
一种工业器械加工生产用夹持机械手臂.pdf

猫巷****熙柔

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种工业器械加工生产用夹持机械手臂.pdf
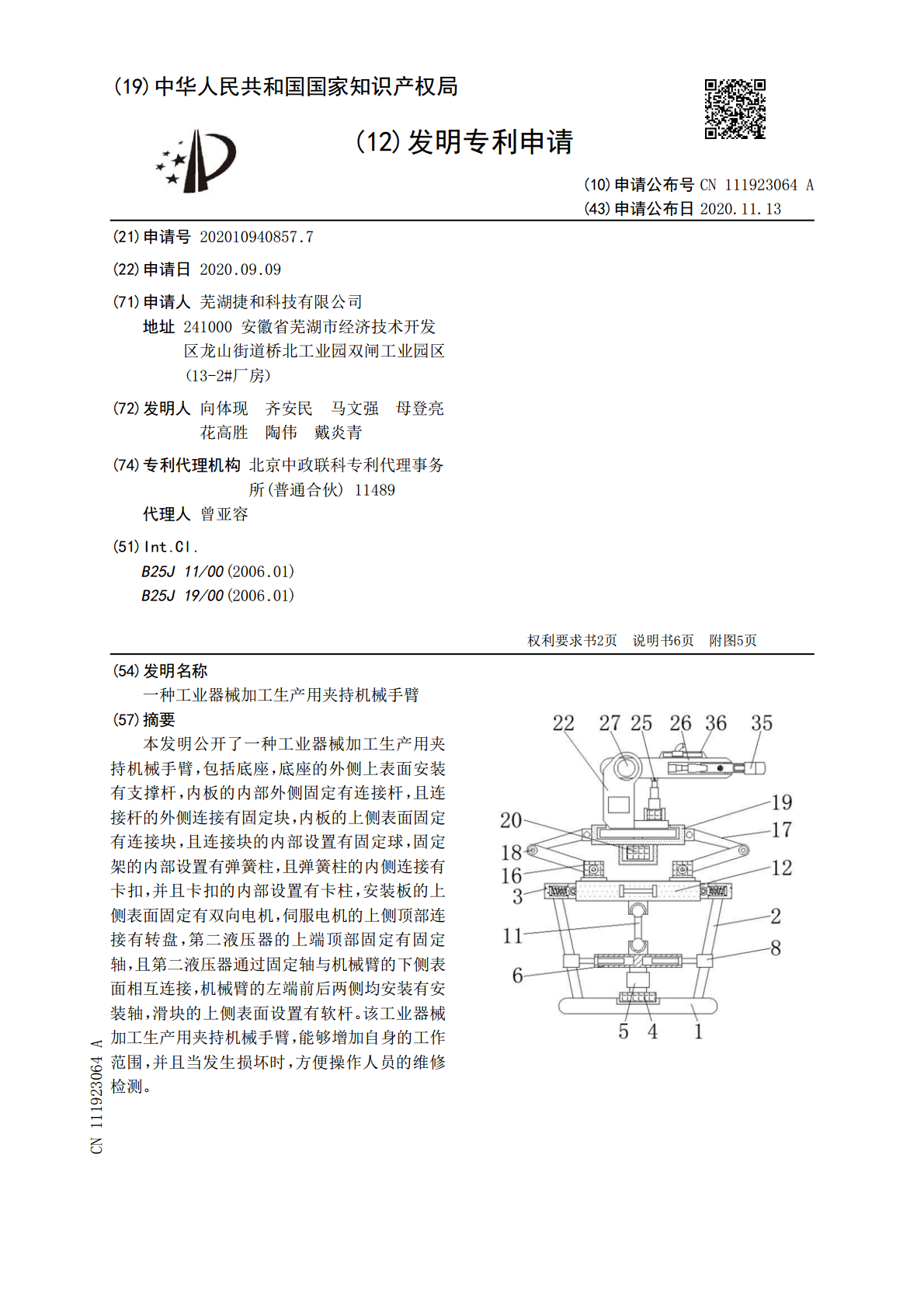
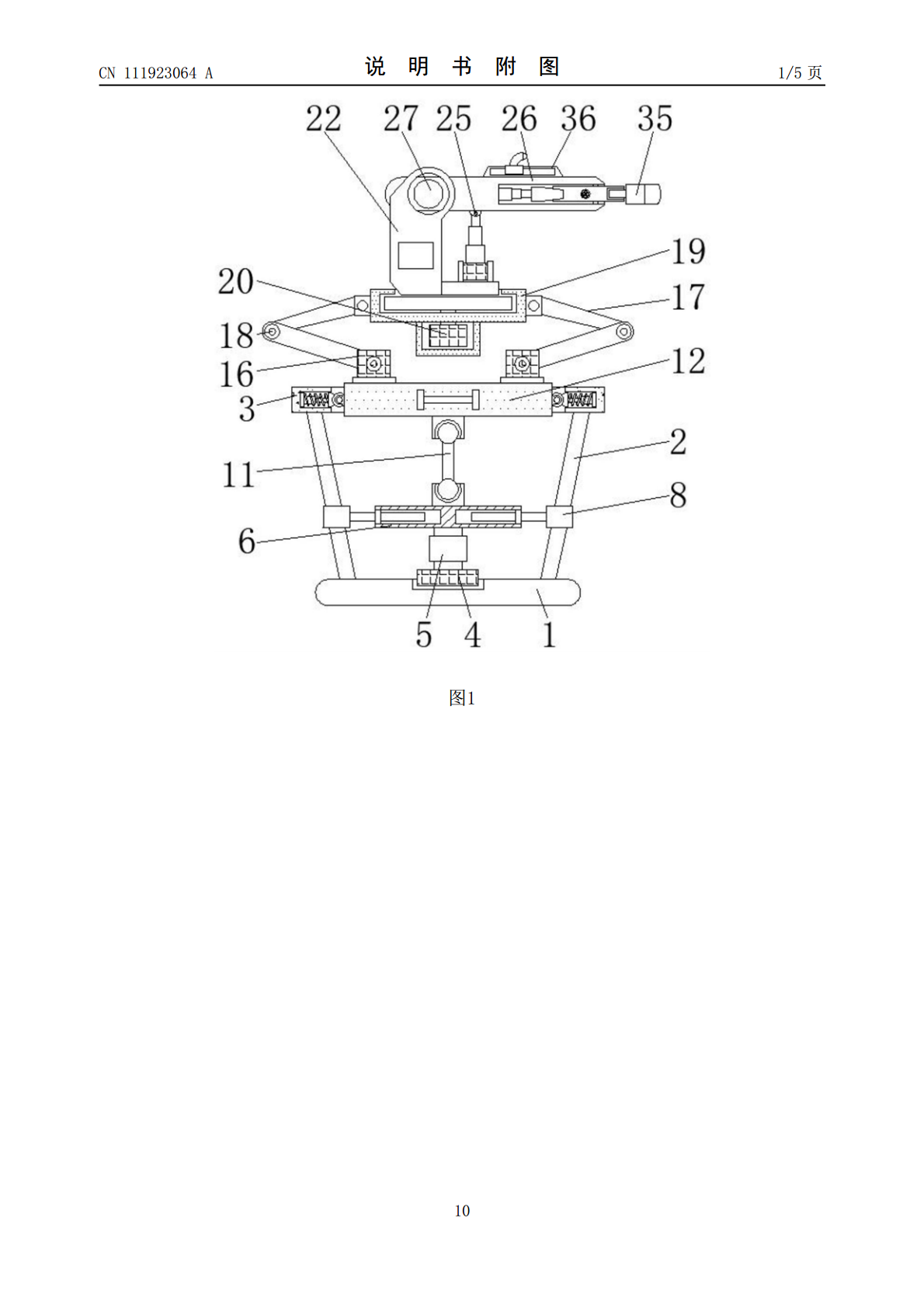
