
一种可变截面可变刚度的机械弹性车轮.pdf

雨巷****碧易

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种可变截面可变刚度的机械弹性车轮.pdf
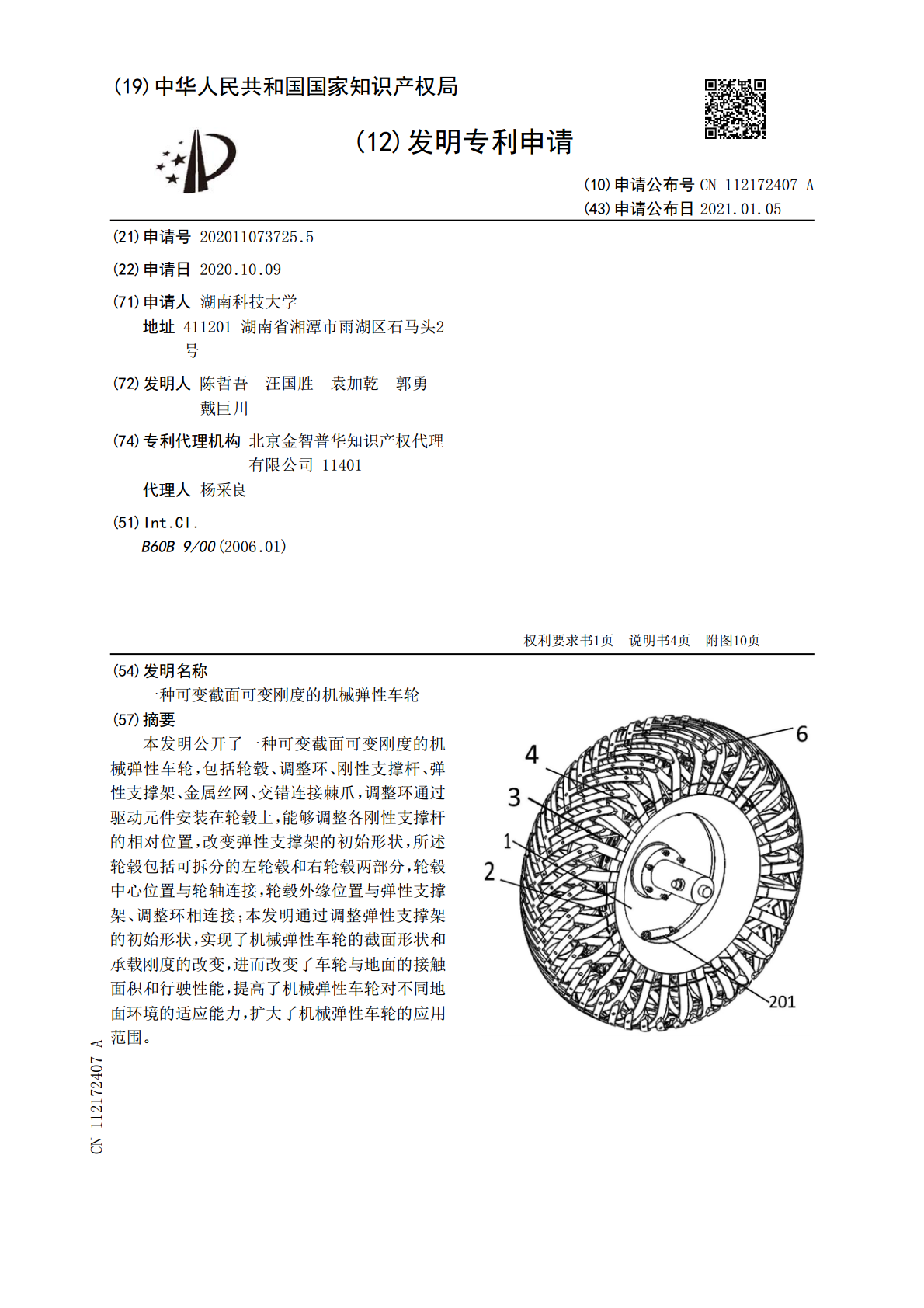
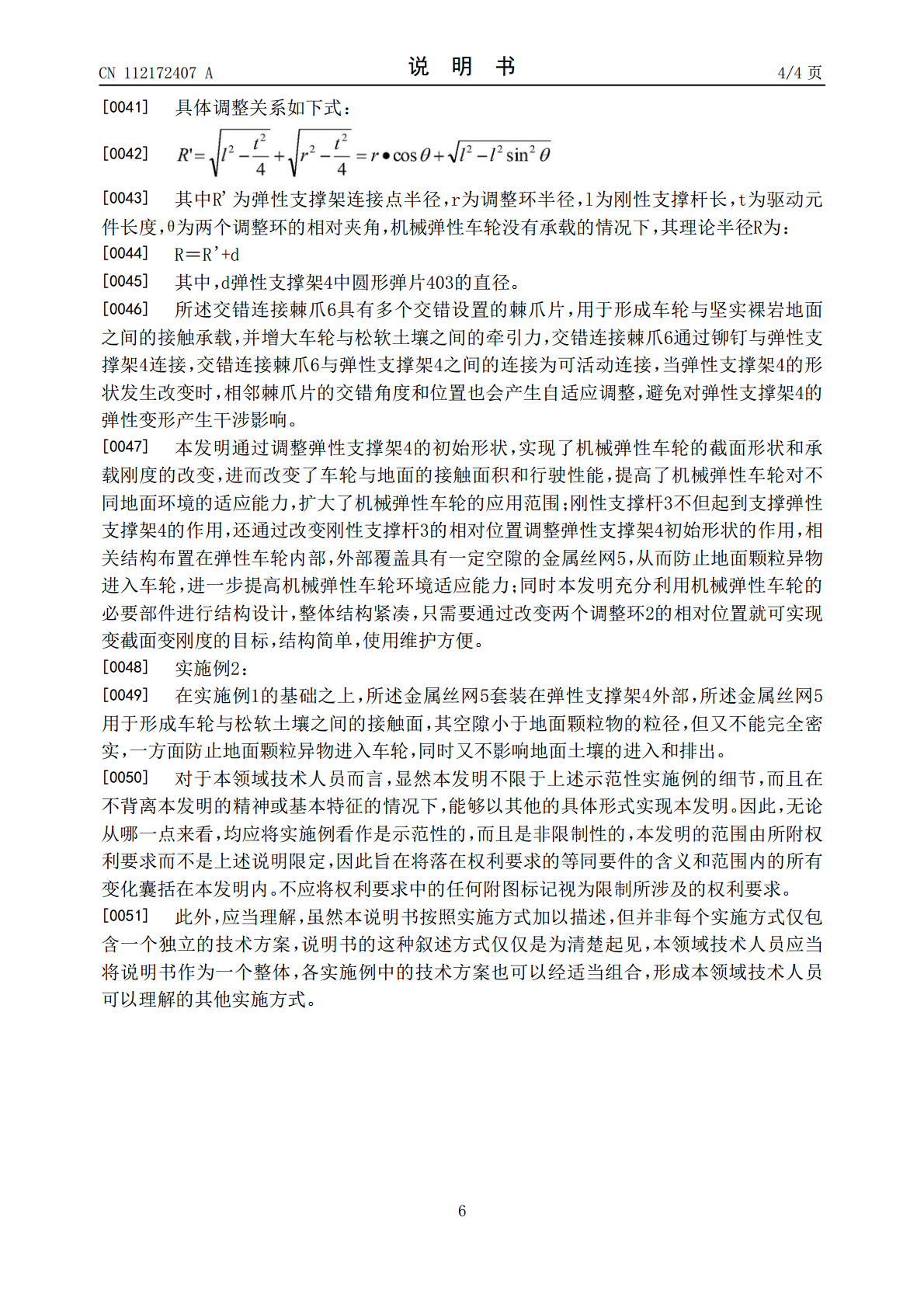
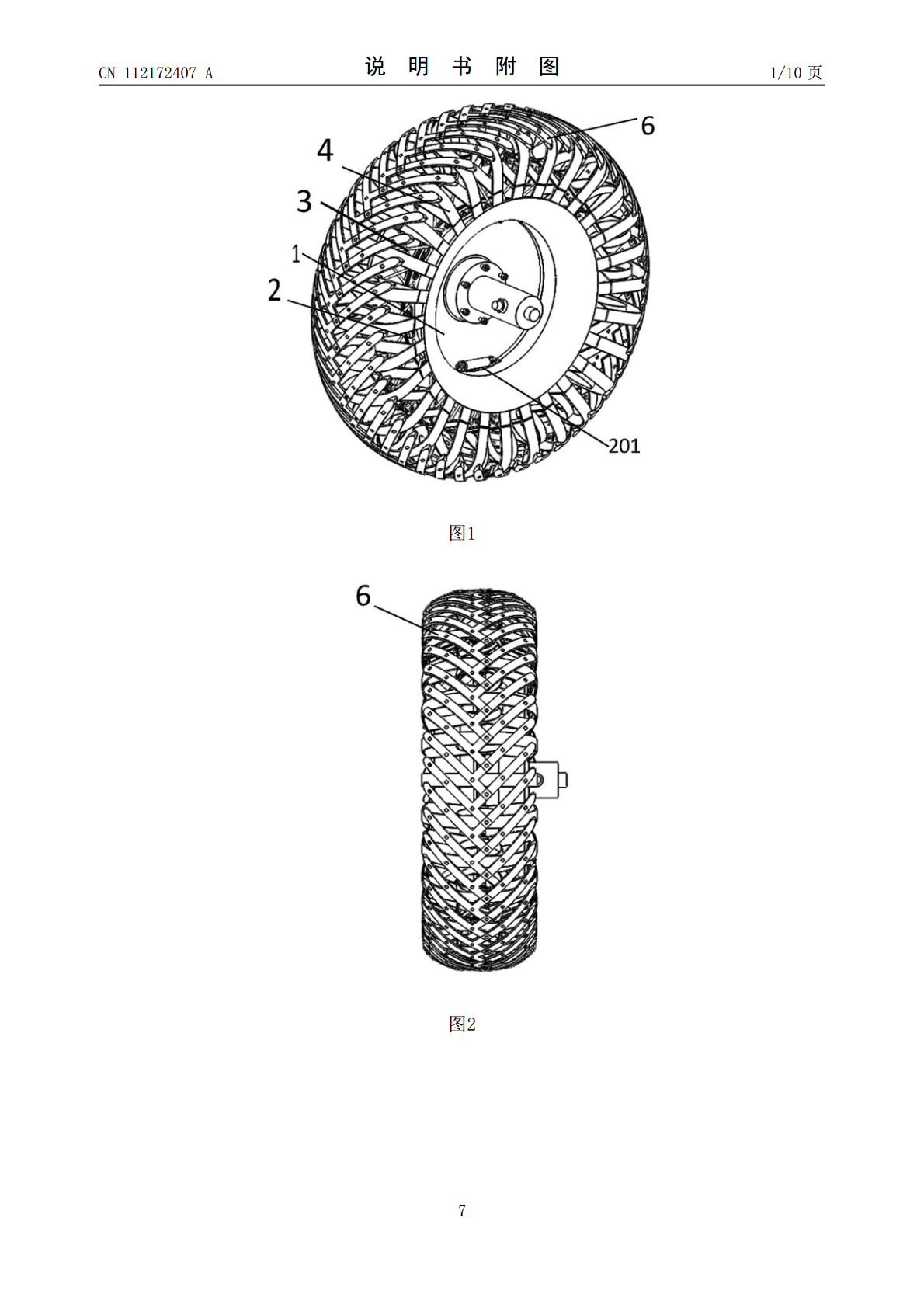
