
一种基于计算机视觉的光伏清洗机器人清洗速度调节方法.pdf

宏硕****mo

1/10
2/10
3/10
4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于计算机视觉的光伏清洗机器人清洗速度调节方法.pdf
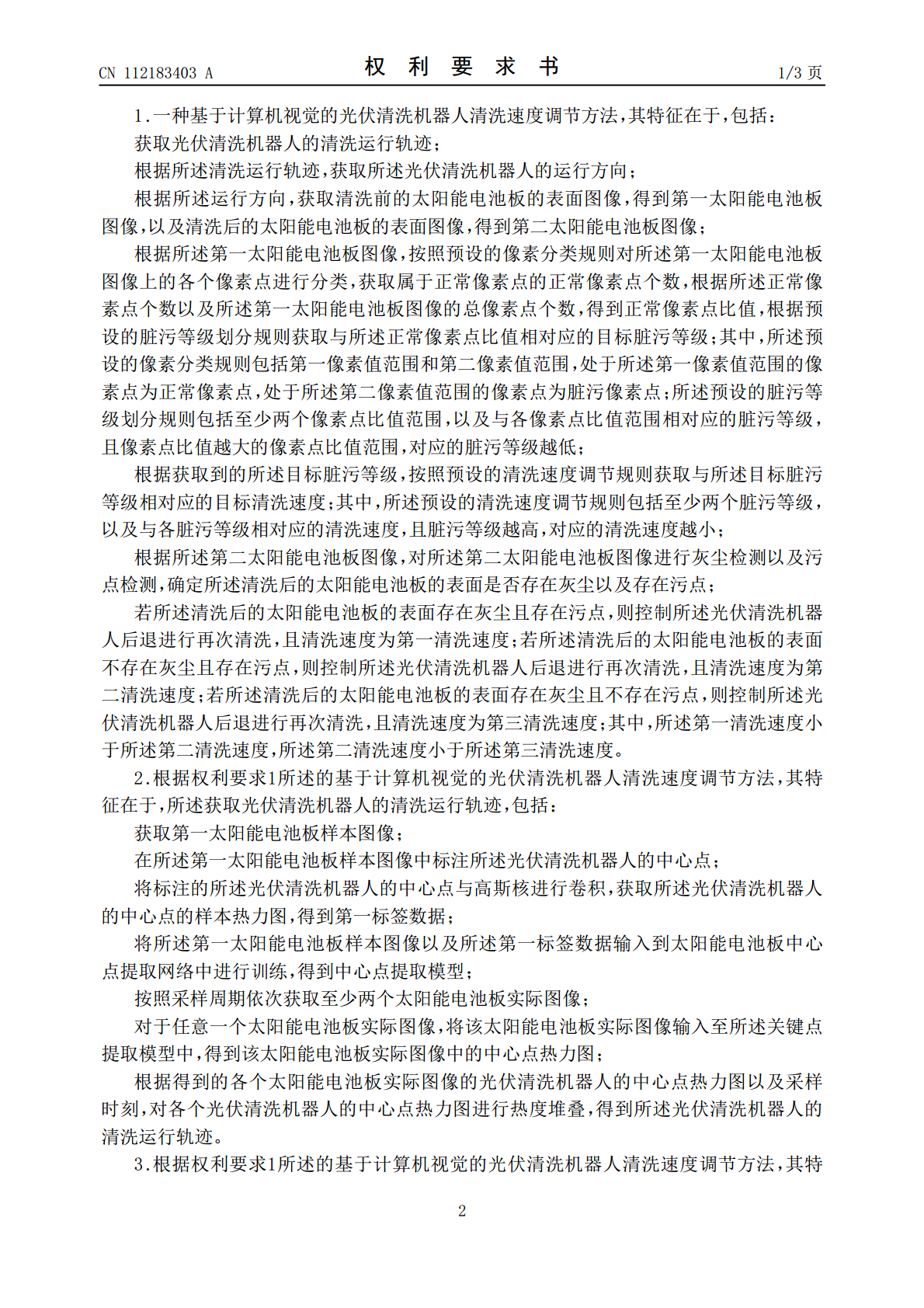
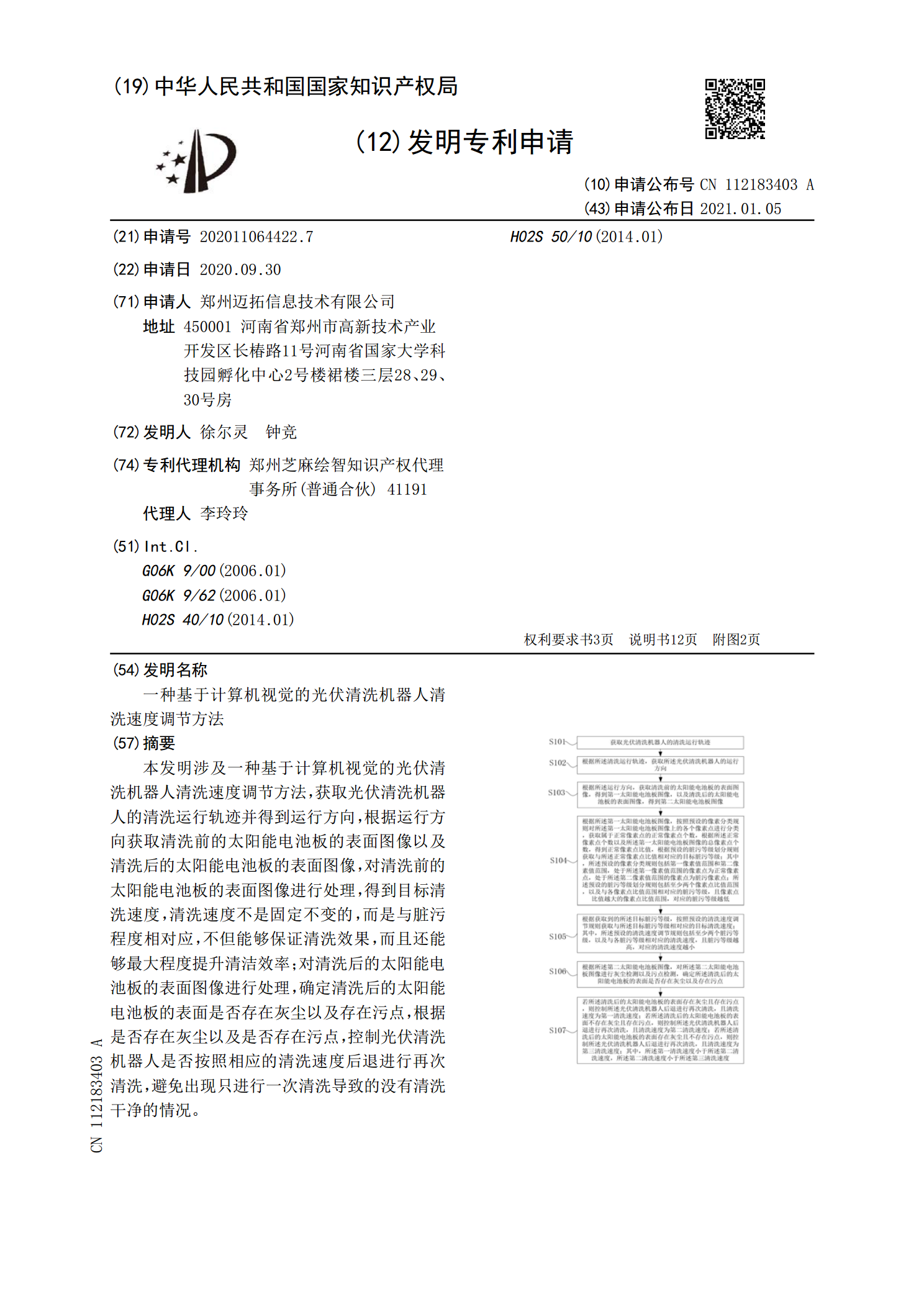
本发明涉及一种基于计算机视觉的光伏清洗机器人清洗速度调节方法,获取光伏清洗机器人的清洗运行轨迹并得到运行方向,根据运行方向获取清洗前的太阳能电池板的表面图像以及清洗后的太阳能电池板的表面图像,对清洗前的太阳能电池板的表面