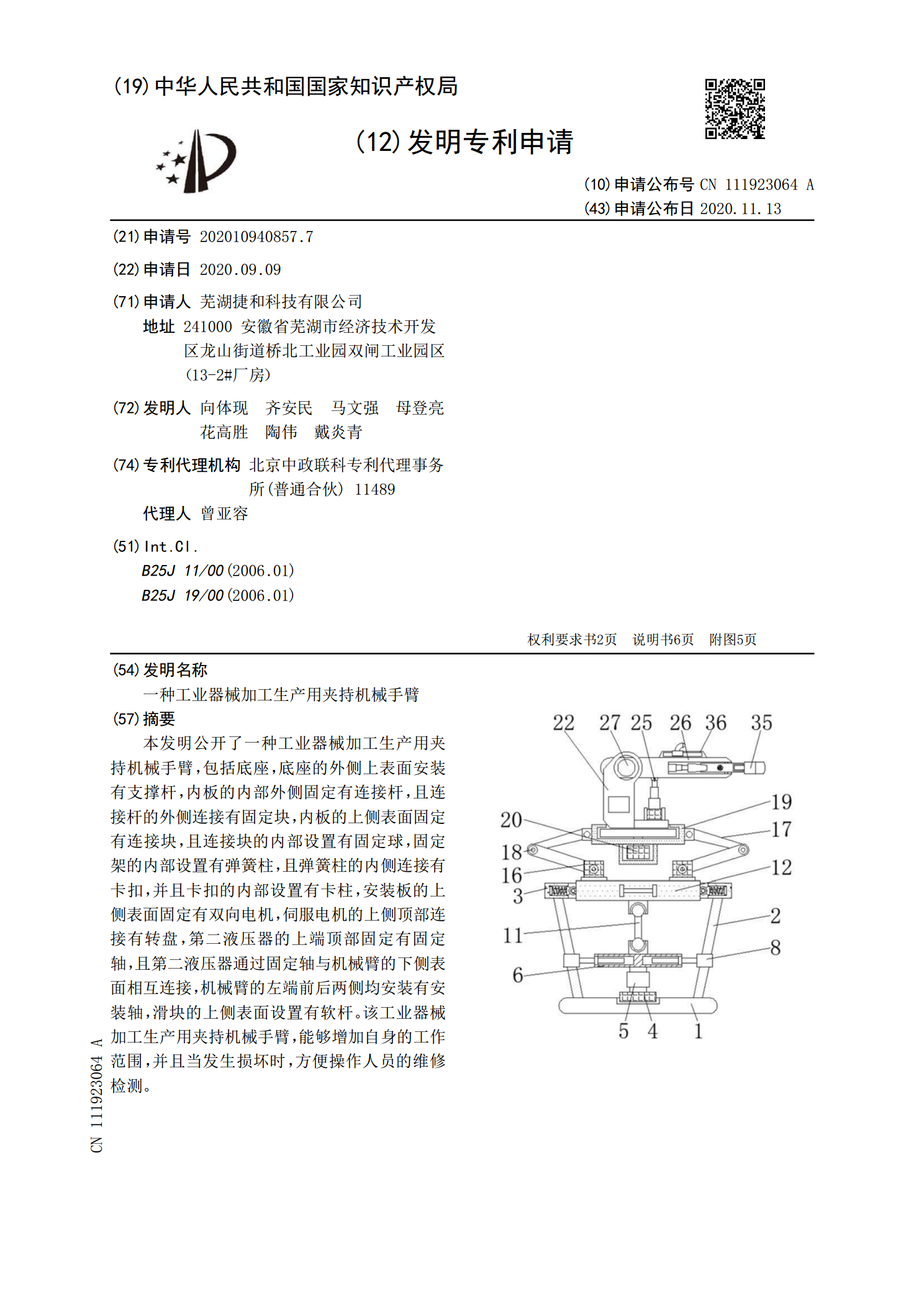
本发明公开了一种工业器械加工生产用夹持机械手臂,包括底座,底座的外侧上表面安装有支撑杆,内板的内部外侧固定有连接杆,且连接杆的外侧连接有固定块,内板的上侧表面固定有连接块,且连接块的内部设置有固定球,固定架的内部设置有弹簧柱,且弹簧柱的内侧连接有卡扣,并且卡扣的内部设置有卡柱,安装板的上侧表面固定有双向电机,伺服电机的上侧顶部连接有