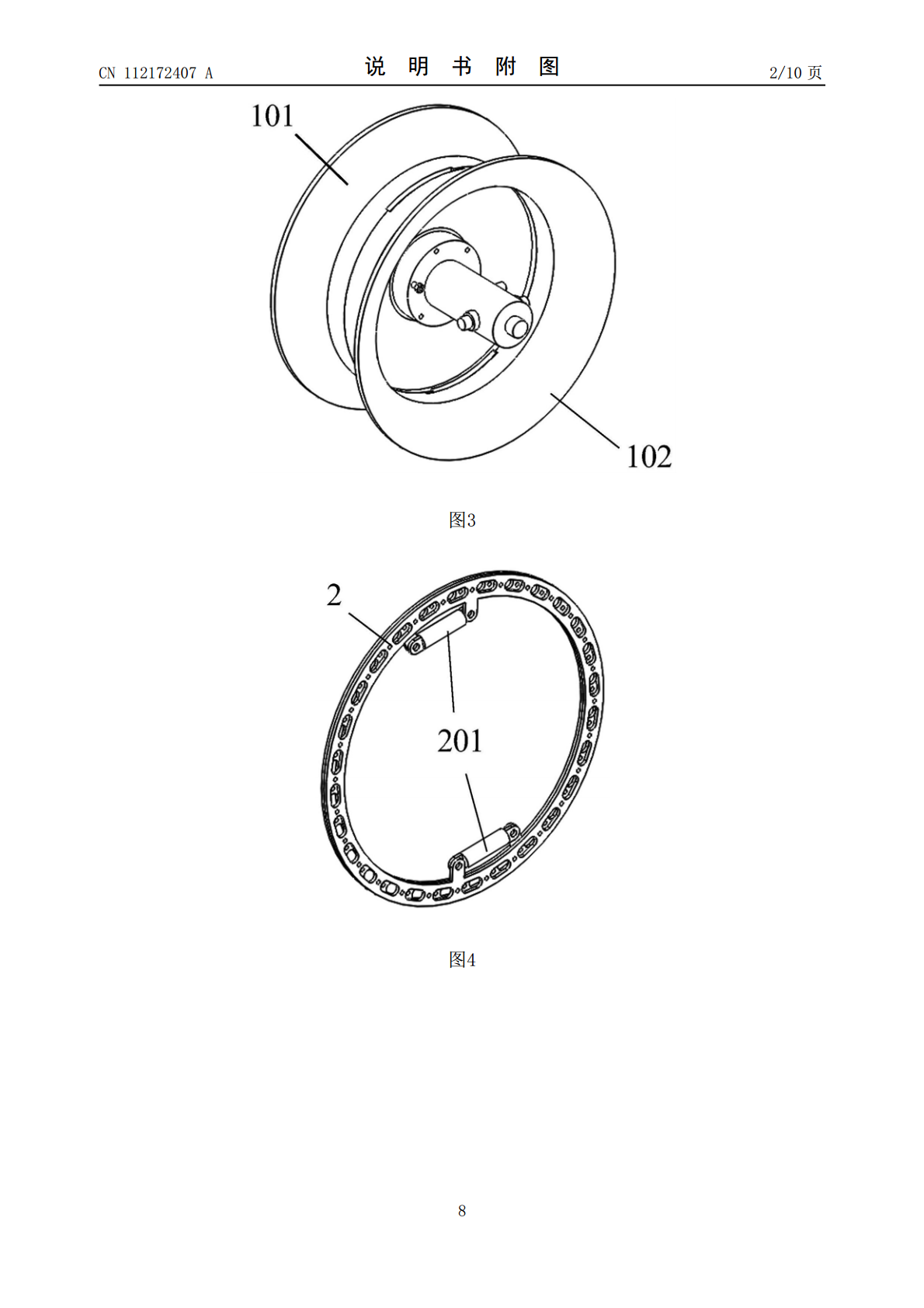
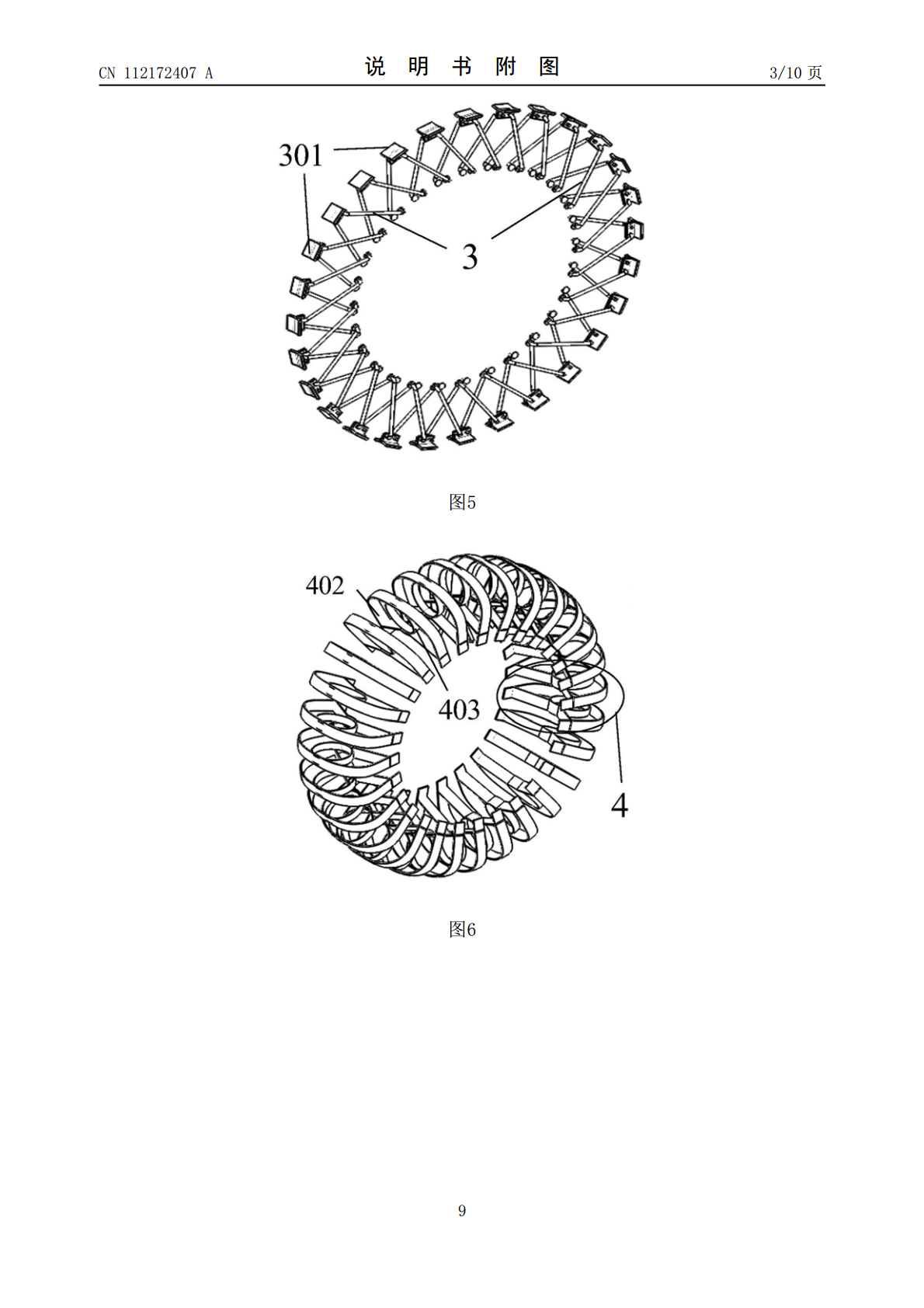
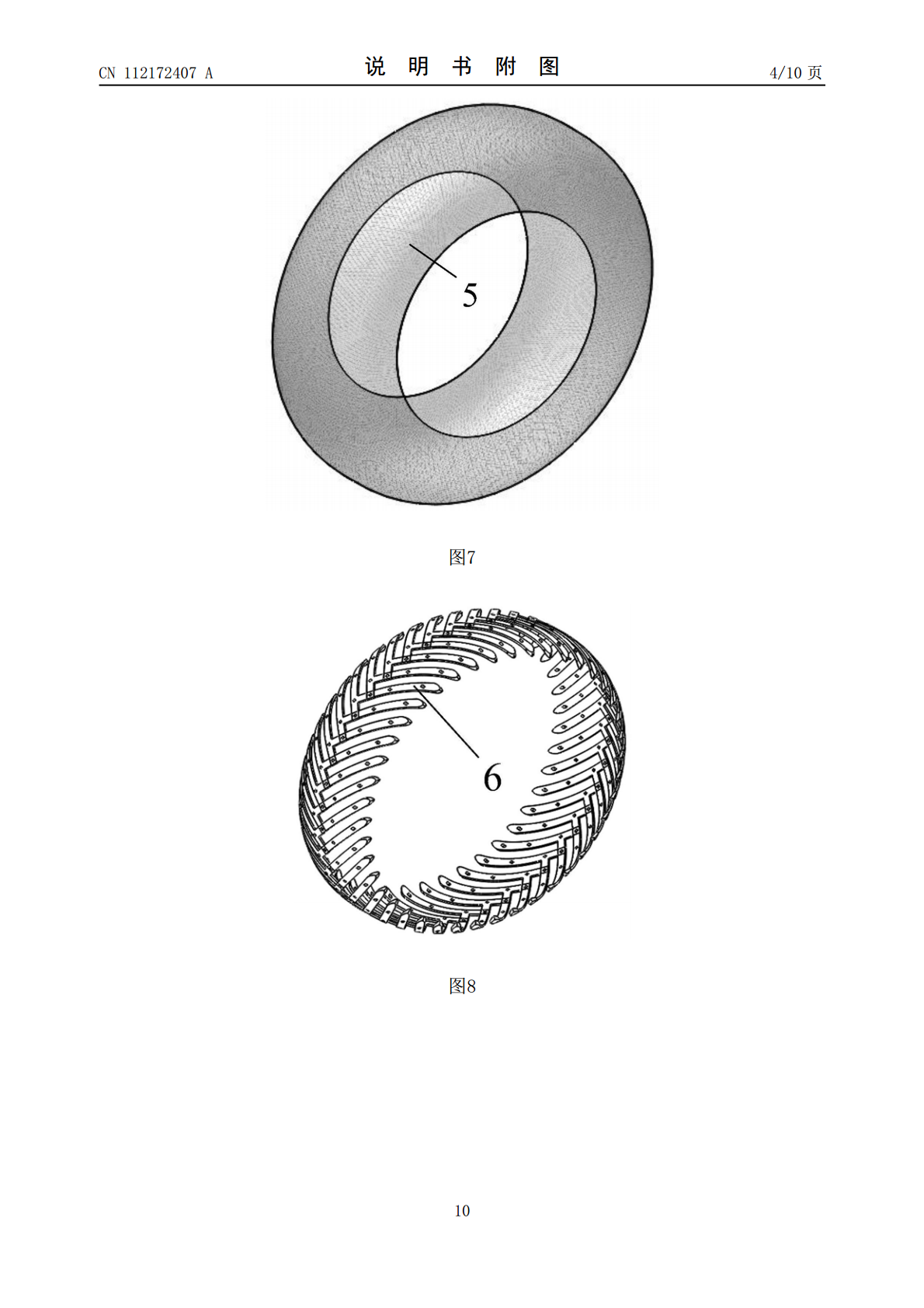
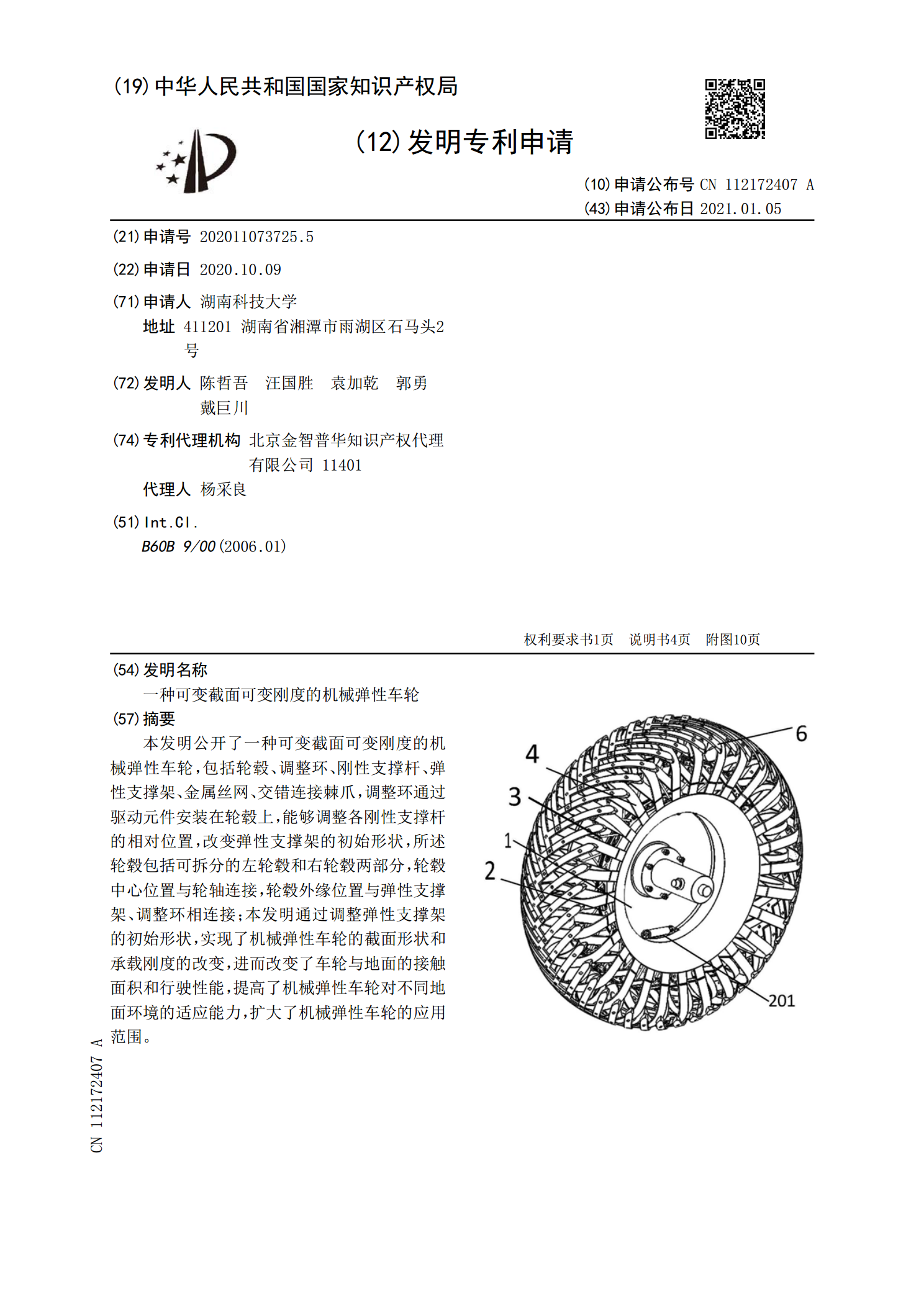
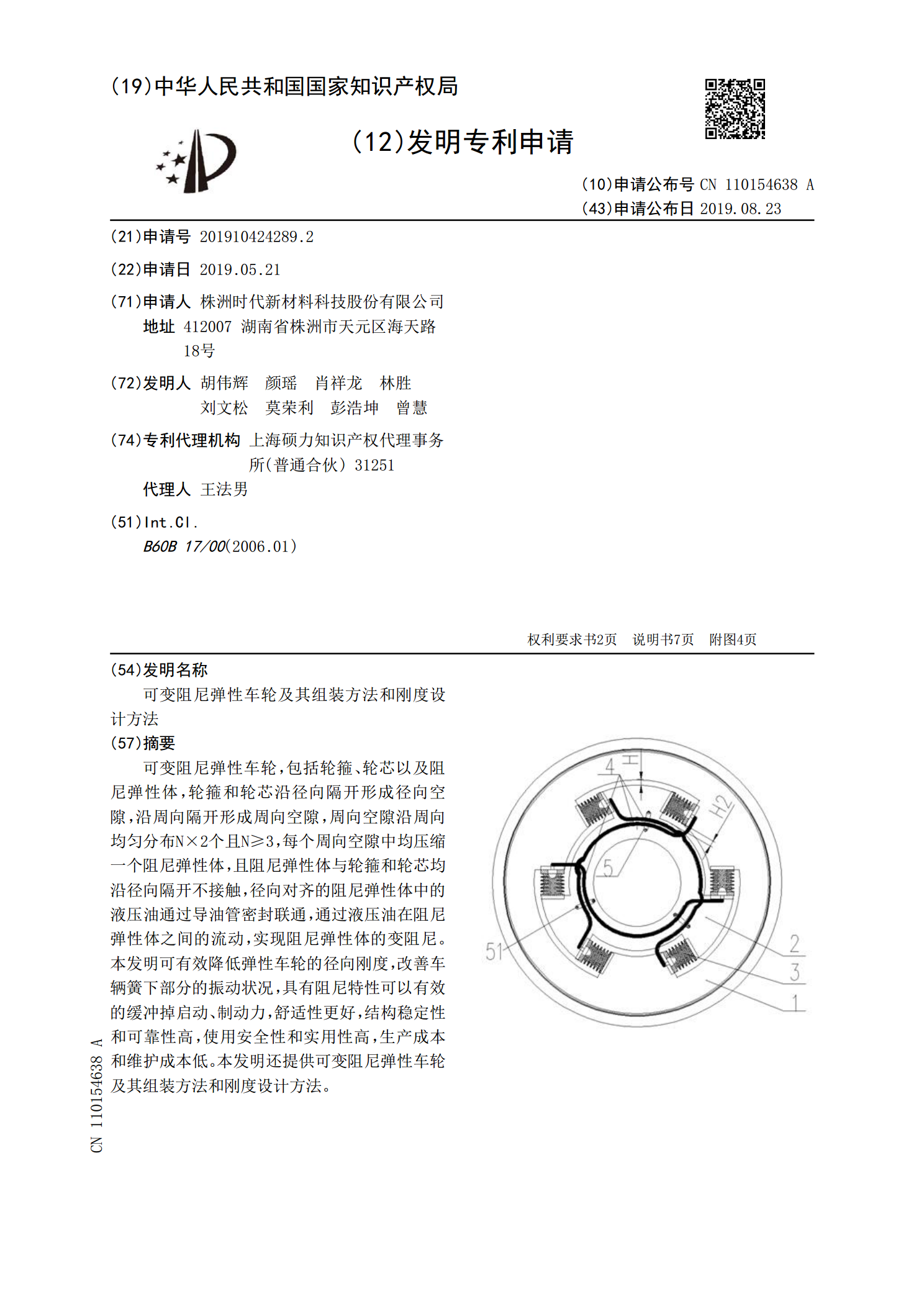
