
一种基于计算机视觉的机器人激光清洗路径规划装置.pdf

淑然****by

1/10
2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于计算机视觉的机器人激光清洗路径规划装置.pdf
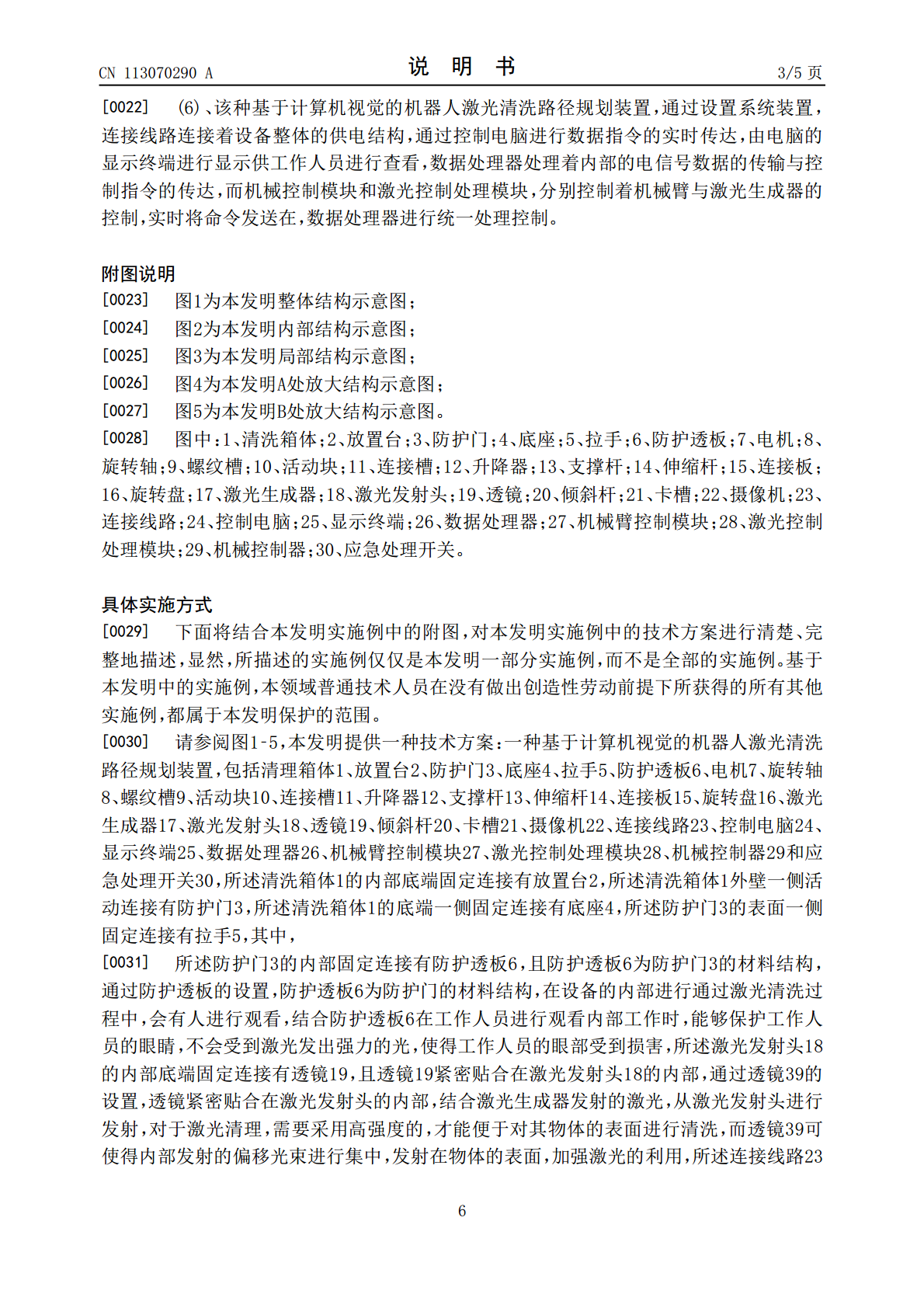
本发明公开了一种基于计算机视觉的机器人激光清洗路径规划装置,包括清洗箱体的外围顶部一侧固定连接有电机,电机的一侧活动连接有旋转轴,旋转轴的表面固定连接有螺纹槽,旋转轴的外围活动连接有活动块,活动块的底端固定连接有连接槽,连接槽的内部固定连接有升降器,升降器的底部活动连接有支撑杆,支撑杆的内部活动连接有伸缩杆,电机的一侧安装有旋转轴,活动块是活动安装在旋转轴上的,内部也具有螺纹槽,进行相互配合,结合电机的启动(正反转),来带动活动块进行左右移动,连接槽的内部具有升降器,底部安装有支撑杆,支撑杆的内部具有伸缩

基于视觉测量的机器人激光焊接信息获取及路径规划.docx
基于视觉测量的机器人激光焊接信息获取及路径规划摘要伴随着工业自动化和智能制造的快速发展,机器人激光焊接技术已经广泛应用于汽车制造、飞机制造、轨道交通等领域。