转盘,第二液压器的上端顶部固定有固定轴,且第二液压器通过固定轴与机械臂的下侧表面相互连接,机械臂的左端前后两侧均安装有安装轴,滑块的上侧表面设置有软杆。该工业器械加工生产用夹持
一种机械手臂用椭圆夹持装置.pdf
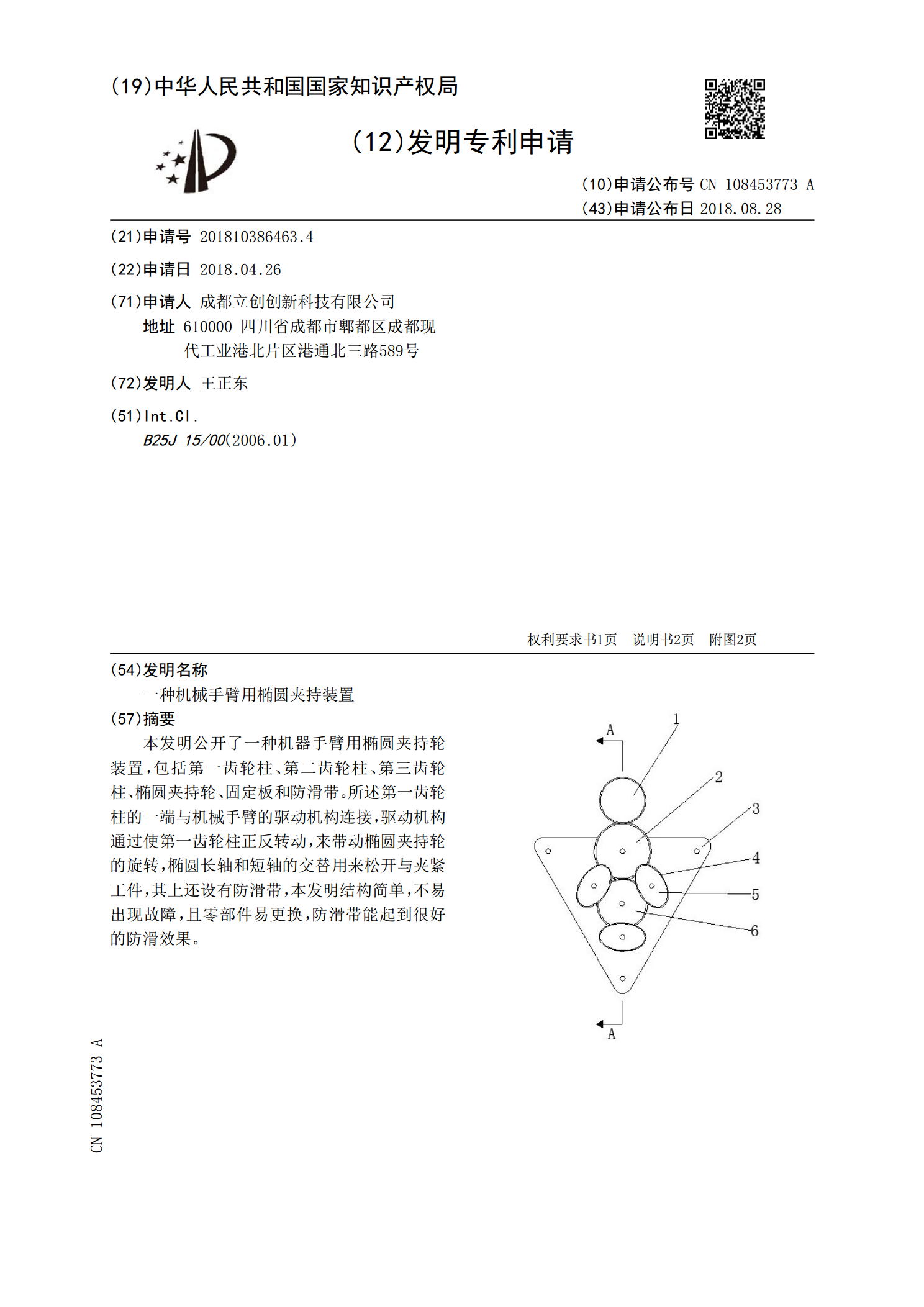
本发明公开了一种机器手臂用椭圆夹持轮装置,包括第一齿轮柱、第二齿轮柱、第三齿轮柱、椭圆夹持轮、固定板和防滑带。