
基于视觉的混凝土振捣机器人路径规划方法.pdf

一吃****仪凡


1/10
2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于视觉的混凝土振捣机器人路径规划方法.pdf
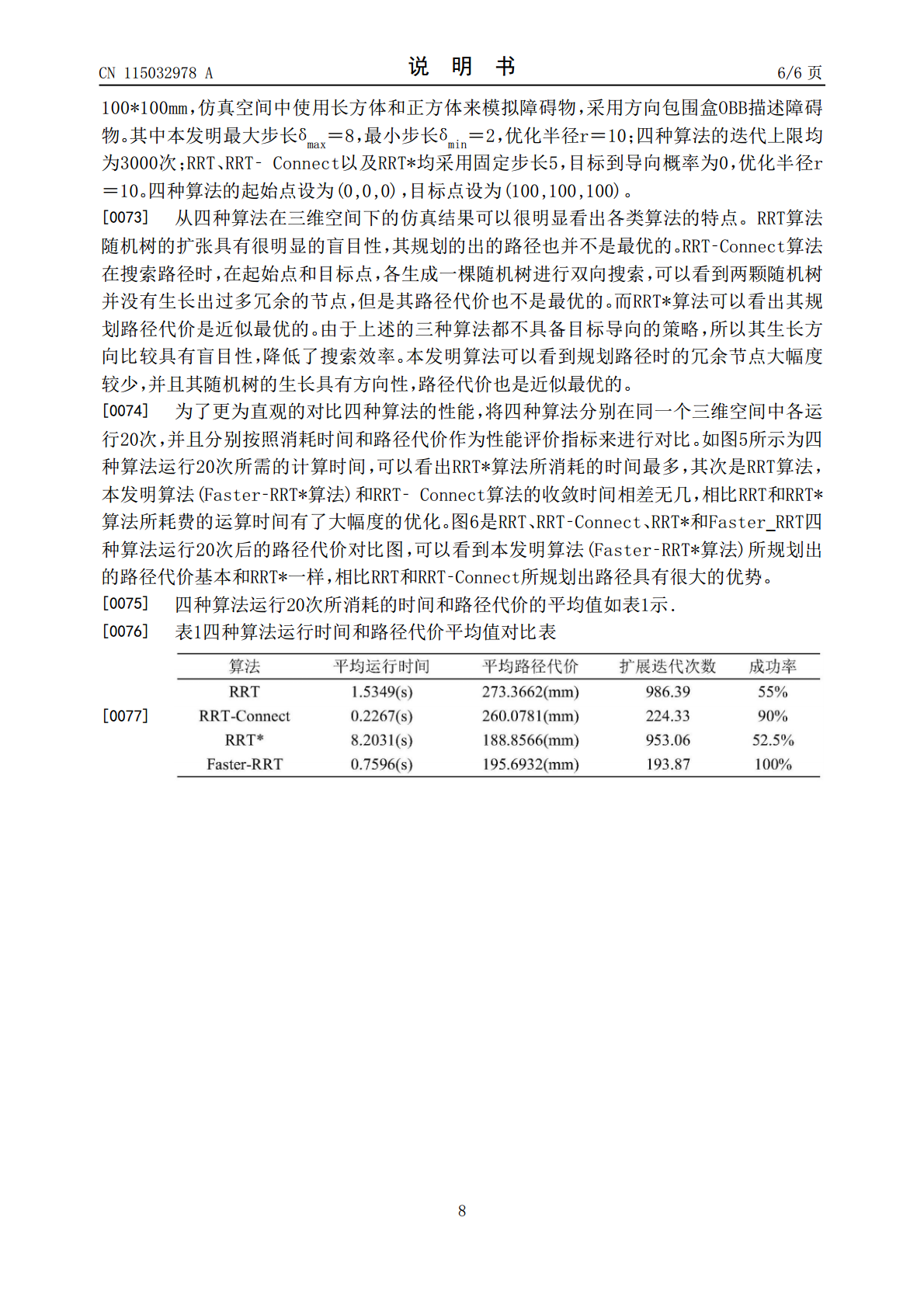
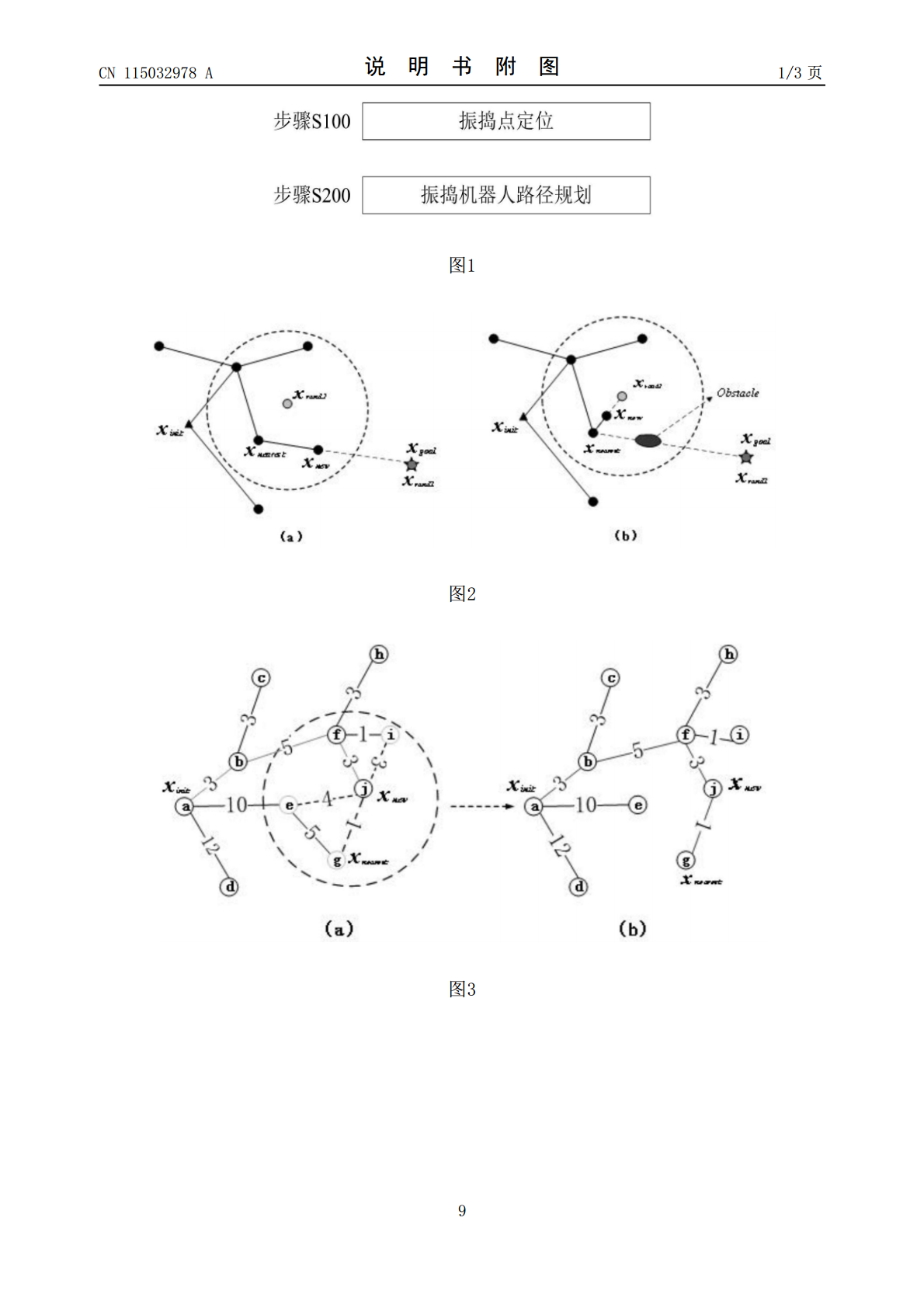
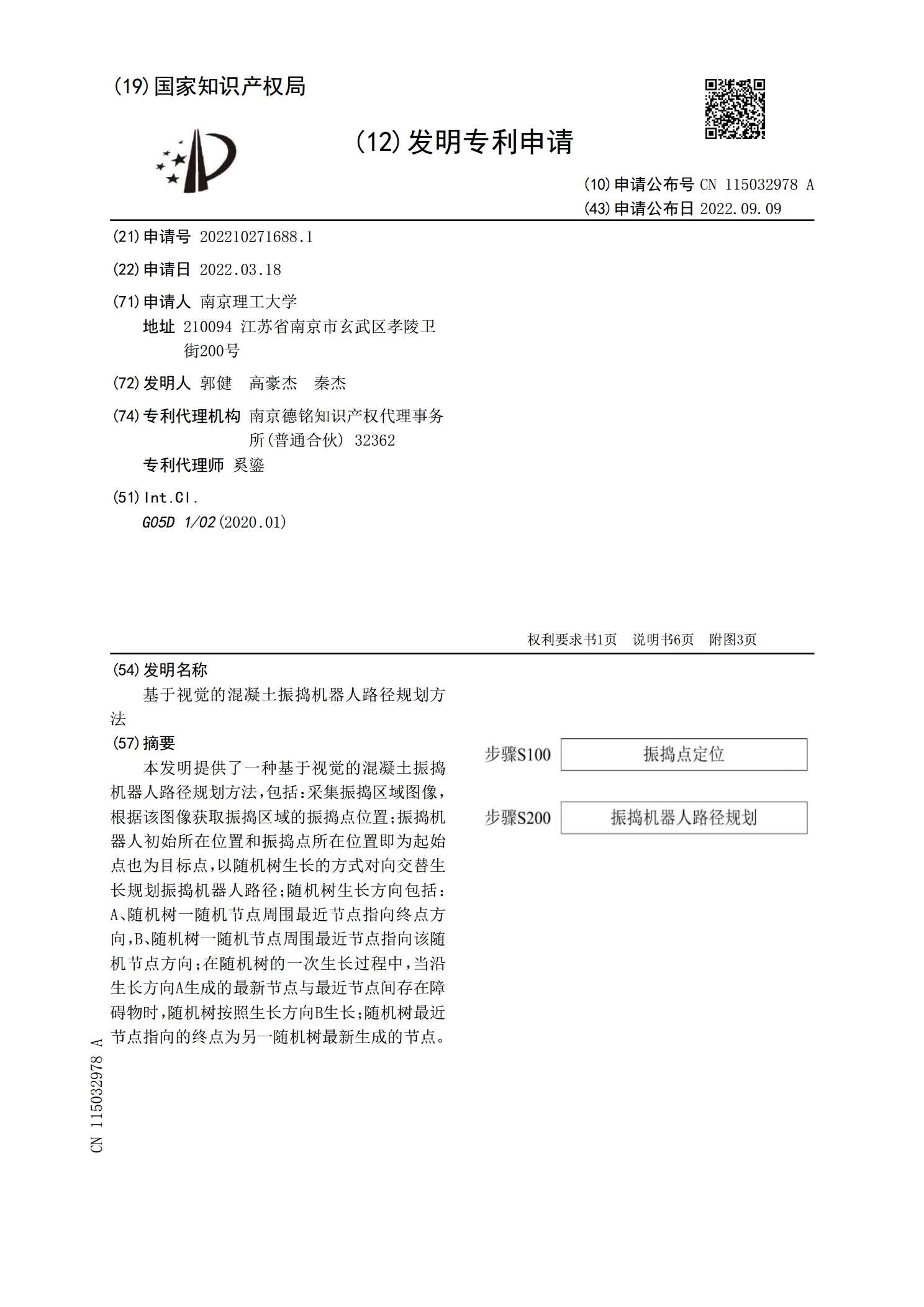
本发明提供了一种基于视觉的混凝土振捣机器人路径规划方法,包括:采集振捣区域图像,根据该图像获取振捣区域的振捣点位置;振捣机器人初始所在位置和振捣点所在位置即为起始点