
一种医疗康复助行机器人上的悬吊支架.pdf

静芙****可爱

1/8

2/8

3/8
4/8

5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种医疗康复助行机器人上的悬吊支架.pdf
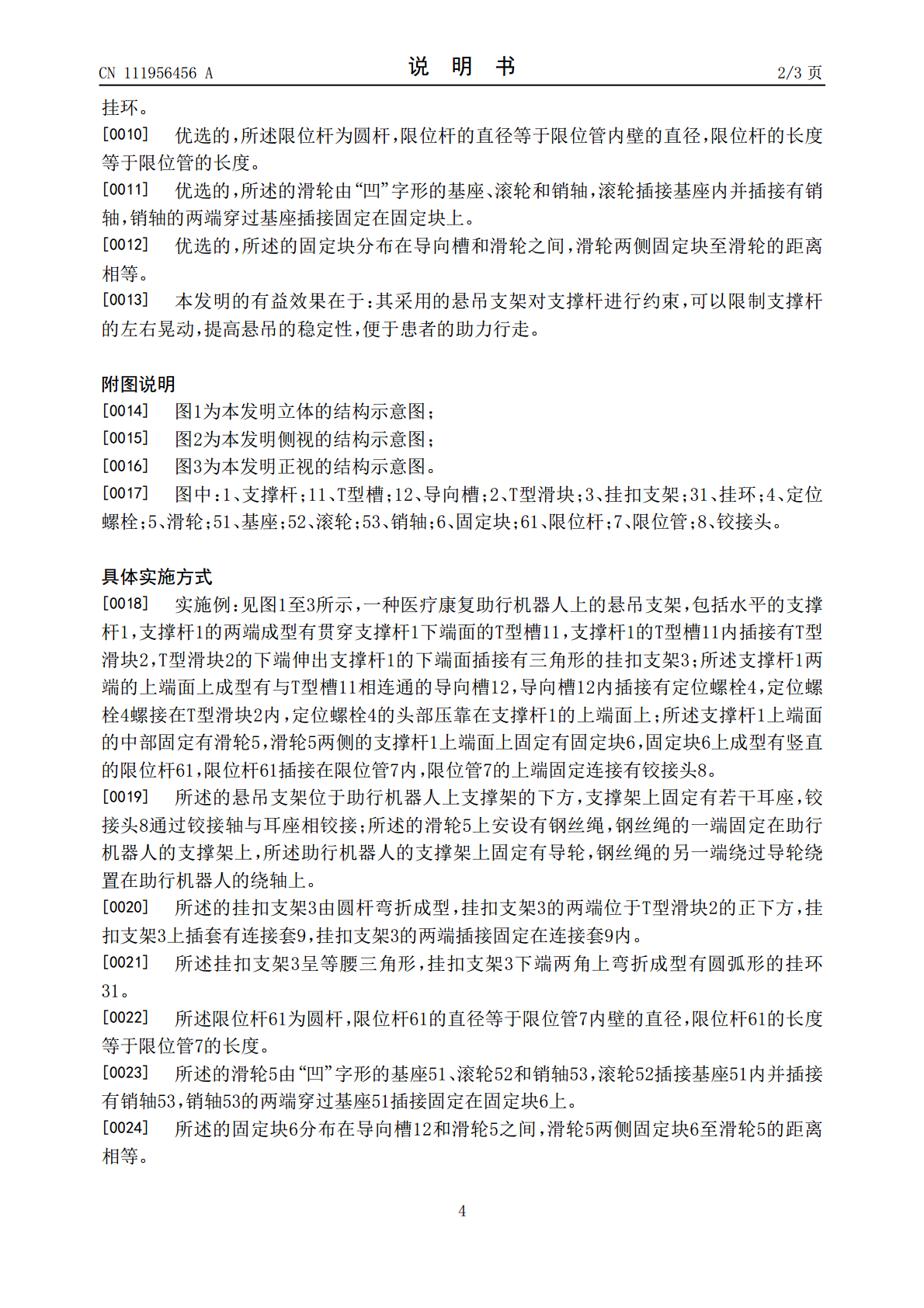
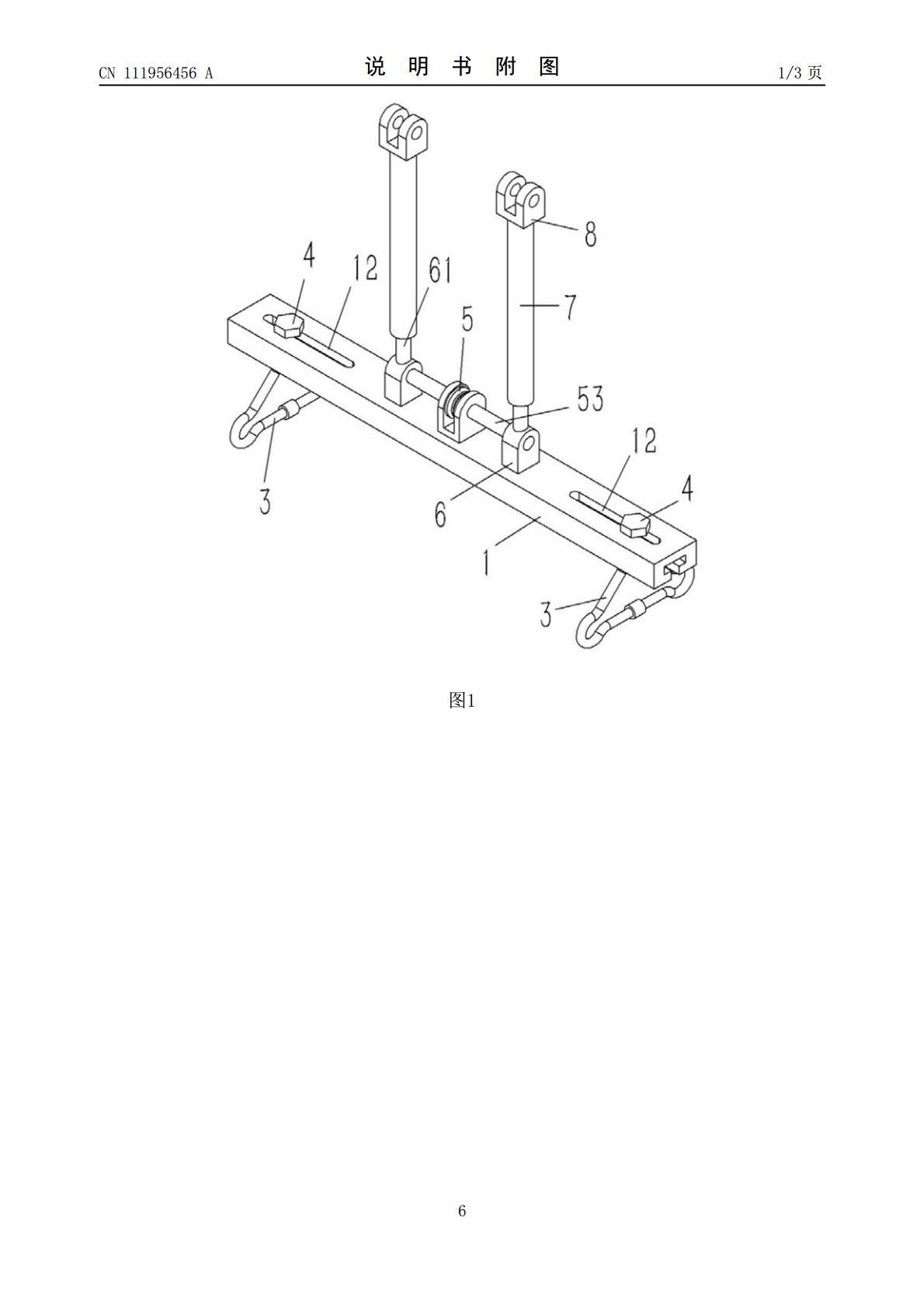
本发明公开了一种医疗康复助行机器人上的悬吊支架,包括水平的支撑杆,支撑杆的两端成型有贯穿支撑杆下端