本发明公开了一种可变截面可变刚度的机械弹性车轮,包括轮毂、调整环、刚性支撑杆、弹性支撑架、金属丝网、交错连接棘爪,调整环通过驱动元件安装在轮毂上,能够调整各刚性支撑杆的相对位置,改变弹性支撑架的初始形状,所述轮毂包括可拆分的左轮毂和右轮毂两部分,轮毂中心位置与轮轴连接,轮毂外缘位置与弹性支撑架、调整环相连接;本发明通过调整弹性支撑架的初始形状,实现了机械弹性车轮的截面形状和承载刚度的改变,进而改变了车轮与地面的接触面积和行驶性能,提高了机械弹性车轮对不同地面环境的适应能力,扩大了机械弹性车轮的应用范围。
可变阻尼弹性车轮及其组装方法和刚度设计方法.pdf
可变阻尼弹性车轮,包括轮箍、轮芯以及阻尼弹性体,轮箍和轮芯沿径向隔开形成径向空隙,沿周向隔开形成周向空隙,周向空隙沿周向均匀分布N×2个且N≥3,每个周向空隙中均压缩一个阻尼弹性体,且阻尼弹性体与轮箍和轮芯均沿径向隔开不接触,径向对齐的阻尼弹性体中的液压油通过导油管密封联通,通过液压油在阻尼弹性体之间的流动,实现阻尼弹性体的变阻尼。