
一种工业机器人用减震装置.pdf

静芙****可爱


1/7
2/7
3/7

4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种工业机器人用减震装置.pdf
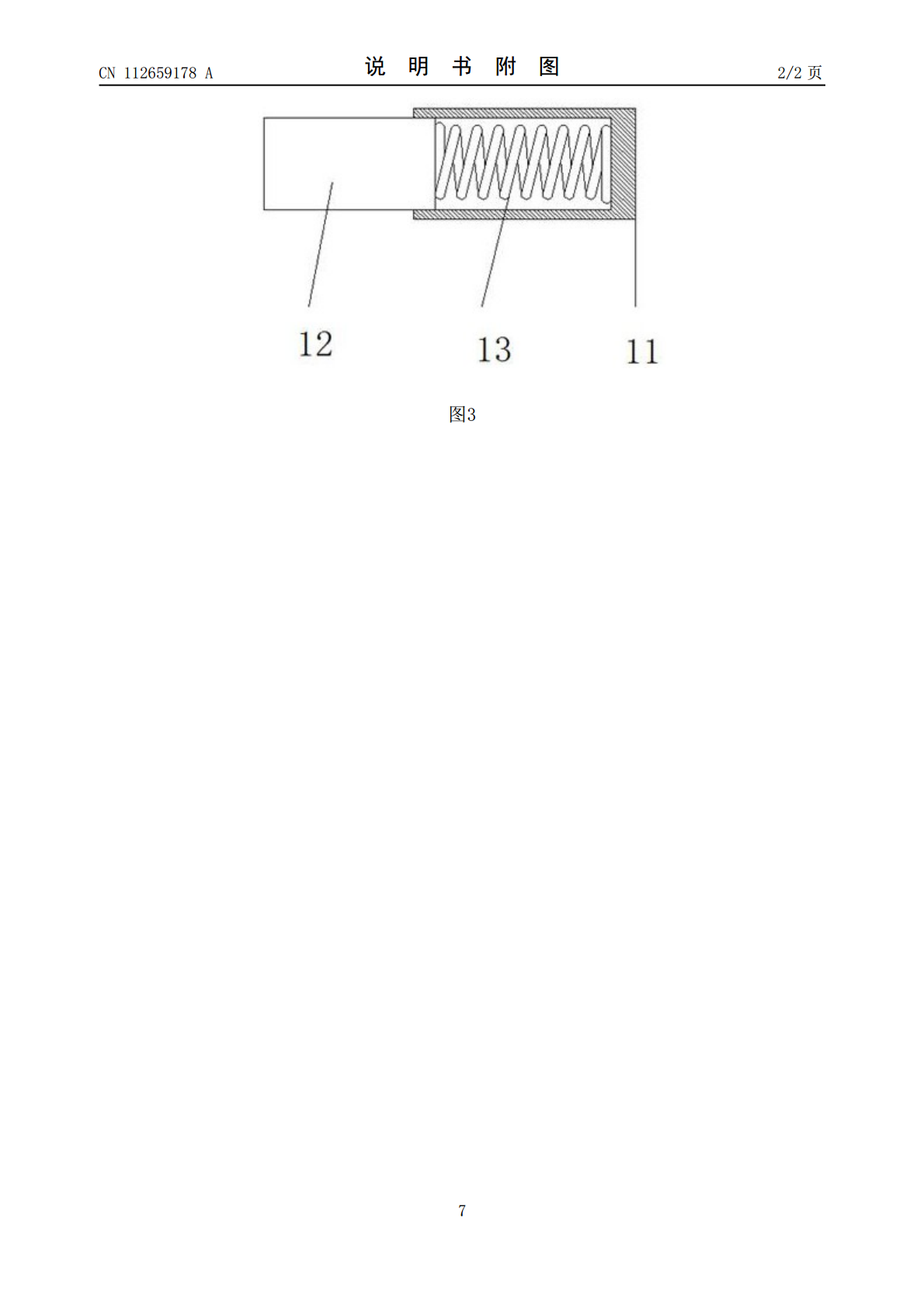
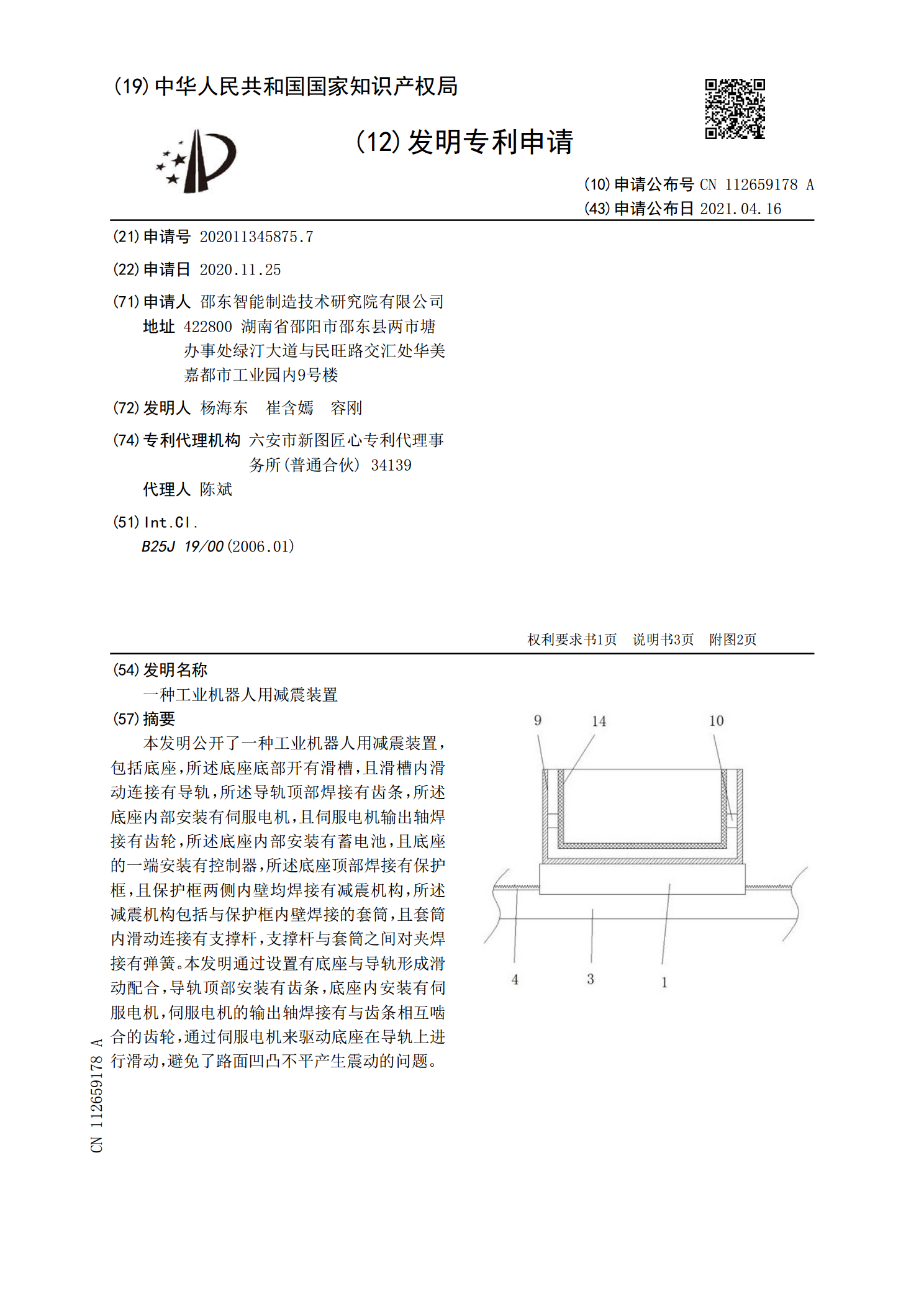
本发明公开了一种工业机器人用减震装置,包括底座,所述底座底部开有滑槽,且滑槽内滑动连接有导轨,所述导轨顶部焊接有齿条,所述底座内部安装有伺服电机,且伺服电机输出轴焊接有齿轮,所述底座内部安装有蓄电池,且底座的一端安装有控制器,所述底座顶部