图像进行处理,得到目标清洗速度,清洗速度不是固定不变的,而是与脏污程度相对应,不但能够保证清洗效果,而且还能够最大程度提升清洁效率;对清洗后的太阳能电池板的表面图像进行处理,确定清洗后的太阳能电池板的表面是否存在灰尘以及存在污点,根据是否存在灰尘以及是否存在污点,控制光伏清洗机器人是否按照
一种光伏清洗机器人.pdf
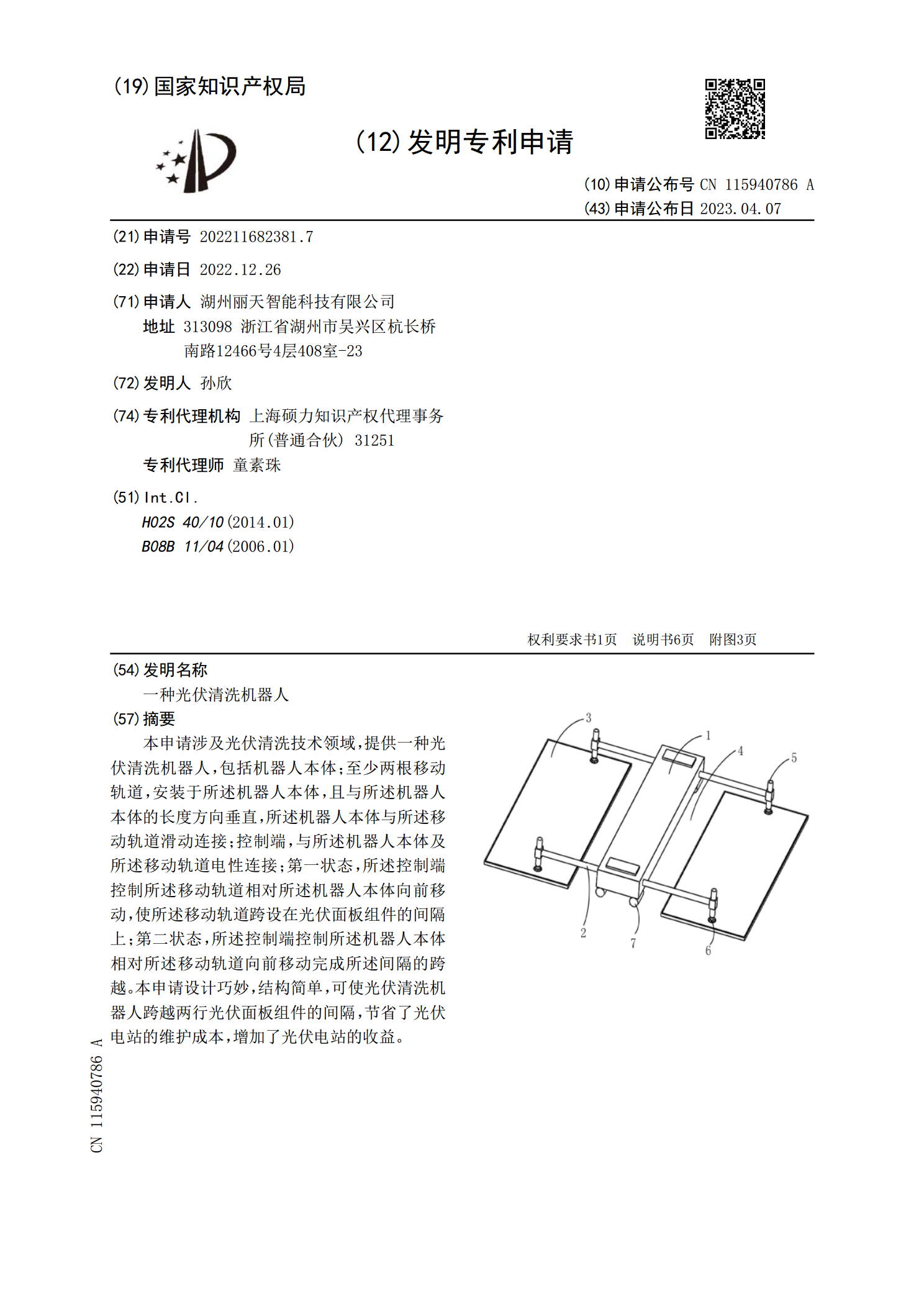
本申请涉及光伏清洗技术领域,提供一种光伏清洗机器人,包括机器人本体;至少两根移动轨道,安装于所述机器人本体,且与所述机器人本体的长度方向垂直,所述机器人本体与所述移动轨道滑动连接;控制端,与所述机器人本体及所述移动轨道电性连接;第一状态,所述控制端控制所述移