
一种远程遥控式应急机器人.pdf

春岚****23

1/8

2/8
3/8
4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种远程遥控式应急机器人.pdf
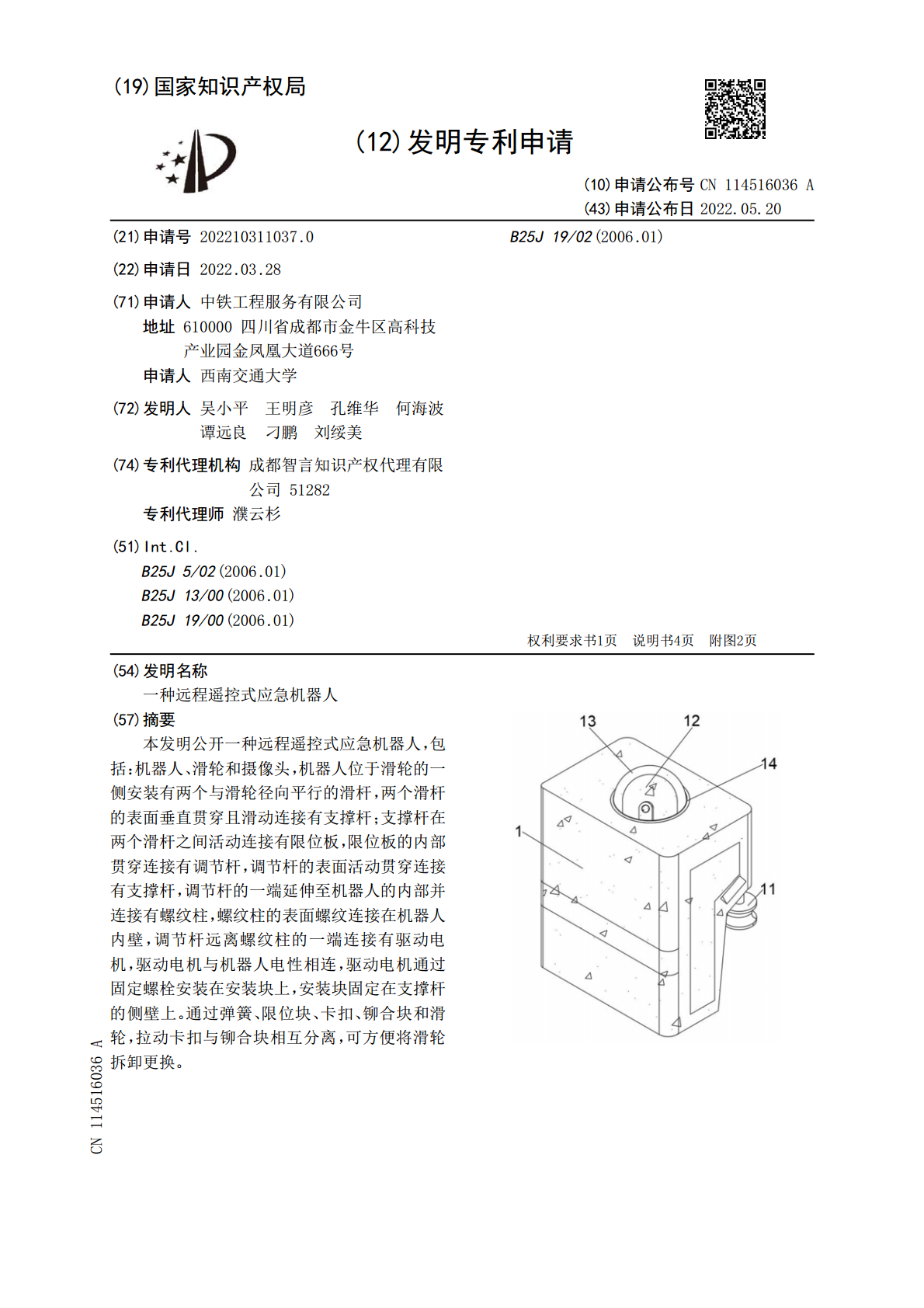
本发明公开一种远程遥控式应急机器人,包括:机器人、滑轮和摄像头,机器人位于滑轮的一侧安装有两个与滑轮径向平行的滑杆,两个滑杆的表面垂直贯穿且滑动连接有支撑杆;支撑杆在两个滑杆之间活动连接有限位板,限位板的内部贯穿连接有调节杆,调节杆的表面活动贯穿连接有支撑杆,调节杆的一端延伸至机器人的内部并连接有螺纹柱,螺纹柱的表面螺纹连接在机器人内壁,调节杆远离螺纹柱的一端连接有驱动电机,驱动电机与机器人电性相连,驱动电机通过固定螺栓安装在安装块上,安装块固定在支撑杆的侧壁上。通过弹簧、限位块、卡扣、铆合块和滑轮,拉动