焊接有保护框,且保护框两侧内壁均焊接有减震机构,所述减震机构包括与保护框内壁焊接的套筒,且套筒内滑动连接有支撑杆,支撑杆与套筒之间对夹焊接有弹簧。本发明通过设置有底座与导轨形成滑动配合,导轨顶部安装有齿条,底座内安装有伺服电机,伺服电机的输出轴焊接有与齿条相互啮合的齿轮,
一种工业计算机用减震装置.pdf
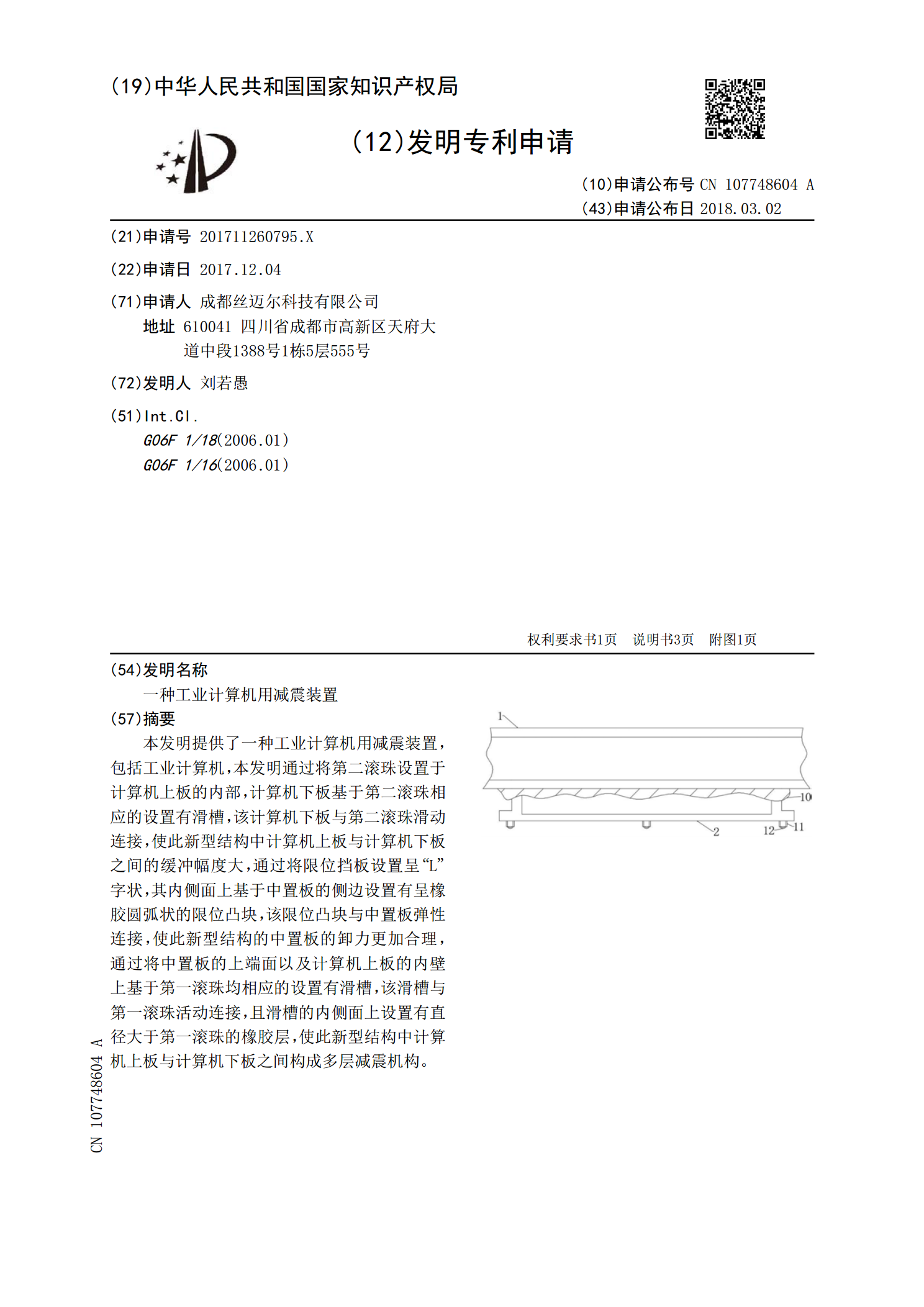
本发明提供了一种工业计算机用减震装置,包括工业计算机,本发明通过将第二滚珠设置于计算机上板的内部,计算机下板基于第二滚珠相应的设置有滑槽,该计算机下板与第二滚珠滑动连接,使此新型结构中计算机上板与计算机下板之间的缓冲幅度大,通过将限位挡板