动轨道相对所述机器人本体向前移动,使所述移动轨道跨设在光伏面板组件的间隔上;第二状态,所述控制端控制所述机器人本体相对所述移动轨道向前移动完成所述间隔的跨越。本申请设计巧妙,结构简单,可使光伏清洗机器人跨越两行光伏面板组件的间隔,节省了光伏电站的维护成
一种光伏清洗机器人使用方法.pdf
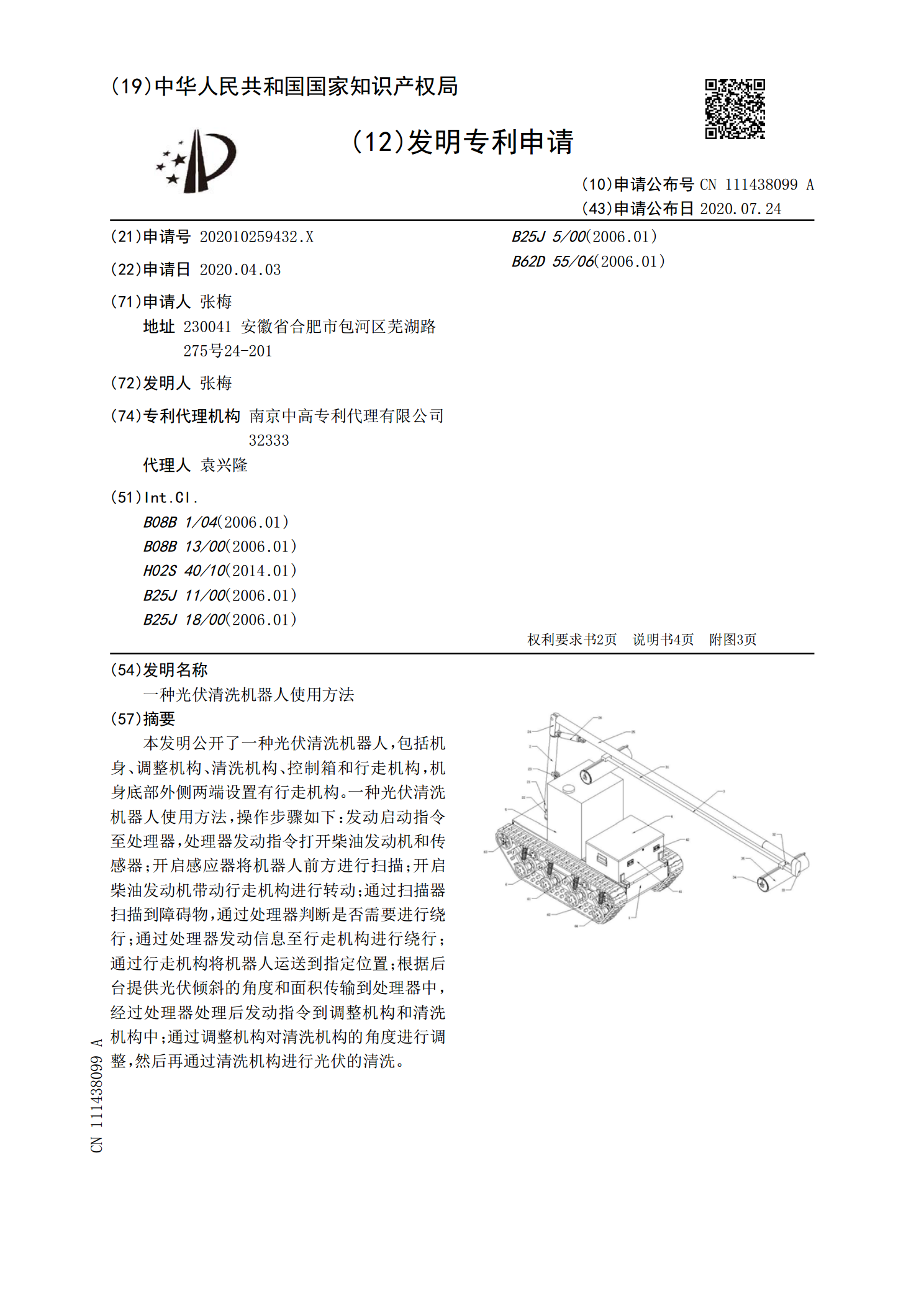
本发明公开了一种光伏清洗机器人,包括机身、调整机构、清洗机构、控制箱和行走机构,机身底部外侧两端设置有行走机构。一种光伏清洗机器人使用方法,操作步骤如下:发动启动指令至处理器,处理器发动指令打开柴油发动机和传感器;开启感应器将机器人前方进行扫描;开启柴油发动机带动行走机构进行转动;通过扫描