所述第一齿轮柱的一端与机械手臂的驱动机构连接,驱动机构通过使第一齿轮柱正反转动,来带动椭圆夹持轮的旋转,椭圆长轴和短轴的交替用来松开与夹紧工件,其上还设有防滑带,本发明结构简单,不易出现故障,且零部件易更换,防滑带能起到很好的防滑效果。
一种工业生产用便捷式机械排料手臂.pdf
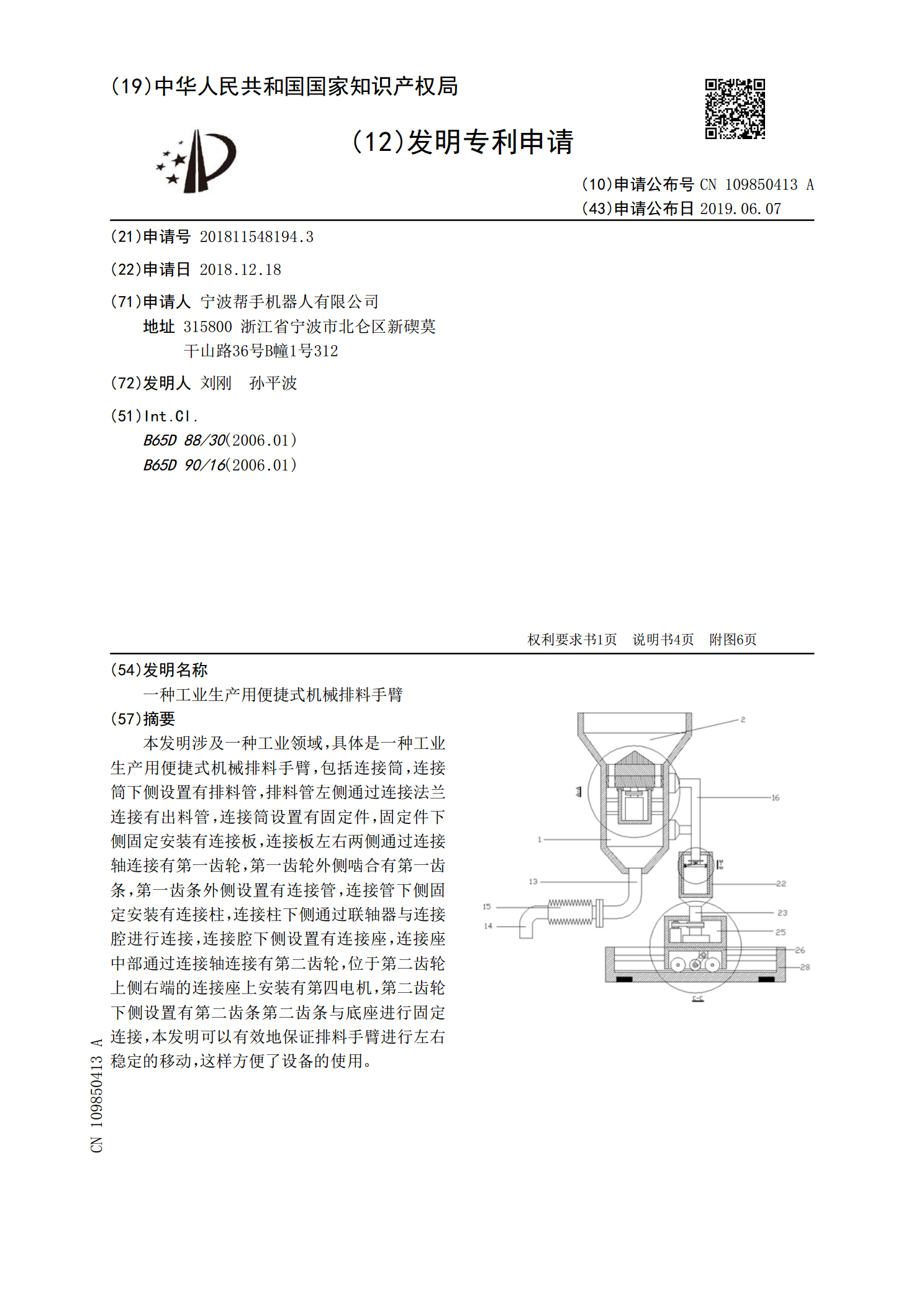