设置呈“L”字状,其内侧面上基于中置板的侧边设置有呈橡胶圆弧状的限位凸块,该限位凸块与中置板弹性连接,使此新型结构的中置板的卸力更加合理,通过将中置板的上端面以及计算机上板的内壁上基于第一滚珠均相应的设置有滑槽,该滑槽与第一滚珠活动连接,且滑槽的内侧面上设置有直径大于第一
一种工业机器人减震底座.pdf
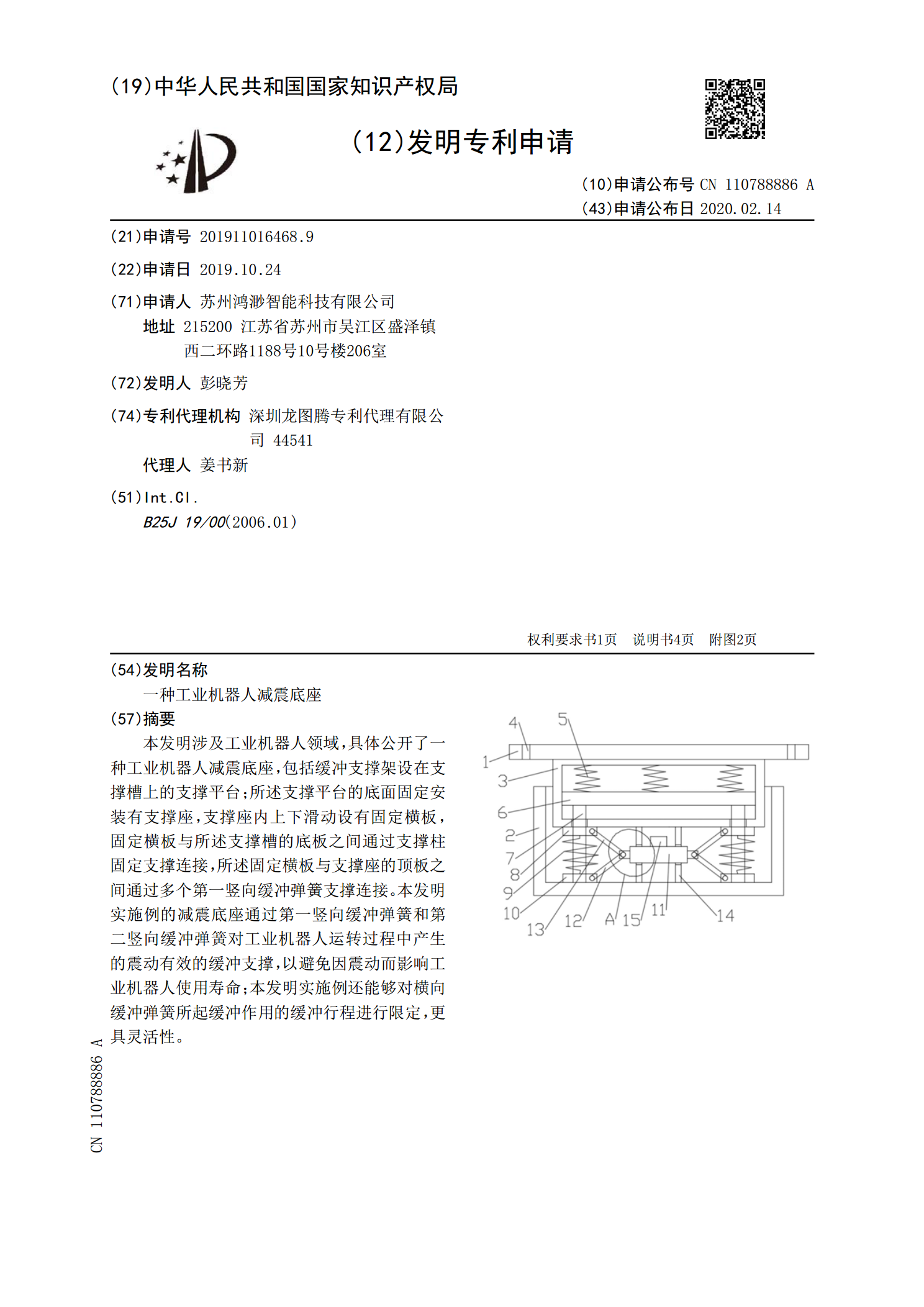
本发明涉及工业机器人领域,具体公开了一种工业机器人减震底座,包括缓冲支撑架设在支撑槽上的支撑平台;所述支撑平台的底面固定安装有支撑座,支撑座内上下滑动设有固定横板,固定横板与所述支撑槽的底板之间通过支撑柱固定支撑连接,所述固定横板与支撑座的顶板之间通过多个第一竖向缓冲弹簧支撑连接。