也为目标点,以随机树生长的方式对向交替生长规划振捣机器人路径;随机树生长方向包括:A、随机树一随机节点周围最近节点指向终点方向,B、随机树一随机节点周围最近节点指向该随机节点方向;在随机树的一次生长过程中,当沿生长方向A生成的最新节点与最近节点间存在障碍物时,随机树按照生长方向B生长;随机树最近节点指向的终点为另一随机树最新生成的节点。
基于视觉引导的地铁列检机器人路径规划系统及方法.pdf
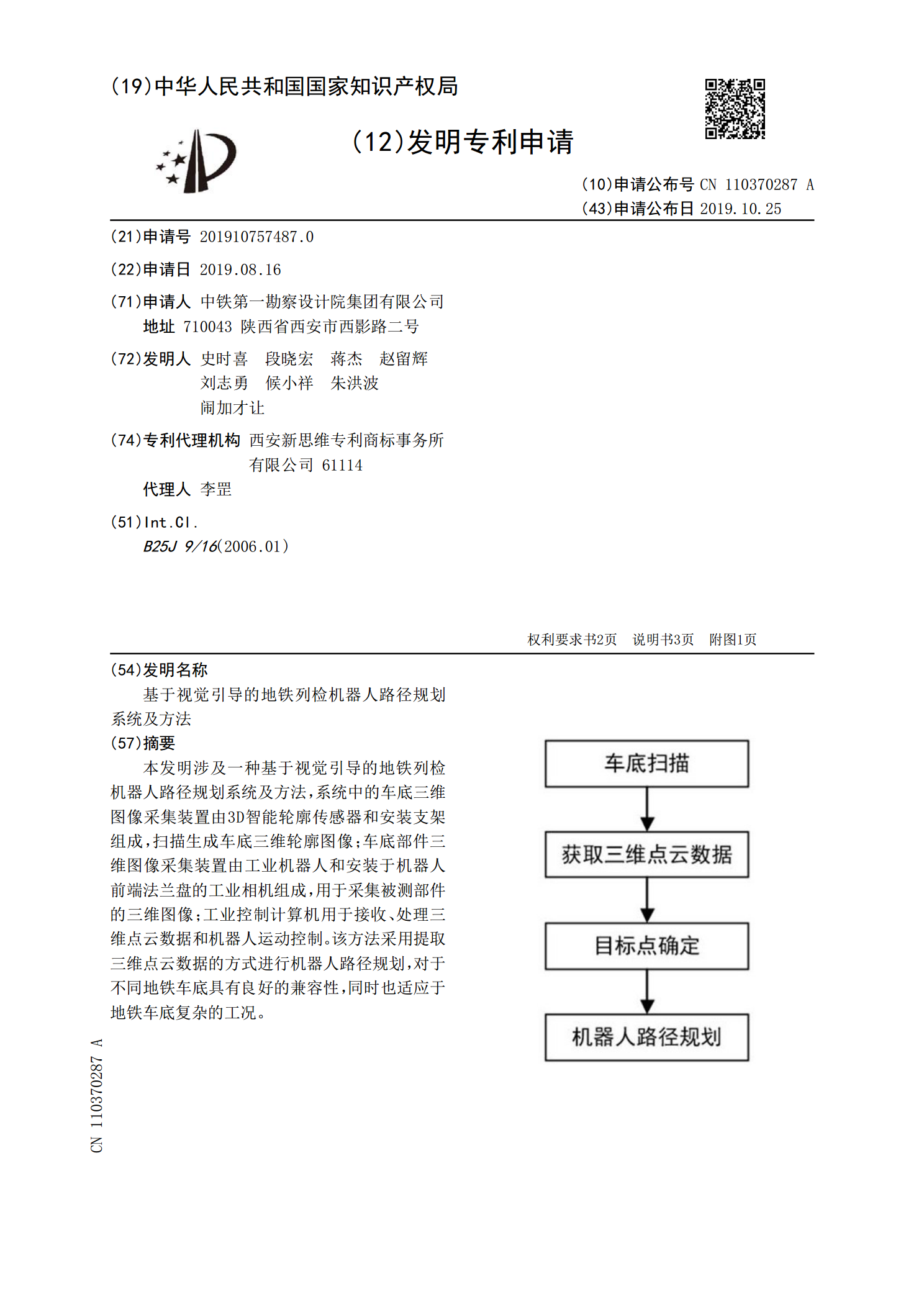
本发明涉及一种基于视觉引导的地铁列检机器人路径规划系统及方法,系统中的车底三维图像采集装置由3D智能轮廓传感器和安装支架组成,扫描生成车底三维轮廓图像;车底部件三维图像采