面的T型槽,支撑杆的T型槽内插接有T型滑块,T型滑块的下端伸出支撑杆的下端面插接有三角形的挂扣支架;所述支撑杆两端的上端面上成型有与T型槽相连通的导向槽,导向槽内插接有定位螺栓,定位螺栓螺接在T型滑块内,定位螺栓的头部压靠在支撑杆的上端面上;所述支撑杆上端面的中部固定有滑轮,滑轮两侧的支撑杆上端面上固定有固定块,固定块上成型有竖直的限位杆,限位杆插接在限位管内,限位管的上端固定连接有铰接头。
一种医疗康复助行设备上的可调扶手.pdf
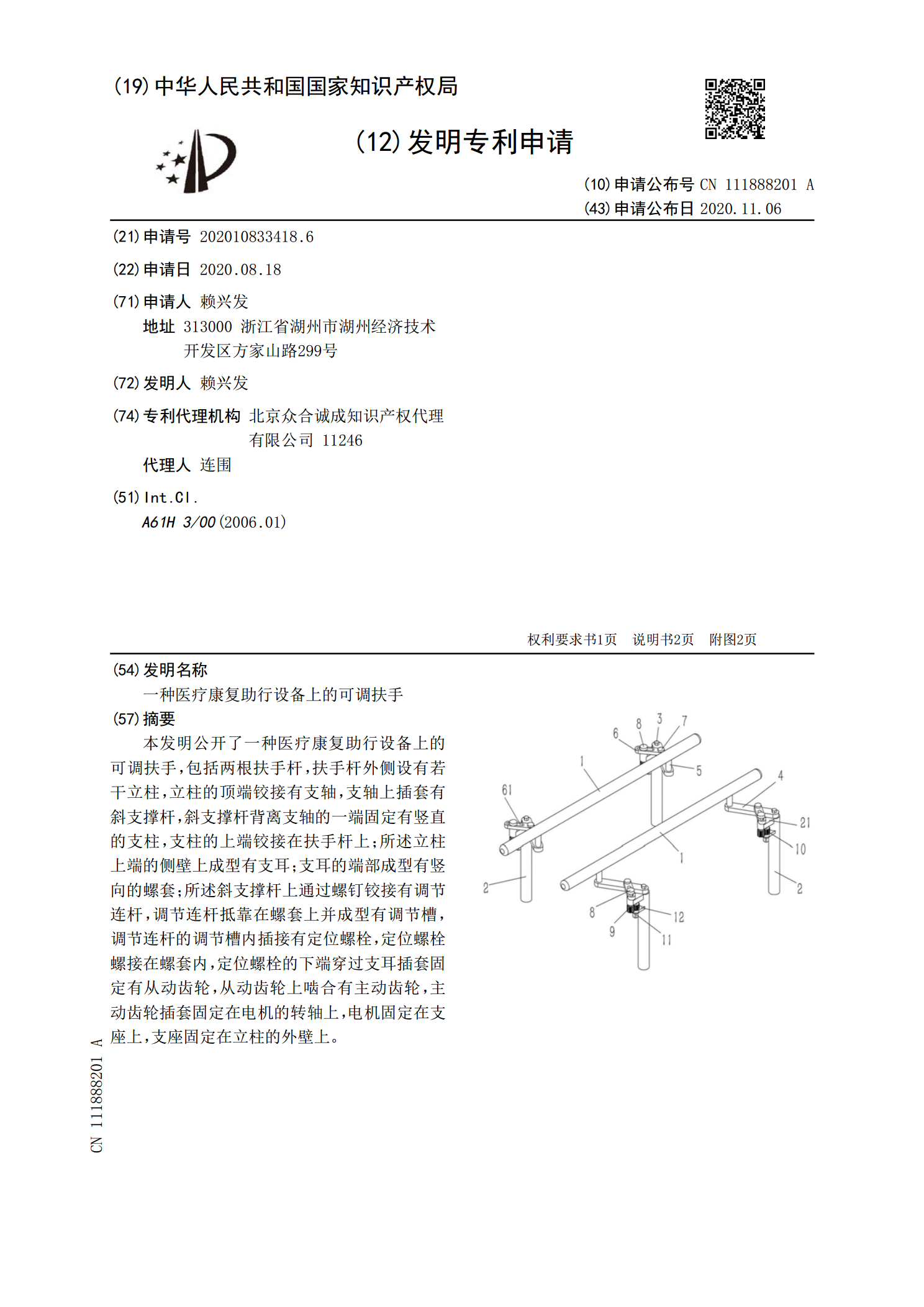
本发明公开了一种医疗康复助行设备上的可调扶手,包括两根扶手杆,扶手杆外侧设有若干立柱,立柱的顶端铰接有支轴,支轴上插套有斜支撑杆,斜支撑杆背离支轴的一端固定有竖直的支柱,支柱的上端铰接在扶手杆上;所述立柱上端的侧壁上成型有支耳;支耳的端部成型有竖向的螺套;所述斜支撑杆上通过螺钉铰接有调节连杆,调节连杆抵靠在螺套上并成型有调节槽,调节连杆的调节槽内插接有定位螺栓,定位螺栓螺接在螺套内,定位螺栓的下端穿过支耳插套固定有从动齿轮,从动齿轮上啮合有主动齿轮,主动齿轮插套固定在电机的转轴上,电机固定在支座上,支座固