本发明实施例的减震底座通过第一竖向缓冲弹簧和第二竖向缓冲弹簧对工业机器人运转过程中产生的震动有效的缓冲支撑,以避免因震动而影响工业机器人使用寿命;本发明实施例还能够对横向缓冲弹簧所起缓冲作用的缓冲行程进行限定,更具灵活性。

一种减震型工业用操作控制台装置.pdf
一种减震型工业用操作控制台装置,包括控制台本体(8)以及与所述控制台本体(8)连接的显示面板(9),其中,所述控制台本体(8)包括壳体部件(80),所述壳体部件(80)的内腔中固定设置有用于可转动地安装驱动小齿轮(811)的第一轴(81)以及水平高度高于所述第一轴(81)的用于可转动地安装与所述显示面板(9)的分开设置的两个底部固连腿部(91)同时固定连接的从动大齿轮套筒(821)的第二轴(82)。

一种工业机器人用调节装置.pdf
本发明公开了一种工业机器人用调节装置,包括底座,所述底座上设置有滑动板,且滑动板与底座之间设置有移动机构。本发明所述的一种工业机器人用调节装置,属于工业机器人设备技术领域,通过设置的固定结构,将油缸设置在支架的内侧,既可以节省空间,又能够起到一定的防护效果,支撑架可以对油缸起到支撑的作用,保证油缸的稳固性,同时可以进行一定的调节,使用灵活性高,吹气结构可以起到对滑轨进行清灰效果,保证滑块能够顺畅的沿着滑轨移动,利用联动杆与驱动板相连接,在驱动板带着连接板升降的过程中,可以驱动着吹气结构运行,不需要另外设置