
一种自锁式仿生膝关节外骨骼装置.pdf

一条****丹淑

1/9
2/9

3/9
4/9
5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种自锁式仿生膝关节外骨骼装置.pdf
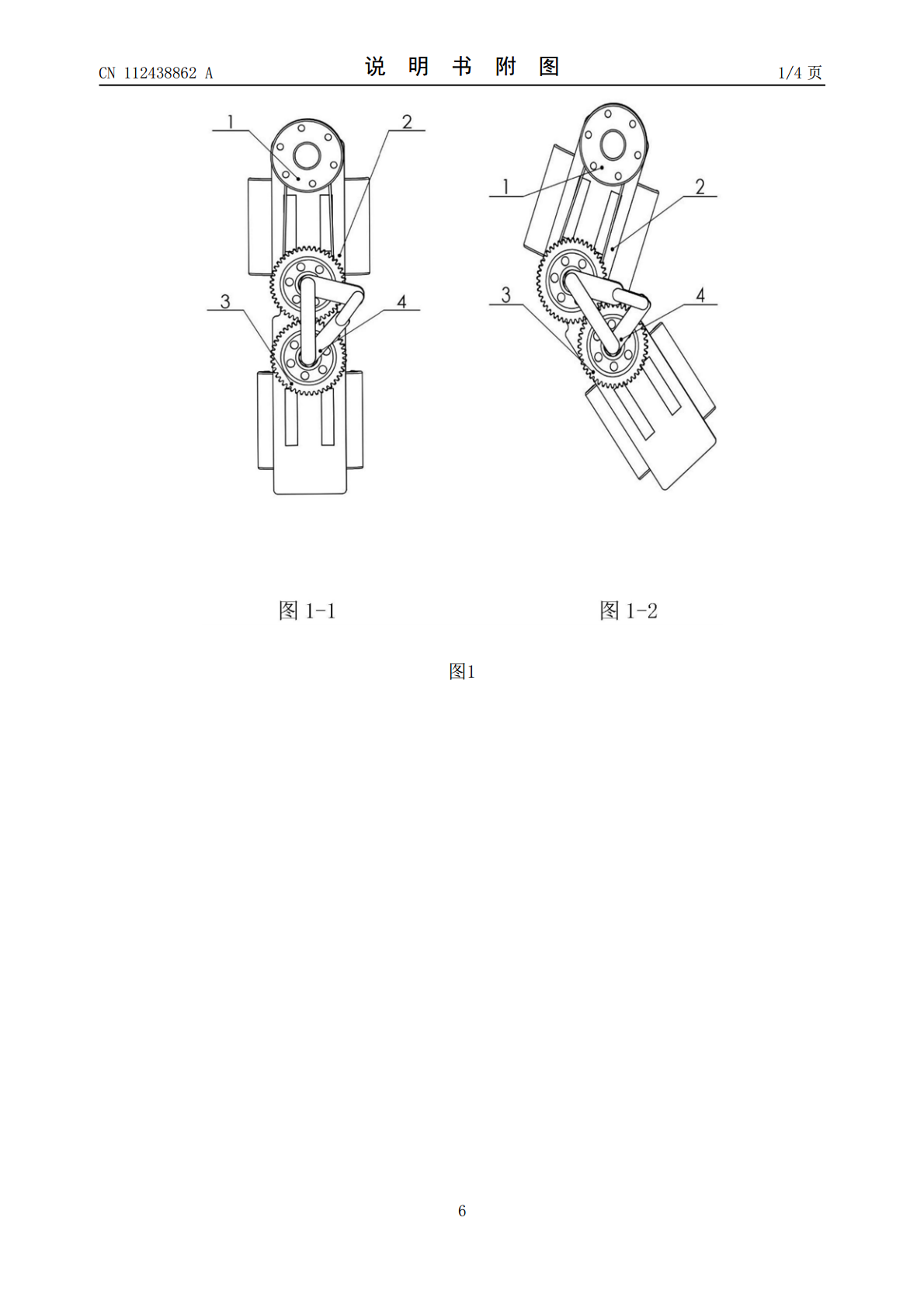
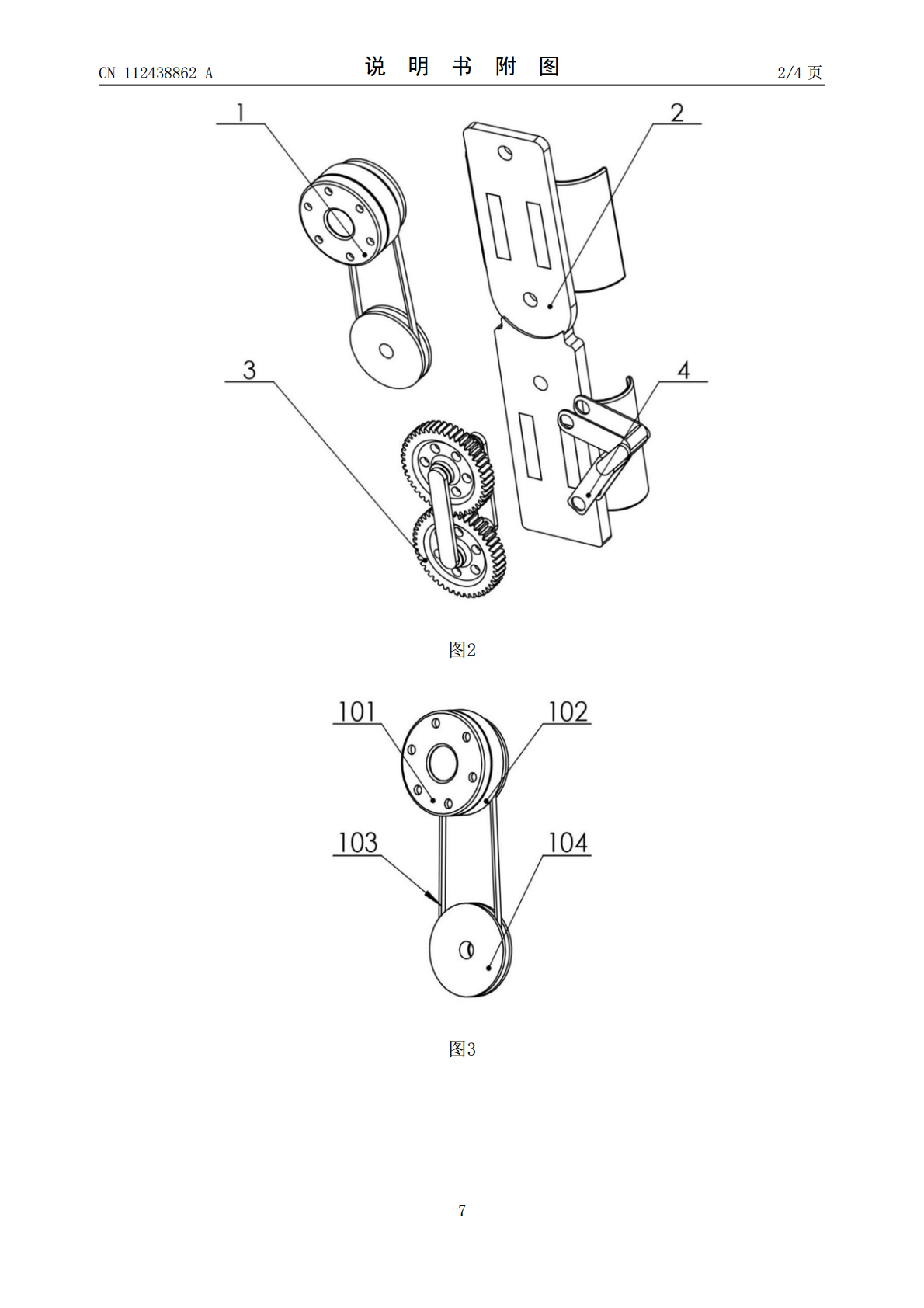