远程遥控式救火机器人.pdf
本发明一种适用于远程遥控式救火机器人,包括:便捷式小型履带(1)、镁合金金属外壳(2)、热视镜头(3)、机械手臂(4)、喷水器(5)、灭火器(6)、物品储放柜(7)。履带(1)式行走方案,可以让机器人适合不同的地形,镁合金外壳(2)强度高、耐热性好,热视镜头(3)使机器人可以再黑暗中及烟雾中探测到是否有受困人员,机械手臂(4)可以对阻碍机器人的障碍物进行排除,喷水器(5)和灭火器(6)使机器人可以针对不同的火灾现场选择不同的灭火方案。本发明可以降低消防工作的危险性和困难程度,提高救援或者施工的效率。应用远

一种便携式远程终端遥控.pdf
本发明公开了一种便携式远程终端遥控,包括远程终端遥控箱体,所述远程终端遥控箱体包括上箱体和下箱体,所述上箱体滑动安装于下箱体内,所述下箱体底部固定安装有四组调节支腿,四组所述调节支腿一侧均固定安装有万向轮,所述上箱体和下箱体外部均通过螺杆分别固定安装有上箱门和下箱门,所述上箱门滑动安装于下箱门内,所述下箱体内部两侧对称安装有滑槽,所述行走装置顶部固定安装有隔板,所述连接块一侧固定安装有电动推杆,所述滑槽内位于下箱体顶部一侧固定连接有第一限位块,且滑槽内开设有导向槽,所述上箱体底部对称安装有第二限位块,两组