一种康复助行机器人.pdf
本申请涉及机器人技术领域,提供了一种康复助行机器人,包括呈U字形的车身底部结构,其上对称设置有两个竖直的7字形的支撑杆,所述7字形支撑杆与车身底部结构活动连接;支撑杆的横向设置有一具有两个把手的扶手结构,车身底部结构底部四角安装有4个车轮,中间安装有踏板,支撑杆的中部设置有连接件,氮气弹簧的另一端与扶手结构相连接,用于调整扶手结构的位置,旋转气缸的另一端连接在车身底部结构上用于调整支撑杆与车身底部结构之间的角度位置关系;两竖直的支撑杆之间平行的设置有一升降电缸调节装置,用于调节扶手结构的高度;两竖直的支撑

一种康复医疗助行器.pdf
本发明公开了一种康复医疗助行器,包括两个U型支腿和连接板,两个支腿并排分布,连接板的背侧两端焊接于两个支腿的前侧,连接板的前侧中部焊接有存放饮用水、毛巾、急救用品用的物品箱,支腿的上部杆体外侧设有防滑橡胶套,中部设有水平加强管,两个支腿的水平加强管之间滑动连接有伸缩式座椅;伸缩式座椅包括两个与水平加强管垂直的水平滑杆,两个水平滑杆各自的两端设有滑套,两个水平滑杆之间固定有能够伸缩的支撑网体。本发明结构设计合理,通过连接板固定物品箱,便于存放与锻炼相关的物品;设有伸缩式座椅,重量小,不使用时几乎不占用空间。

一种医疗康复助行器.pdf
本发明涉及一种医疗康复助行器,包括支架、伸缩杆、把手和刹车柄,伸缩杆设在支架上,伸缩杆上设置有安装孔,支架一侧设置有固定螺钉,安装孔与固定螺钉螺纹连接,把手设在伸缩杆末端,刹车柄设在把手下方,刹车柄前端安装有刹车线,刹车线末端固定在支架上,支架底部设置有万向轮和刹车片,刹车片与刹车线连接,刹车片与支架铰接,刹车片前端安装有弹簧,支架中部设置有连接件,连接件与支架焊接,连接件上设置有坐垫,连接件下方设置有储物盒,该医疗康复助行器能够滑动,有效地节省体力,制动效果好,使用安全,同时可以当做坐垫使用。