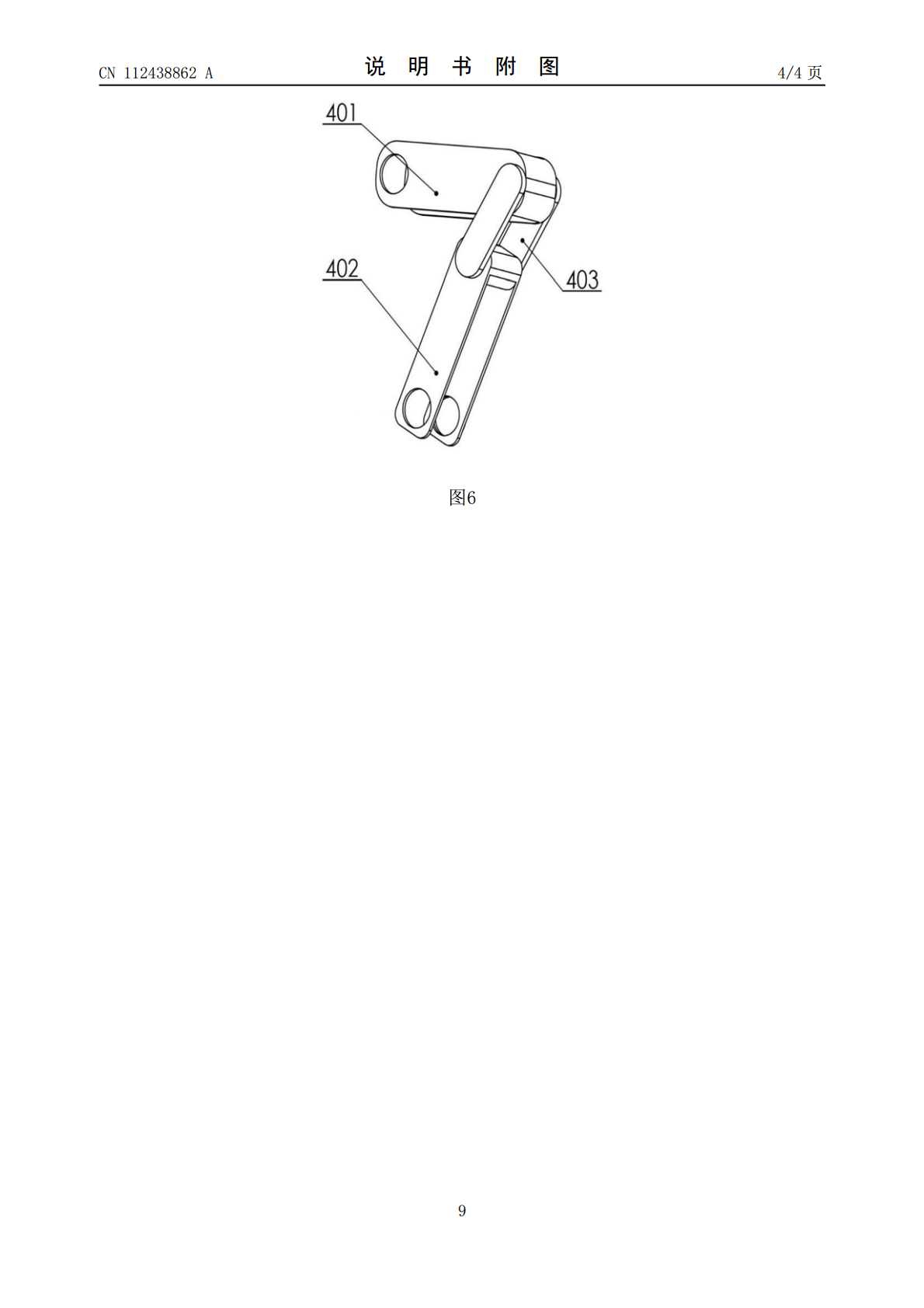
本发明公开了一种自锁式仿生膝关节外骨骼装置,其包括驱动机构(1)、膝关节支撑杆(2)、膝关节机构(3)、自锁机构(4),所述膝关节支撑杆(2)之间设置所述膝关节机构(3),所述膝关节机构(3)之间设置所述自锁机构(4),所述自锁机构(4)为所述四连杆机构,所述上连杆一端与膝关节大腿支撑杆相连,所述下连杆另一端与膝关节小腿支撑杆相连,所述的驱动机构(1)与所