器扫描到障碍物,通过处理器判断是否需要进行绕行;通过处理器发动信息至行走机构进行绕行;通过行走机构将机器人运送到指定位置;根据后台提供光伏倾斜的角度和面积传输到处理器中,经过处理器处理后发动指令到调整机构和清洗机构中;通

一种光伏面板清洗机器人.pdf
本发明公开了一种光伏面板清洗机器人,包括底盘、安装在底盘上的一对转向轮、一对万向轮和扶手,还包括回转装置、调整装置、清洗装置、供水装置和控制装置。所述回转装置包括固定安装在底盘上的回转支撑、工作台、和回转电机和回转齿轮等部件;所述调整装置包括升降部、旋转部和伸缩部;所述清洗装置包括移动部、喷淋部和第一清洗部和第二清洗部;所述供水装置包括水箱、设在水箱上回收槽和水泵等部件;所述控制装置包括单片机和控制面板。发明能够对光伏面板进行快速清洗,尤其在处理光伏电站这种光伏面板大量集中的情况,该特点更加明显。

基于视觉伺服控制的光伏板清洗系统设计.docx
基于视觉伺服控制的光伏板清洗系统设计摘要本论文介绍了一种基于视觉伺服控制的光伏板清洗系统设计。该系统可以自动清洗光伏板的表面,以提高太阳能发电效率。系统包括多个关键组件,如摄像头、运动控制卡和水泵。通过计算机视觉技术和伺服控制算法,该系统可以自动识别光伏板的位置和形状,并将清洗喷头放置在正确的位置,以完成清洗任务。实验结果表明,该系统可以高效地清洗光伏板表面,提高太阳能发电效率。关键词:视觉伺服控制;光伏板清洗;计算机视觉;伺服控制算法;太阳能发电引言随着全球能源需求的日益增长,绿色能源技术变得越来越重要