由于激光焊接过程中还存在一些不确定因素,如工件规格、结构形式、焊接材料和环境因素等,导致常规焊接的路径规划难以适应复杂的焊接情况。本论文将探讨基于视觉测量的机器人激光焊接信息获取及路径规划的研究进展和应用现状,并重点分析机器人激光焊接路径规划的基本原理、方法和优化策略。基于此,总结并提出提高机器人激光焊接效率和精度的技术和措施,以期为机器人激光焊接技术

基于视觉测量的机器人激光焊接信息获取及路径规划的综述报告.docx
基于视觉测量的机器人激光焊接信息获取及路径规划的综述报告近年来,机器人激光焊接已成为不可或缺的工业制造技术之一。然而,机器人的精度和轨迹控制往往受到环境扰动和复杂性的影响,导致激光焊接过程中出现错误和不良质量。因此,如何精确获取机器人激光焊接信息和优化路径规划成为了研究的重点之一。本文将探讨基于视觉测量的机器人激光焊接信息获取及路径规划的相关技术和研究进展。一、机器人激光焊接信息获取技术机器人激光焊接信息获取技术主要有传感器和视觉两种方式。传感器的主要优点是能够快速获取数据并实现实时控制。然而,传感器并不
一种基于计算机视觉的光伏清洗机器人清洗速度调节方法.pdf
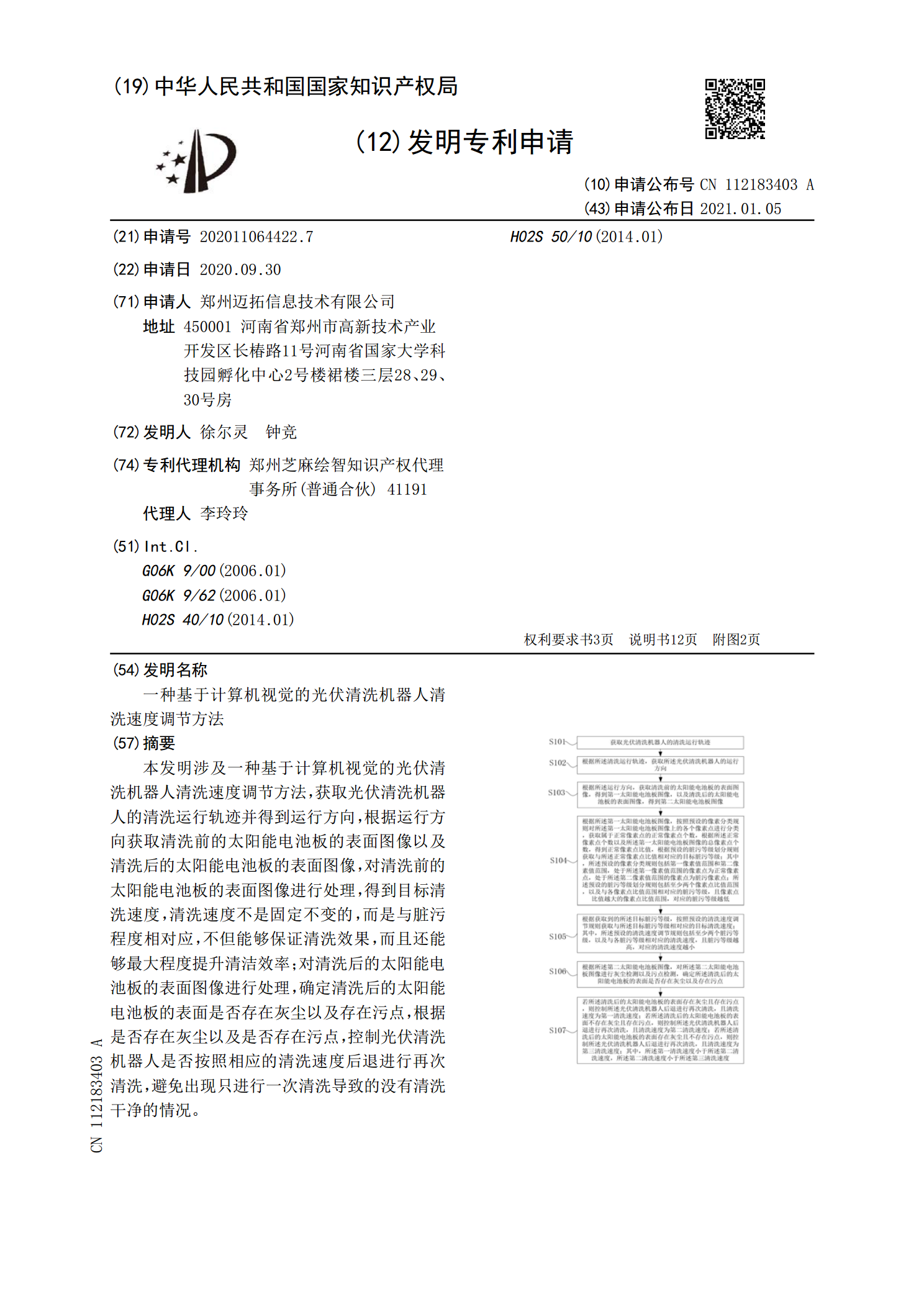