本发明可有效降低弹性车轮的径向刚度,改善车辆簧下部分的振动状况,具有阻尼特性可以有效的缓冲掉启动、制动力,舒适性更好,结构稳定性和可靠性高,使用安全性和实用性高,生产成本和维护
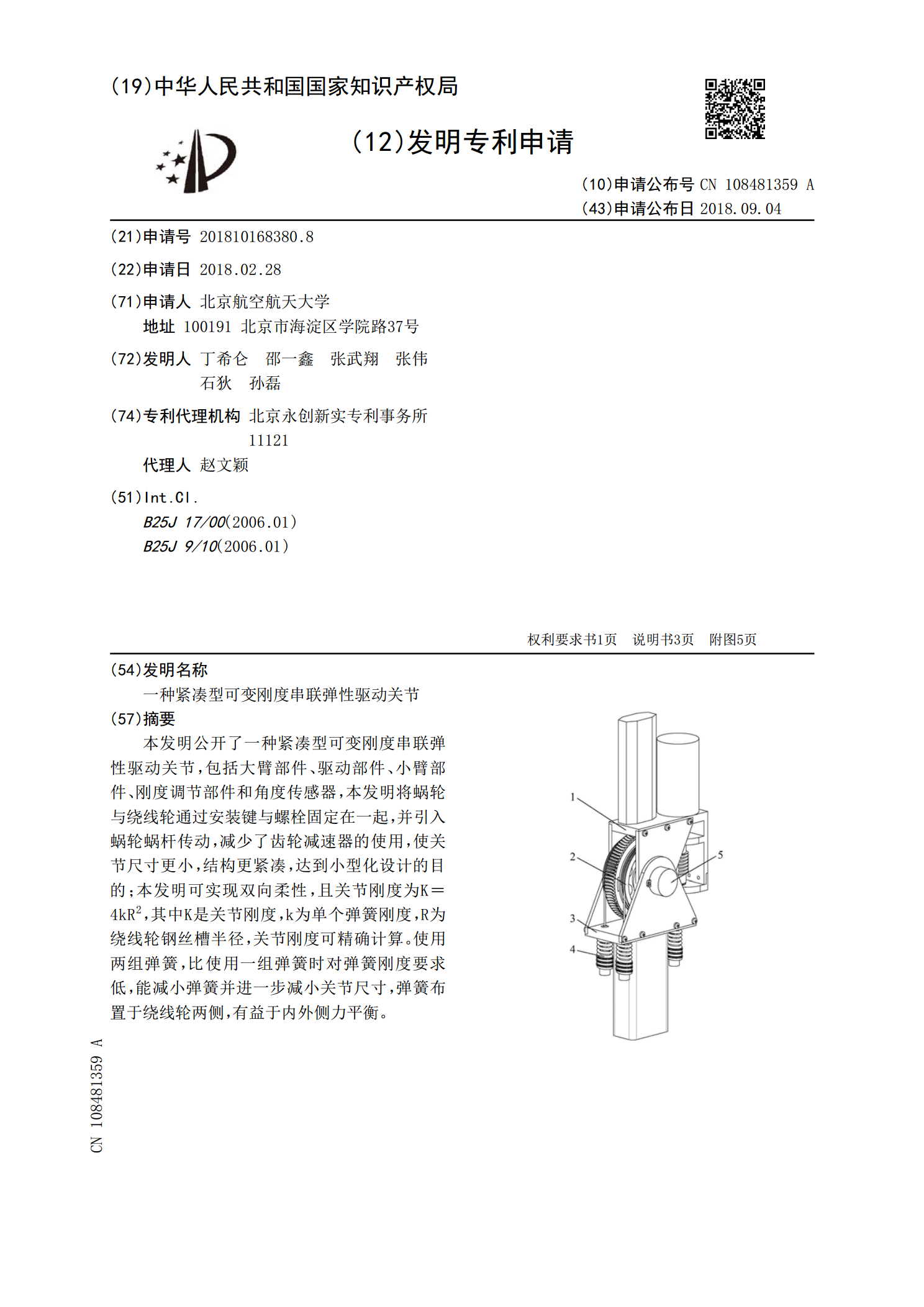
一种紧凑型可变刚度串联弹性驱动关节.pdf
本发明公开了一种紧凑型可变刚度串联弹性驱动关节,包括大臂部件、驱动部件、小臂部件、刚度调节部件和角度传感器,本发明将蜗轮与绕线轮通过安装键与