述膝关节支撑杆(2)的膝关节大腿支撑杆连接,所述的驱动机构(1)包括电机和所述电机相连接的谐波减速器以及滑轮组。本发明具有结构简单可靠、传动精度高、仿生
一种刚柔耦合仿生外骨骼膝关节助力装置.pdf
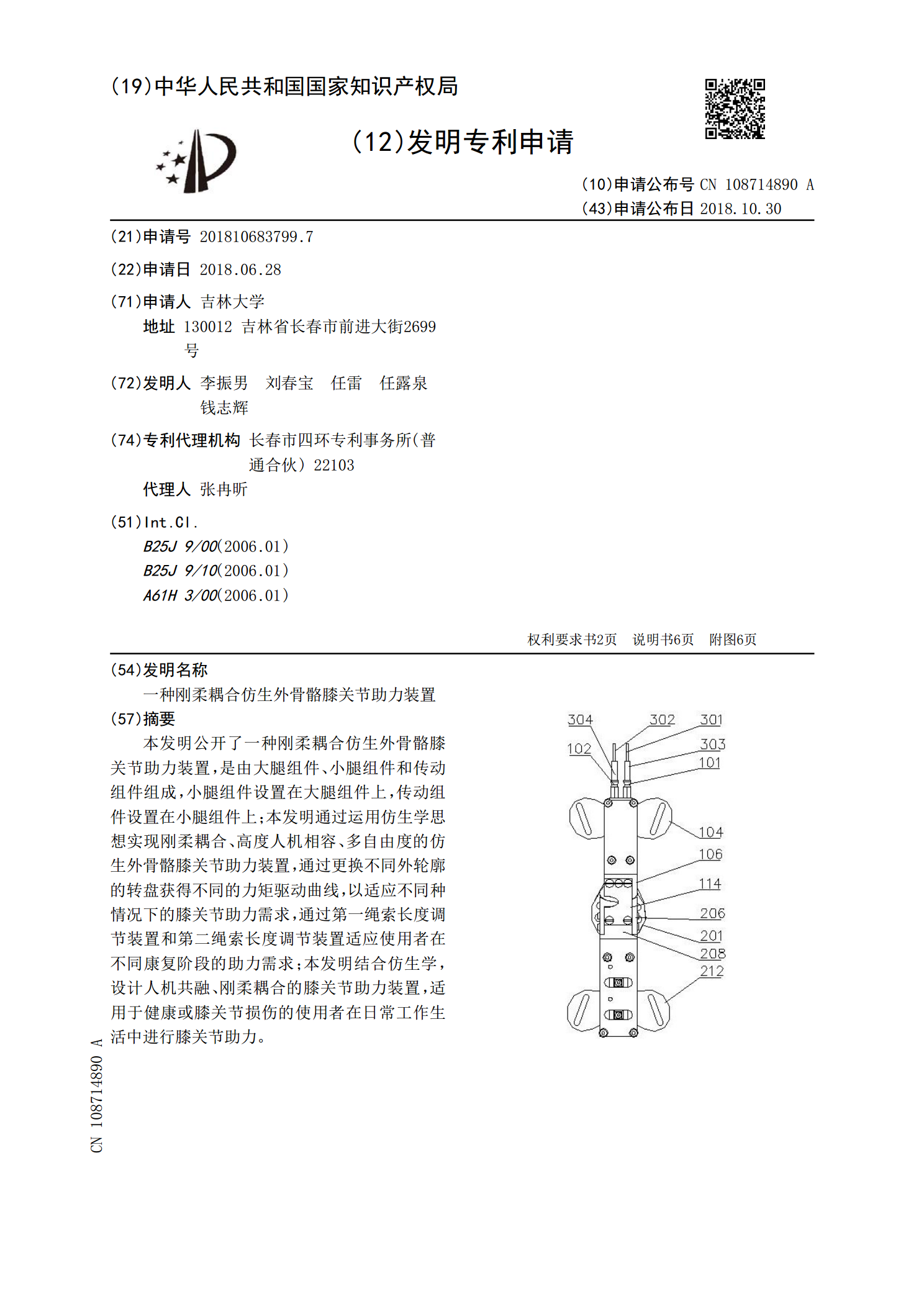
本发明公开了一种刚柔耦合仿生外骨骼膝关节助力装置,是由大腿组件、小腿组件和传动组件组成,小腿组件设置在大腿组件上,传动组件设置在小腿组件上;本发