本发明涉及一种基于计算机视觉的光伏清洗机器人清洗速度调节方法,获取光伏清洗机器人的清洗运行轨迹并得到运行方向,根据运行方向获取清洗前的太阳能电池板的表面图像以及清洗后的太阳能电池板的表面图像,对清洗前的太阳能电池板的表面图像进行处理,得到目标清洗速度,清洗速度不是固定不变的,而是与脏污程度相对应,不但能够保证清洗效果,而且还能够最大程度提升清洁效率;对清洗后的太阳能电池板的表面图像进行处理,确定清洗后的太阳能电池板的表面是否存在灰尘以及存在污点,根据是否存在灰尘以及是否存在污点,控制光伏清洗机器人是否按照
基于视觉的混凝土振捣机器人路径规划方法.pdf
本发明提供了一种基于视觉的混凝土振捣机器人路径规划方法,包括:采集振捣区域图像,根据该图像获取振捣区域的振捣点位置;振捣机器人初始所在位置和振捣点所在位置即为起始点也为目标点,以随机树生长的方式对向交替生长规划振捣机器人路径;随机树生长方向包括:A、随机树一随机节点周围最近节点指向终点方向,B、随机树一随机节点周围最近节点指向该随机节点方向;在随机树的一次生长过程中,当沿生长方向A生成的最新节点与最近节点间存在障碍物时,随机树按照生长方向B生长;随机树最近节点指向的终点为另一随机树最新生成的节点。