螺栓固定在一起,并引入蜗轮蜗杆传动,减少了齿轮减速器的使用,使关节尺寸更小,结构更紧凑,达到小型化设计的目的;本发明可实现双向柔性,且关节刚度为K=4kR

可变截面扫描.doc
可变截面扫描(VariableSectionSweep),单从名字来看我们就知道它的精髓在于一个可变。这是因为可变截面扫描除了可以得到相对规则的曲面外,它丰富的控制属性和可以预见的结果形状让它更能在适当的场合发挥作用。3.6.1.可变截面扫描(VariableSectionSweep)的构成可变截面扫描的控制主要有下面的几项:轨迹(Trajectory),截面的定向和截面的形状。轨迹,在可变截面扫描中有两类轨迹,有且只有一条称之为原始轨迹(Origin)也就是你第一条选择的轨迹,原始轨迹必须是一条相切的曲
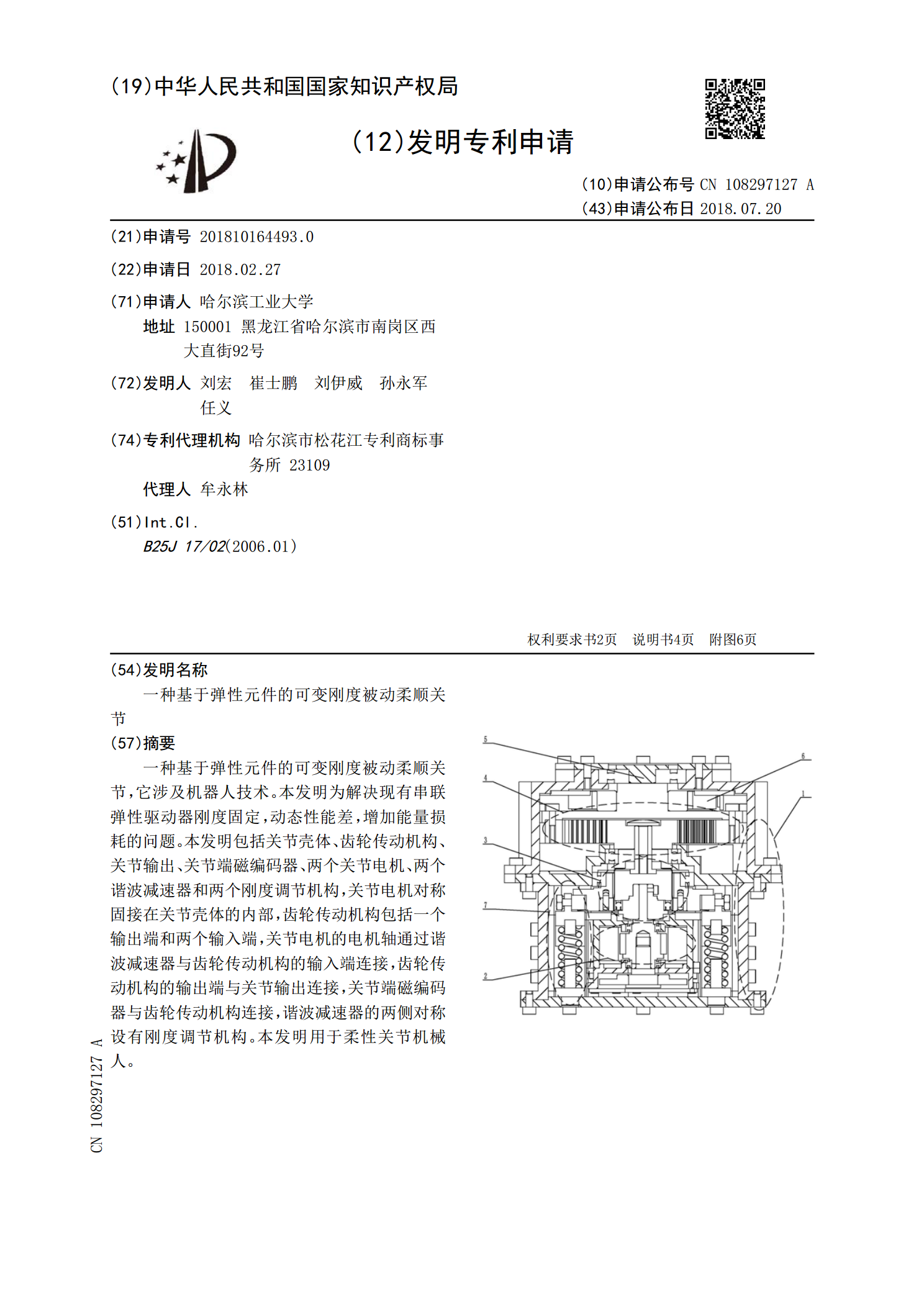
一种基于弹性元件的可变刚度被动柔顺关节.pdf
一种基于弹性元件的可变刚度被动柔顺关节,它涉及机器人技术。本发明为解决现有串联弹性驱动器刚度固定,动态性能差,增加能量损耗的问题。本发明包括关节壳体、齿轮传动机构、关节输出、关节端磁编码器、两个关节电机、两个谐波减速器和两个刚度调节机构,关节电机对称固接在关节壳体的内部,齿轮传动机构包括一个输出端和两个输入端,关节电机的电机轴通过谐波减速器与齿轮传动机构的输入端连接,齿轮传动机构的输出端与关节输出连接,关节端磁编码器与齿轮传动机构连接,谐波减速器的两侧对称设有刚度调节机构。本发明用于柔性关节机械人。