明通过运用仿生学思想实现刚柔耦合、高度人机相容、多自由度的仿生外骨骼膝关节助力装置,通过更换不同外轮廓的转盘获得不同的力矩驱动曲线,以适应不同种情况下的膝关节助力需求,通过第一绳索长度调节装置和第二绳索长度调节装置适应使用者在不同康复阶段的助力需求;本发明结合仿生学,设计人机共融、刚柔耦合的膝关节助力装置,适用于健康或膝关节损伤的使用者在日常工作生活中进行膝关节助
一种基于人体膝关节结构的仿生外骨骼装置.pdf
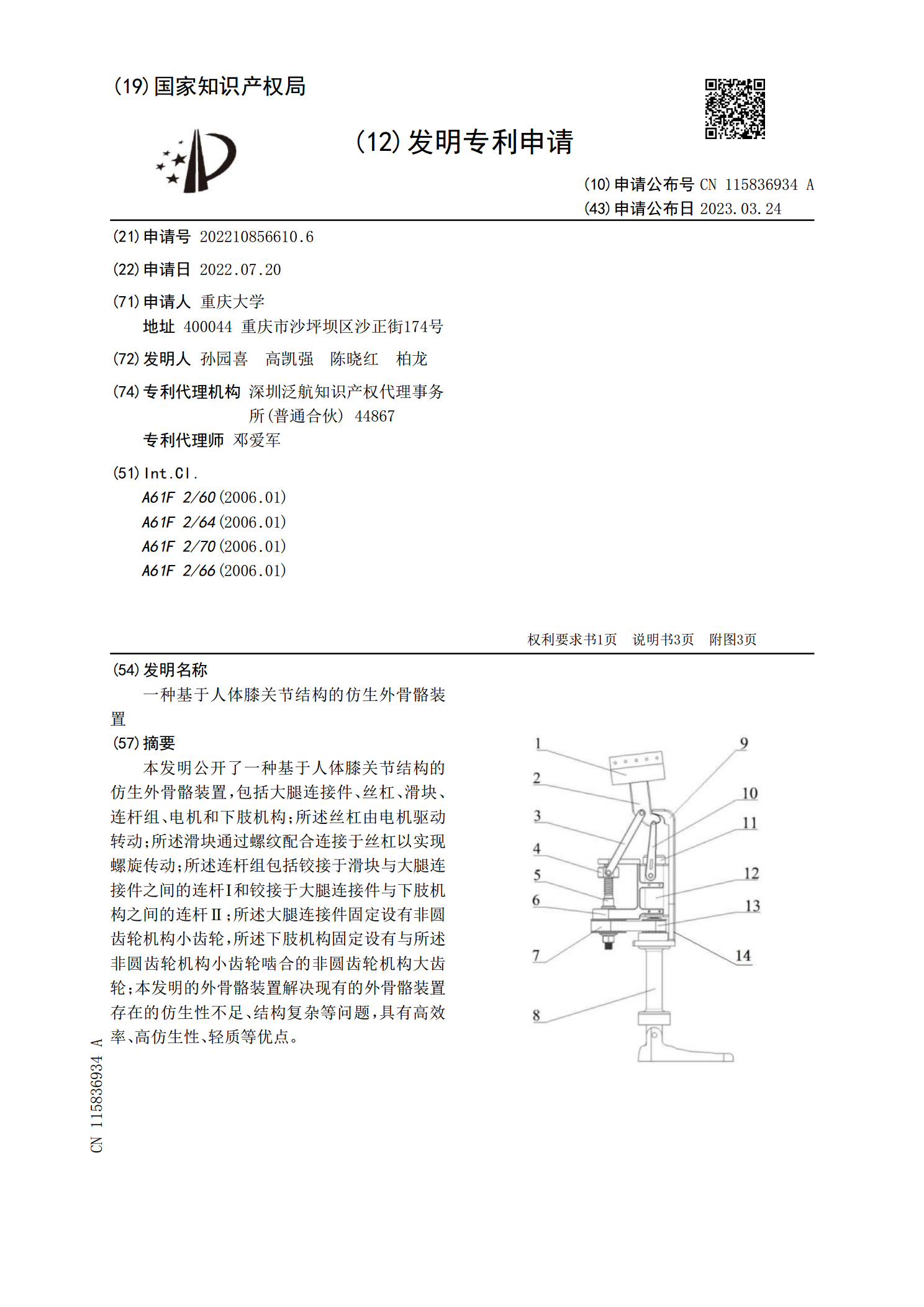
本发明公开了一种基于人体膝关节结构的仿生外骨骼装置,包括大腿连接件、丝杠、滑块、连杆组、电机和下肢机构;所述丝杠由电机驱动转动;所述滑块通过螺纹配合连接于丝杠以实现螺旋传动;所述连杆组包括铰接于滑块与大腿连接件之间的连杆Ⅰ和铰接于大腿连接件与下肢机构之间的连杆Ⅱ;所述大腿连接件固定设有非圆齿轮机构小齿轮,所述下肢机构固定设有与所述非圆齿轮机构小齿轮