
远程遥控式救火机器人.pdf

音景****ka


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

远程遥控式救火机器人.pdf
本发明一种适用于远程遥控式救火机器人,包括:便捷式小型履带(1)、镁合金金属外壳(2)、热视镜头(3)、机械手臂(4)、喷水器(5)、灭火器(6)、物品储放柜(7)。履带(1)式行走方案,可以让机器人适合不同的地形,镁合金外壳(2)强度高、耐热性好,热视镜头(3)使机器人可以再黑暗中及烟雾中探测到是否有受困人员,机械手臂(4)可以对阻碍机器人的障碍物进行排除,喷水器(5)和灭火器(6)使机器人可以针对不同的火灾现场选择不同的灭火方案。本发明可以降低消防工作的危险性和困难程度,提高救援或者施工的效率。应用远

一种远程遥控式应急机器人.pdf
本发明公开一种远程遥控式应急机器人,包括:机器人、滑轮和摄像头,机器人位于滑轮的一侧安装有两个与滑轮径向平行的滑杆,两个滑杆的表面垂直贯穿且滑动连接有支撑杆;支撑杆在两个滑杆之间活动连接有限位板,限位板的内部贯穿连接有调节杆,调节杆的表面活动贯穿连接有支撑杆,调节杆的一端延伸至机器人的内部并连接有螺纹柱,螺纹柱的表面螺纹连接在机器人内壁,调节杆远离螺纹柱的一端连接有驱动电机,驱动电机与机器人电性相连,驱动电机通过固定螺栓安装在安装块上,安装块固定在支撑杆的侧壁上。通过弹簧、限位块、卡扣、铆合块和滑轮,拉动
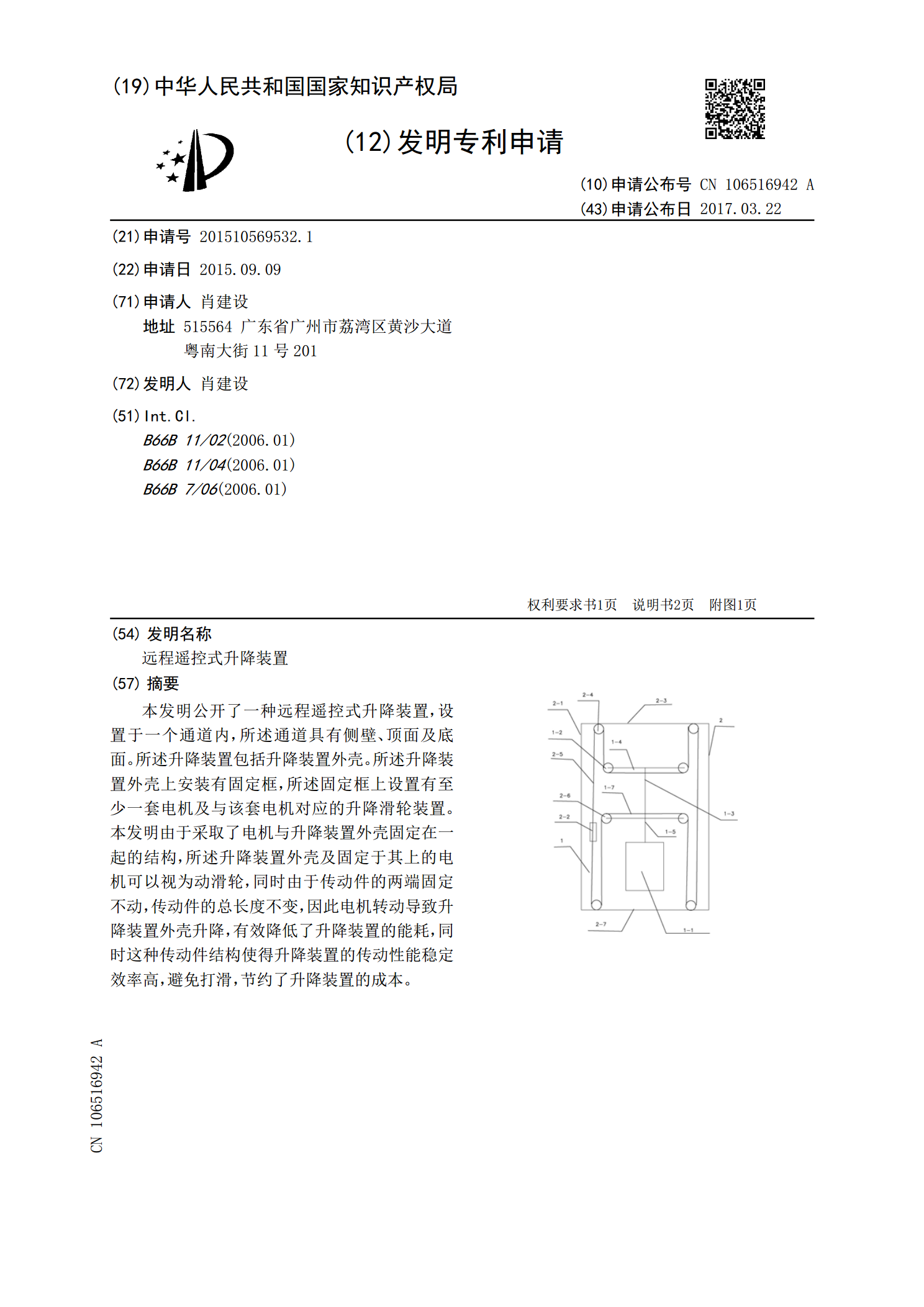
远程遥控式升降装置.pdf
本发明公开了一种远程遥控式升降装置,设置于一个通道内,所述通道具有侧壁、顶面及底面。所述升降装置包括升降装置外壳。所述升降装置外壳上安装有固定框,所述固定框上设置有至少一套电机及与该套电机对应的升降滑轮装置。本发明由于采取了电机与升降装置外壳固定在一起的结构,所述升降装置外壳及固定于其上的电机可以视为动滑轮,同时由于传动件的两端固定不动,传动件的总长度不变,因此电机转动导致升降装置外壳升降,有效降低了升降装置的能耗,同时这种传动件结构使得升降装置的传动性能稳定效率高,避免打滑,节约了升降装置的成本。