本发明涉及一种工业领域,具体是一种工业生产用便捷式机械排料手臂,包括连接筒,连接筒下侧设置有排料管,排料管左侧通过连接法兰连接有出料管,连接筒设置有固定件,固定件下侧固定安装有连接板,连接板左右两侧通过连接轴连接有第一齿轮,第一齿轮外侧啮合有第一齿条,第一齿条外侧设置有连接管,连接管下侧固定安装有连接柱,连接柱下侧通过联轴器与连接腔进行连接,连接腔下侧设置有连接座,连接座中部通过连接轴连接有第二齿轮,位于第二齿轮上侧右端的连接座上安装有第四电机,第二齿轮下侧设置有第二齿条第二齿条与底座进行固定连接,本发明
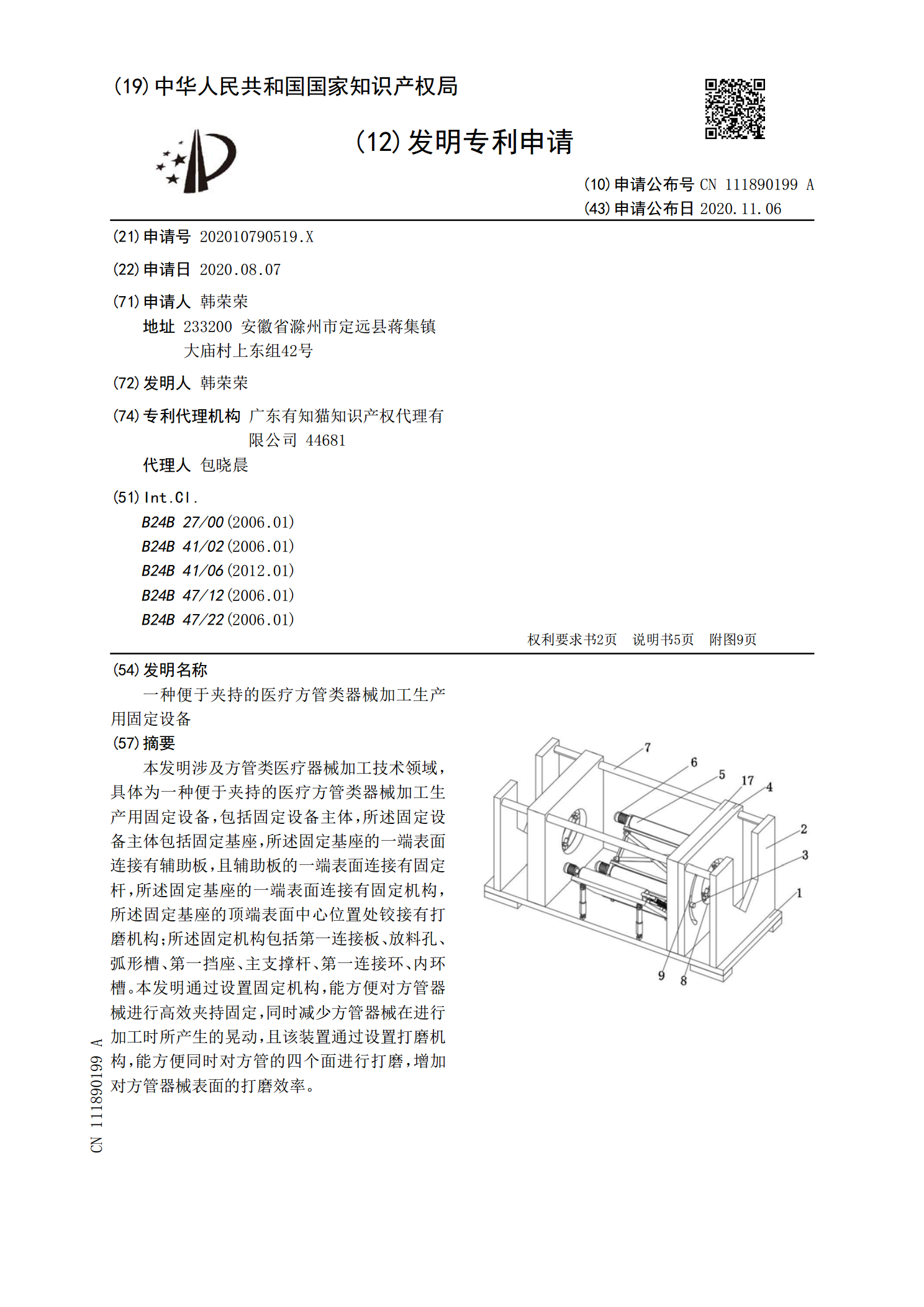
一种便于夹持的医疗方管类器械加工生产用固定设备.pdf
本发明涉及方管类医疗器械加工技术领域,具体为一种便于夹持的医疗方管类器械加工生产用固定设备,包括固定设备主体,所述固定设备主体包括固定基座,所述固定基座的一端表面连接有辅助板