啮合的非圆齿轮机构大齿轮;本发明的外骨骼装置解决现有的外骨骼装置存在的仿生性不足、结构复杂等问题,具有高效率、高仿生性、轻质等优点。
一种仿生外骨骼脊柱装置.pdf
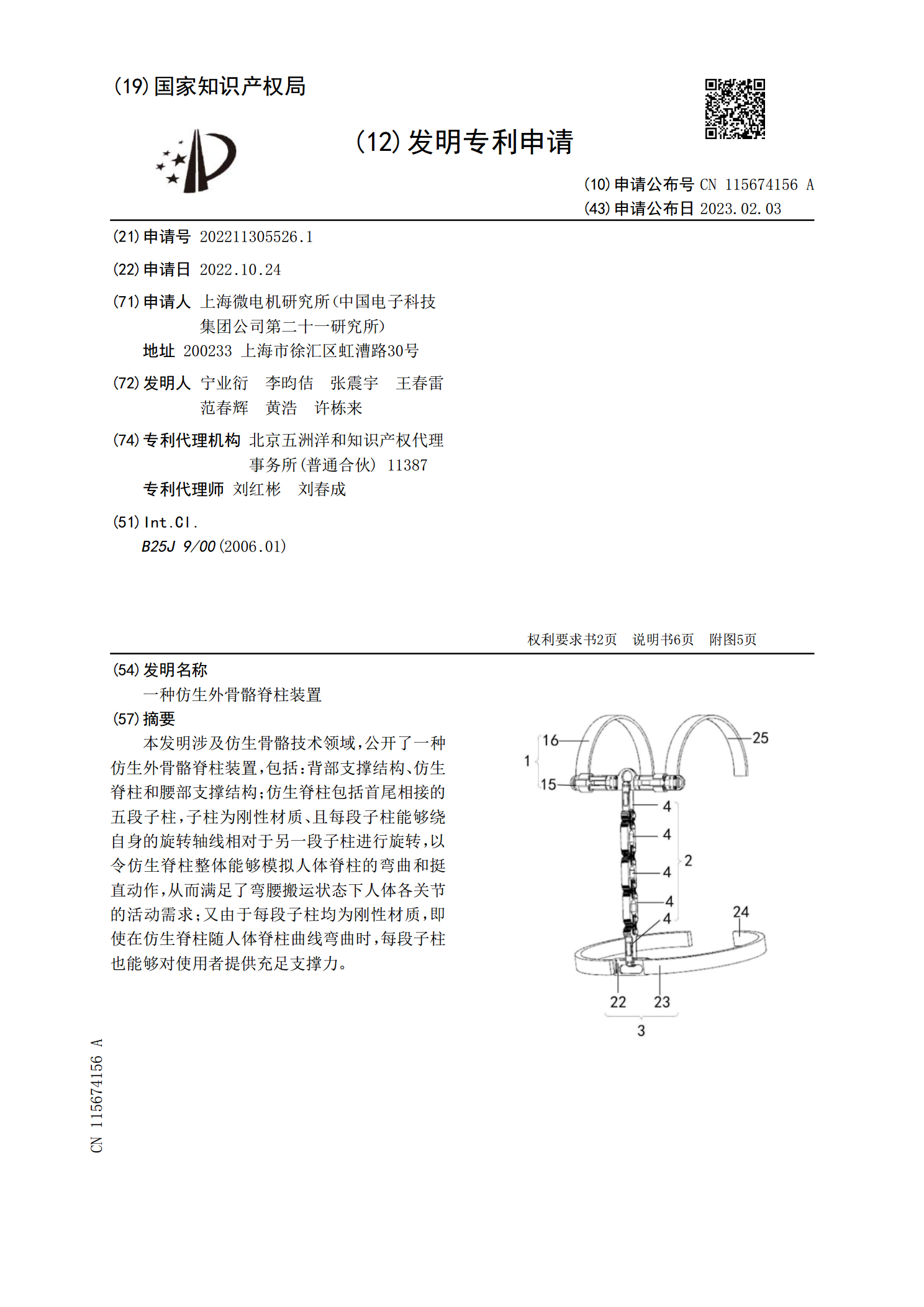
本发明涉及仿生骨骼技术领域,公开了一种仿生外骨骼脊柱装置,包括:背部支撑结构、仿生脊柱和腰部支撑结构;仿生脊柱包括首尾相接的五段子柱,子柱为刚性材质、且每段子柱能够绕自身的旋转轴