一种可远程遥控的探测救援机器人.pdf
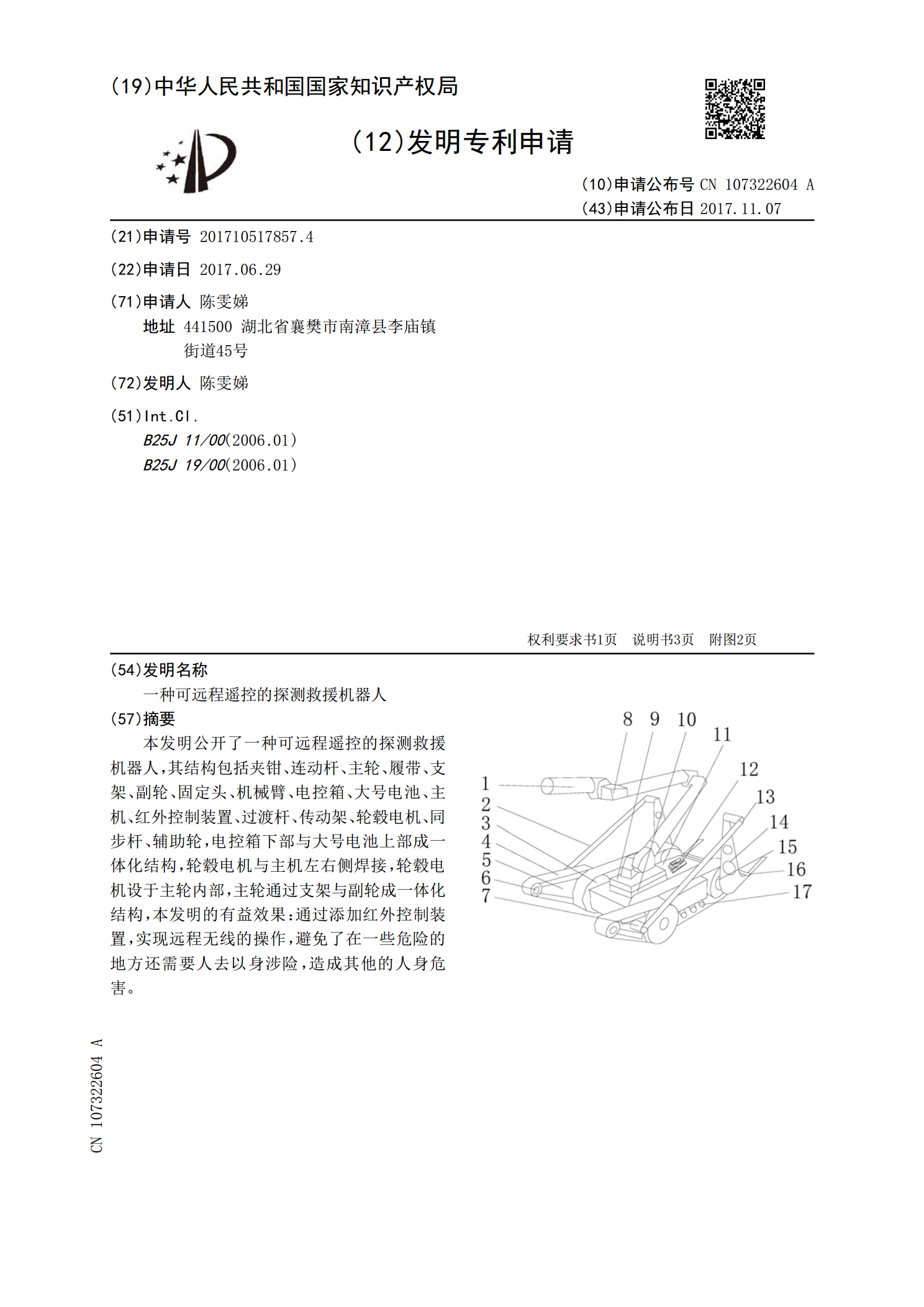
本发明公开了一种可远程遥控的探测救援机器人,其结构包括夹钳、连动杆、主轮、履带、支架、副轮、固定头、机械臂、电控箱、大号电池、主机、红外控制装置、过渡杆、传动架、轮毂电机、同步杆、辅助轮,电控箱下部与大号电池上部成一体化结构,轮毂电机与主机左右侧焊接,轮毂电机设于主轮内部,主轮通过支架与副轮成一体化结构,本发明的有益效果:通过添加红外控制装置,实现远程无线的操作,避免了在一些危险的地方还需要人去以身涉险,造成其他的人身危害。

一种遥控式拖地机器人.pdf
本发明公开了一种遥控式拖地机器人,包括机身、行走系统、拖地系统、洒水系统和遥控系统,其中:行走系统包括车轮、行走电机和传动链;拖地系统包括第一辊轴、第二辊轴、拖地电机、同步带和拖布,第一辊轴和第二辊轴水平地且互相平行地设于机身下部,拖地电机设于机身内并通过同步带与第二辊轴连接,拖布包绕在第一辊轴和第二辊轴上;洒水系统包括水箱、喷头、水管和电磁阀,水箱设于上部拖布与下部拖布之间,喷头设于下部拖布的上方并通过水管与水箱相连,电磁阀设于水管上;水箱内还设有过滤装置,水箱上方还设有两根水平的挤压辊轴;遥控系统包括