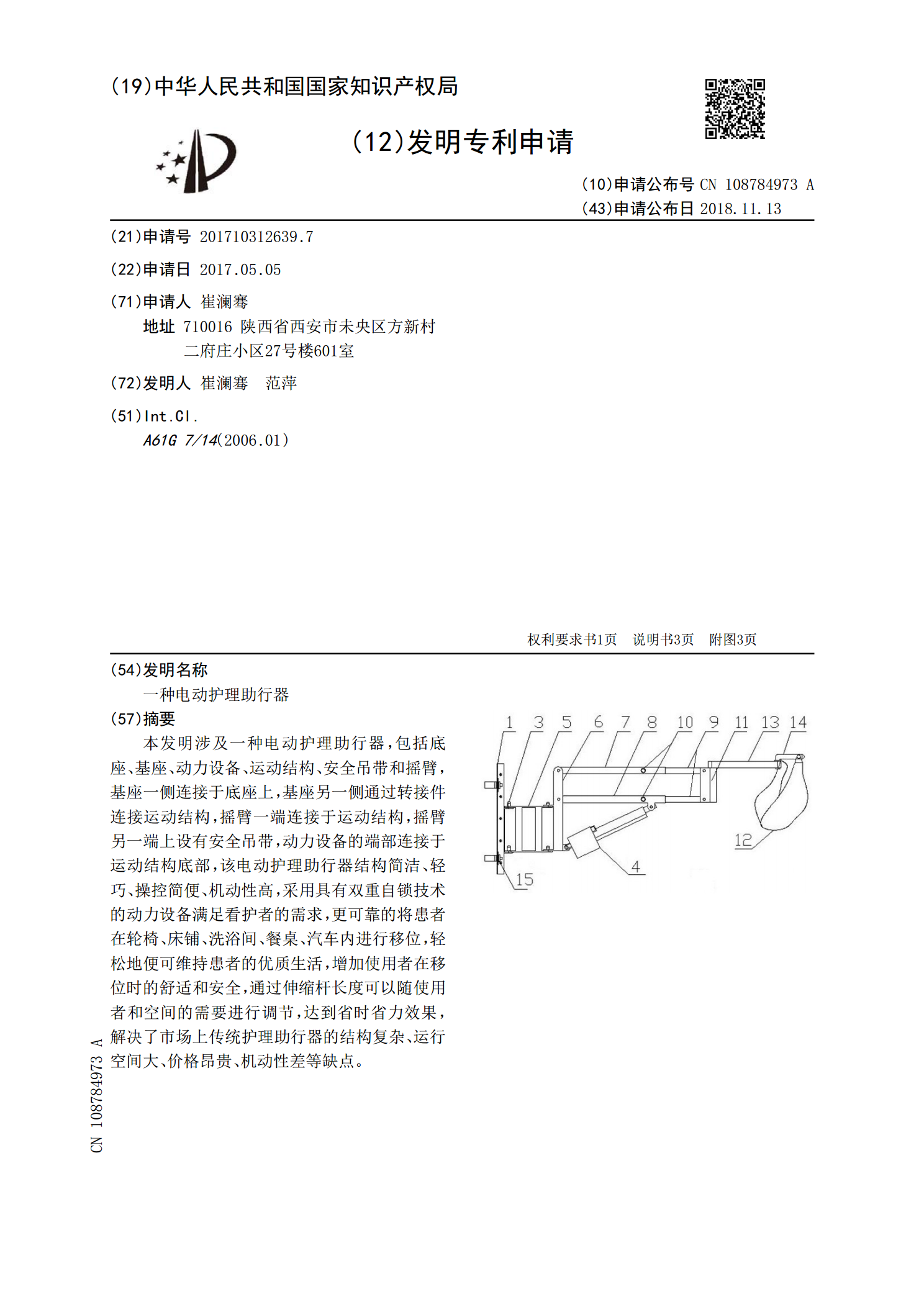
本发明涉及一种电动护理助行器,包括底座、基座、动力设备、运动结构、安全吊带和摇臂,基座一侧连接于底座上,基座另一侧通过转接件连接运动结构,摇臂一端连接于运动结构,摇臂另一端上设有安全吊带,动力设备的端部连接于运动结构底部,该电动护理助行器结构简洁、轻巧、操控简便、机动性高,采用具有双重自锁技术的动力设备满足看护者的需求,更可靠的将患者在轮椅、床铺、洗浴间、餐桌、汽车内进行移位,轻松地便可维持患者的优质生活,增加使用者在移位时的舒适和安全,通过伸缩杆长度可以随使用者和空间的需要进行调节,达到省时省力效果,解