,且辅助板的一端表面连接有固定杆,所述固定基座的一端表面连接有固定机构,所述固定基座的顶端表面中心位置处铰接有打磨机构;所述固定机构包括第一连接板、放料孔、弧形槽、第一挡座、主支撑杆、第一连接环、内环槽。本发明通过设置固定机构,能方便对方管器械进行高效夹持固定,同时减少方管器械在进行加工时所产生的晃动,且该装置通过设置打磨机构,能方便
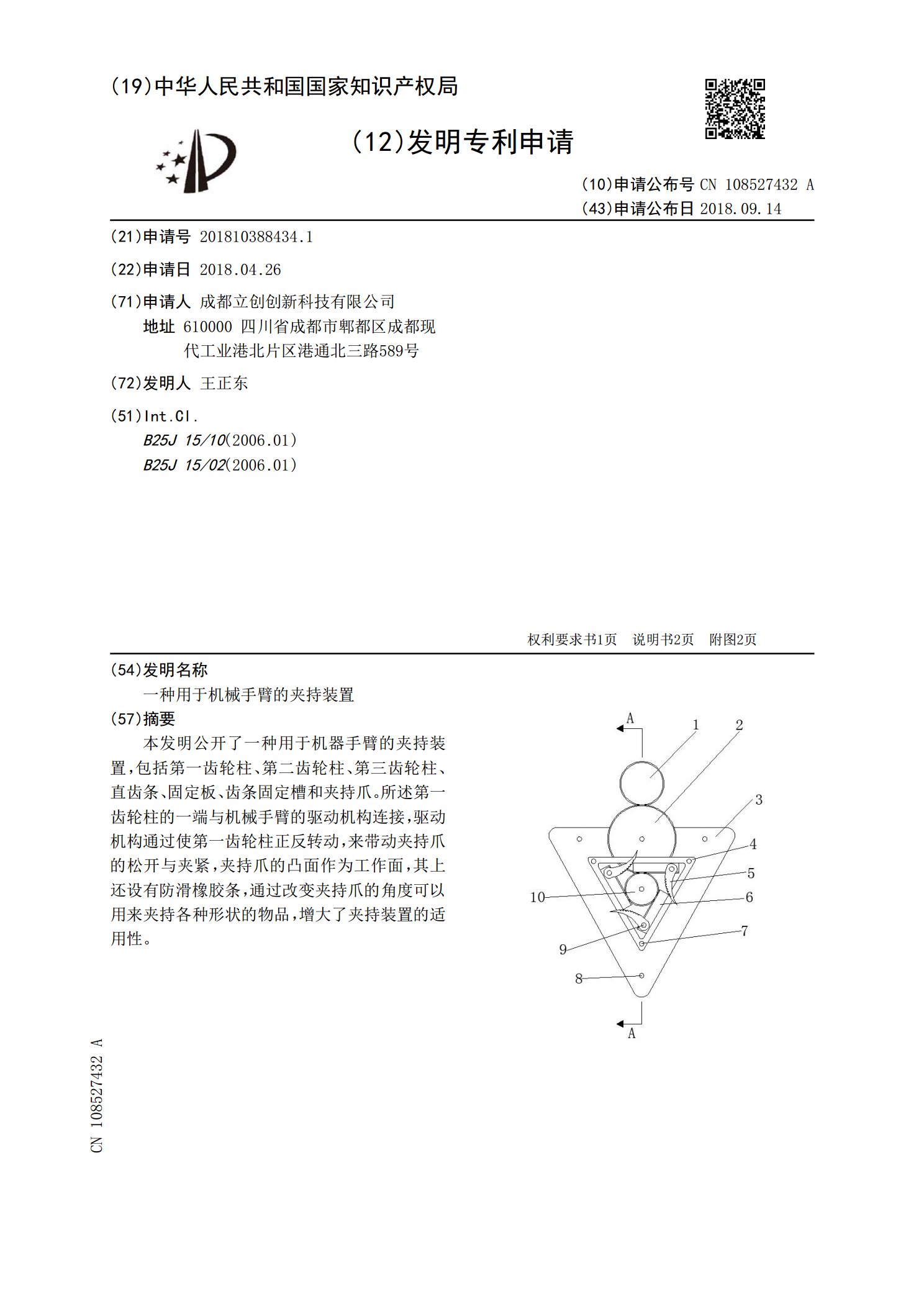
一种用于机械手臂的夹持装置.pdf
本发明公开了一种用于机器手臂的夹持装置,包括第一齿轮柱、第二齿轮柱、第三齿轮柱、直齿条、固定板、齿条固定槽和夹持爪。所述第一齿轮柱的一端与机械手臂的驱动机构连接,驱动机构通过使第一齿轮柱正反转动,来带动夹持爪的松开与夹紧,夹持爪的凸面作为工作面,其上还设有防滑橡胶条,通过改变夹持爪的角度可以用来夹持各种形状的物品,增大了夹持装置的适用性。