集装置由工业机器人和安装于机器人前端法兰盘的工业相机组成,用于采集被测部件的三维图像;工业控制计算机用于接收、处理三维点云数据和机器人运动控制。该方法采用提取三维点云数据的方式进行机器人路径规划,对于不同地铁车底具有良好的兼容性,同时也适应于地铁车底复杂的工况。

基于视觉的平面关节机器人避障路径规划.docx
基于视觉的平面关节机器人避障路径规划基于视觉的平面关节机器人避障路径规划摘要随着机器人技术的不断发展,机器人的应用场景越来越广泛。其中,平面关节机器人在工业生产和服务领域得到了广泛应用。然而,平面关节机器人在环境感知和路径规划方面仍然面临挑战。本文提出了一种基于视觉的平面关节机器人避障路径规划算法,通过分析环境中的障碍物,实现机器人自主避障,以实现高效、安全、准确的移动。1.引言平面关节机器人由多个关节组成,可以在水平面内进行运动。它们广泛应用于装配、焊接、喷涂等工业生产和服务领域。然而,在复杂的环境中,

基于机器视觉的自主机器人路径规划研究.docx
基于机器视觉的自主机器人路径规划研究近年来,随着机器视觉技术的不断发展和应用范围的不断拓展,自主机器人逐渐成为一个热门的研究方向。其中,自主机器人路径规划是自主机器人领域的一个重要的研究方向,也是目前自主机器人领域的研究热点之一。本文将基于机器视觉的自主机器人路径规划进行探讨,阐述机器视觉技术在自主机器人路径规划中的应用和优势。一、路径规划的概述路径规划是指在给定的环境下,根据机器人的动力学特性和约束条件,通过算法确定一条从起点到终点的路径。本质上,路径规划是一种决策问题,需要在不断调整和优化中,找到最佳

基于视觉的毛坯件磨削路径规划方法.pptx
基于视觉的毛坯件磨削路径规划方法目录添加目录项标题基于视觉的毛坯件识别图像采集与处理毛坯件特征提取毛坯件分类与识别识别精度与可靠性磨削路径规划算法路径规划基本原理磨削路径生成算法路径优化算法算法性能评估与改进磨削参数优化磨削参数对加工质量的影响基于视觉的磨削参数优化方法实验验证与结果分析参数优化效果评估系统实现与应用案例基于视觉的毛坯件磨削路径规划系统架构系统实现技术路线应用案例分析实际应用效果评估技术挑战与展望基于视觉的毛坯件识别挑战与解决方案磨削路径规划算法的局限性及未来发展方向磨削参数优化技术的未来