线相对于另一段子柱进行旋转,以令仿生脊柱整体能够模拟人体脊柱的弯曲和挺直动作,从而满足了弯腰搬运状态下人体各关节的活动需求;又由于每段子柱均为刚性材质,即使在仿生脊柱随人体脊柱曲线弯曲时,每段子柱也能够对使用者提供充足支撑力。
一种自锁式夹盘装置.pdf
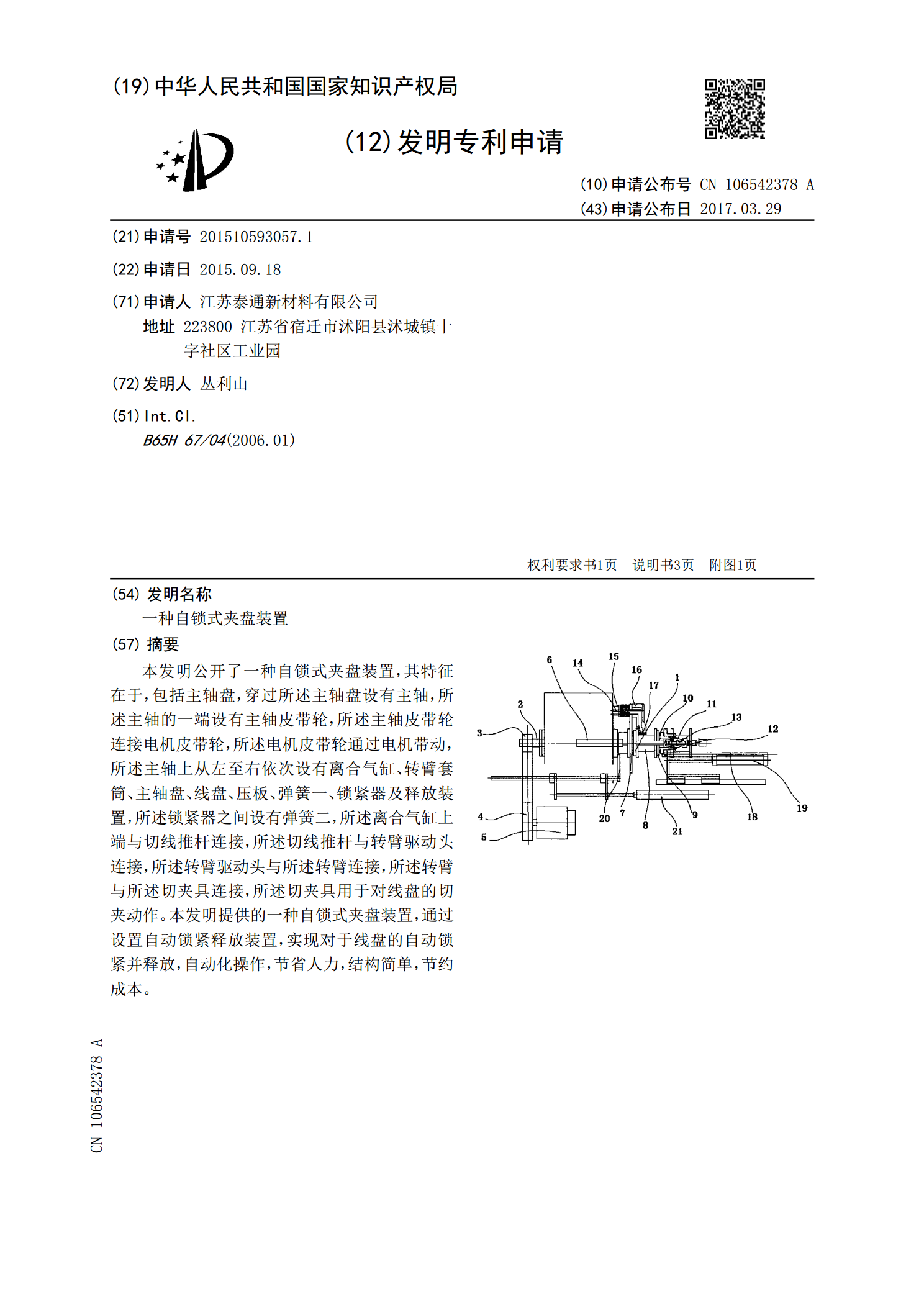
本发明公开了一种自锁式夹盘装置,其特征在于,包括主轴盘,穿过所述主轴盘设有主轴,所述主轴的一端设有主轴皮带轮,所述主轴皮带轮连接电机皮带轮,所述电机皮带轮通过电机带动,所述主轴上从左至右依次设有离合气缸、转臂套筒、主轴盘、线盘、压板、弹簧一、锁紧器及释放装置,所述锁紧器之间设有弹簧二,所述离合气缸上端与切线推杆连接,所述切线推杆与转臂驱动头连接,所述转臂驱动头与所述转臂连接,所述转臂与所述切夹具连接,所述切夹具用于对线盘的切夹动作。本发明提供的一种自锁式夹盘装置,通过设置自动锁紧释放装置,实现对于线盘的自