基于CAN总线的远程遥控式移动机器人系统设计.docx
基于CAN总线的远程遥控式移动机器人系统设计随着科技的不断发展,机器人已经成为现代工业生产、科学研究和生活服务的重要工具。移动机器人是机器人系统中的重要组成部分,它可以在特定的环境下执行任务,例如工厂生产车间、仓库、医院和城市环境。为了提高移动机器人的灵活性和效率,很多机器人系统设计者使用了CAN总线进行通信控制,从而使机器人系统更加高效和稳定。本文将从三个方面进行讨论:机器人运动控制系统设计、CAN总线通信设计和远程遥控控制系统设计。一、机器人运动控制系统设计。在机器人系统中,运动控制是至关重要的一部分
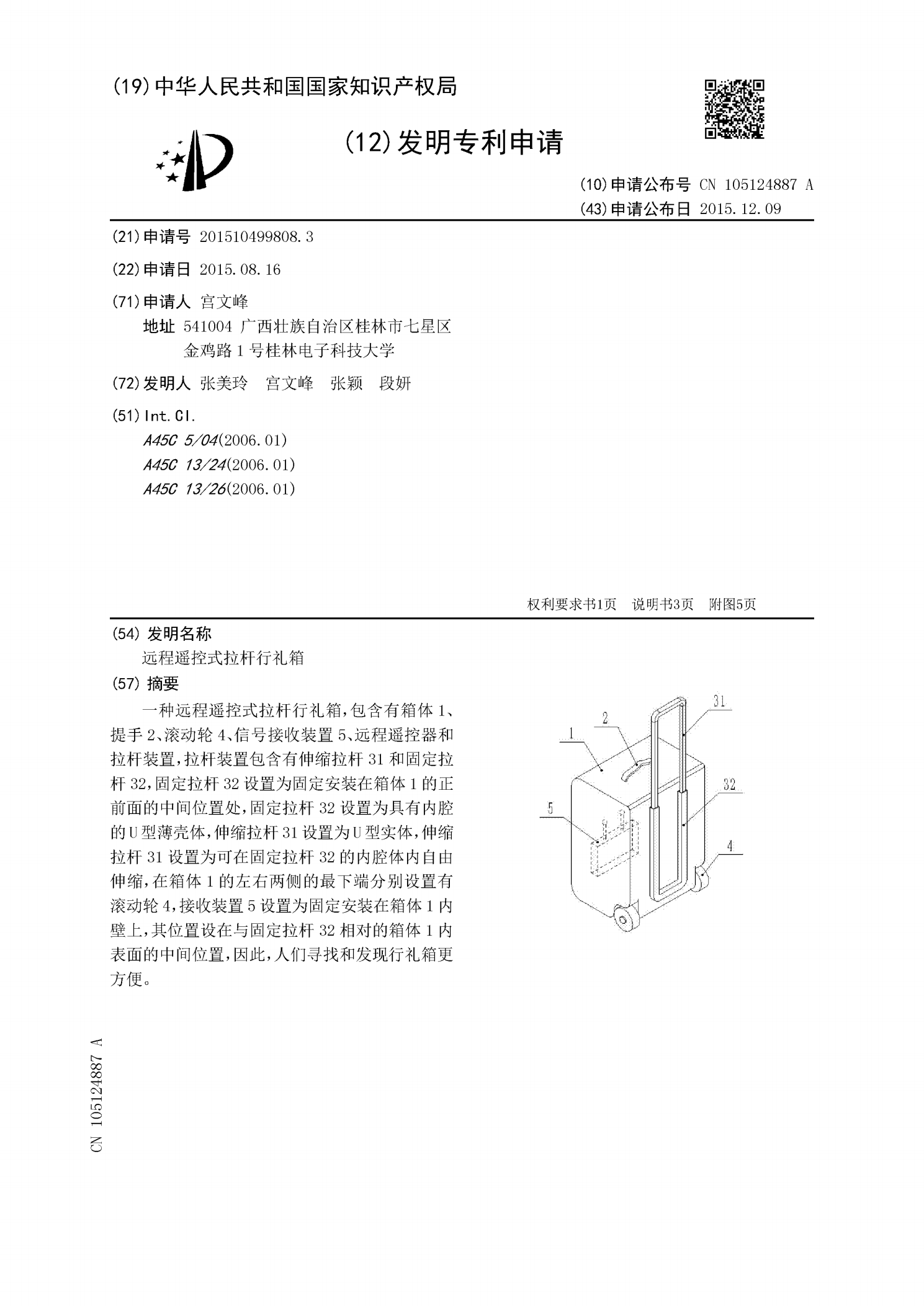
远程遥控式拉杆行礼箱.pdf
一种远程遥控式拉杆行礼箱,包含有箱体1、提手2、滚动轮4、信号接收装置5、远程遥控器和拉杆装置,拉杆装置包含有伸缩拉杆31和固定拉杆32,固定拉杆32设置为固定安装在箱体1的正前面的中间位置处,固定拉杆32设置为具有内腔的U型薄壳体,伸缩拉杆31设置为U型实体,伸缩拉杆31设置为可在固定拉杆32的内腔体内自由伸缩,在箱体1的左右两侧的最下端分别设置有滚动轮4,接收装置5设置为固定安装在箱体1内壁上,其位置设在与固定拉杆32相对的箱体1内表面的中间位置,因此,人们寻找和发现行礼箱更方便。