
一种单电机驱动割胶机器人.pdf

山柳****魔王


1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种单电机驱动割胶机器人.pdf
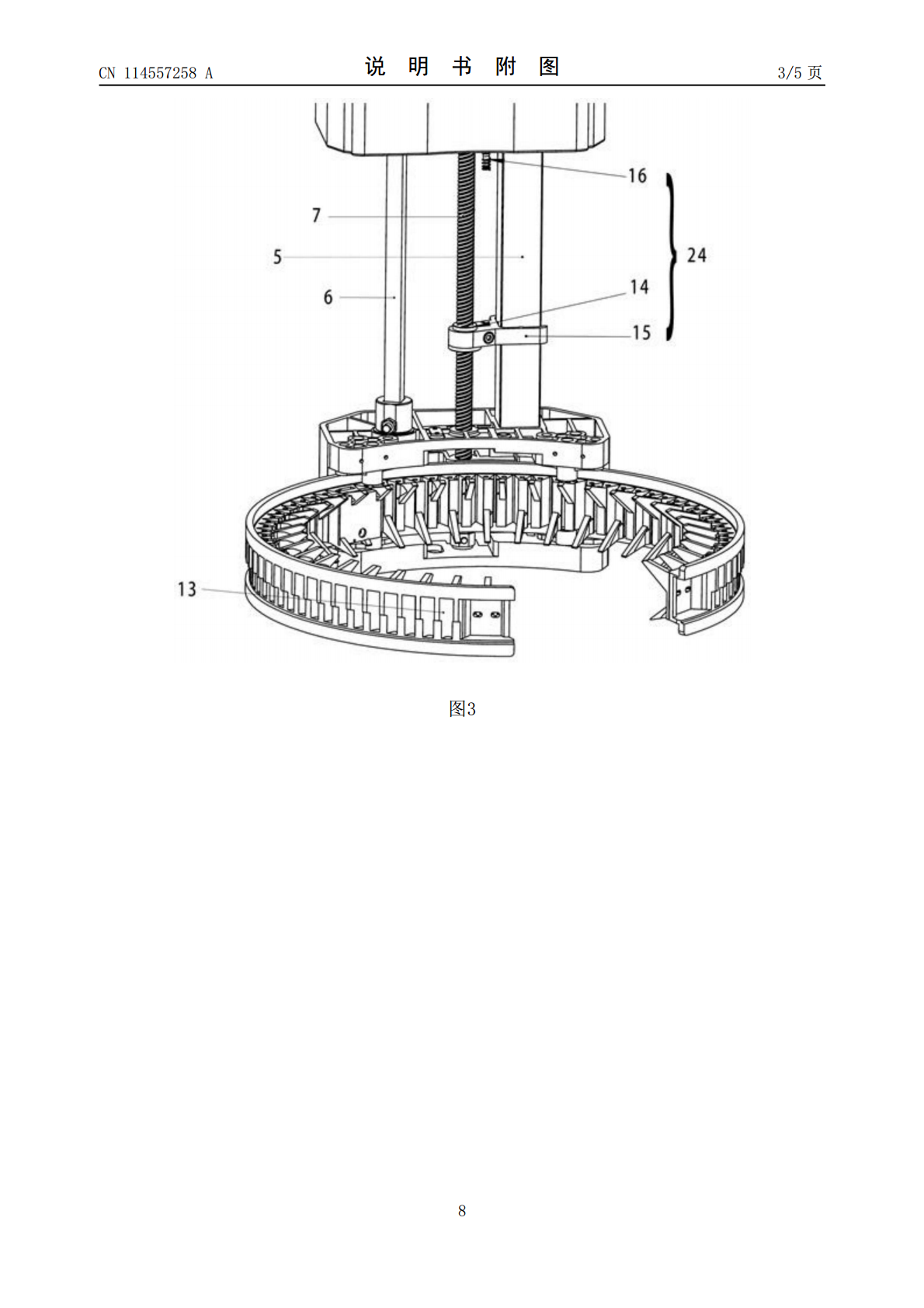
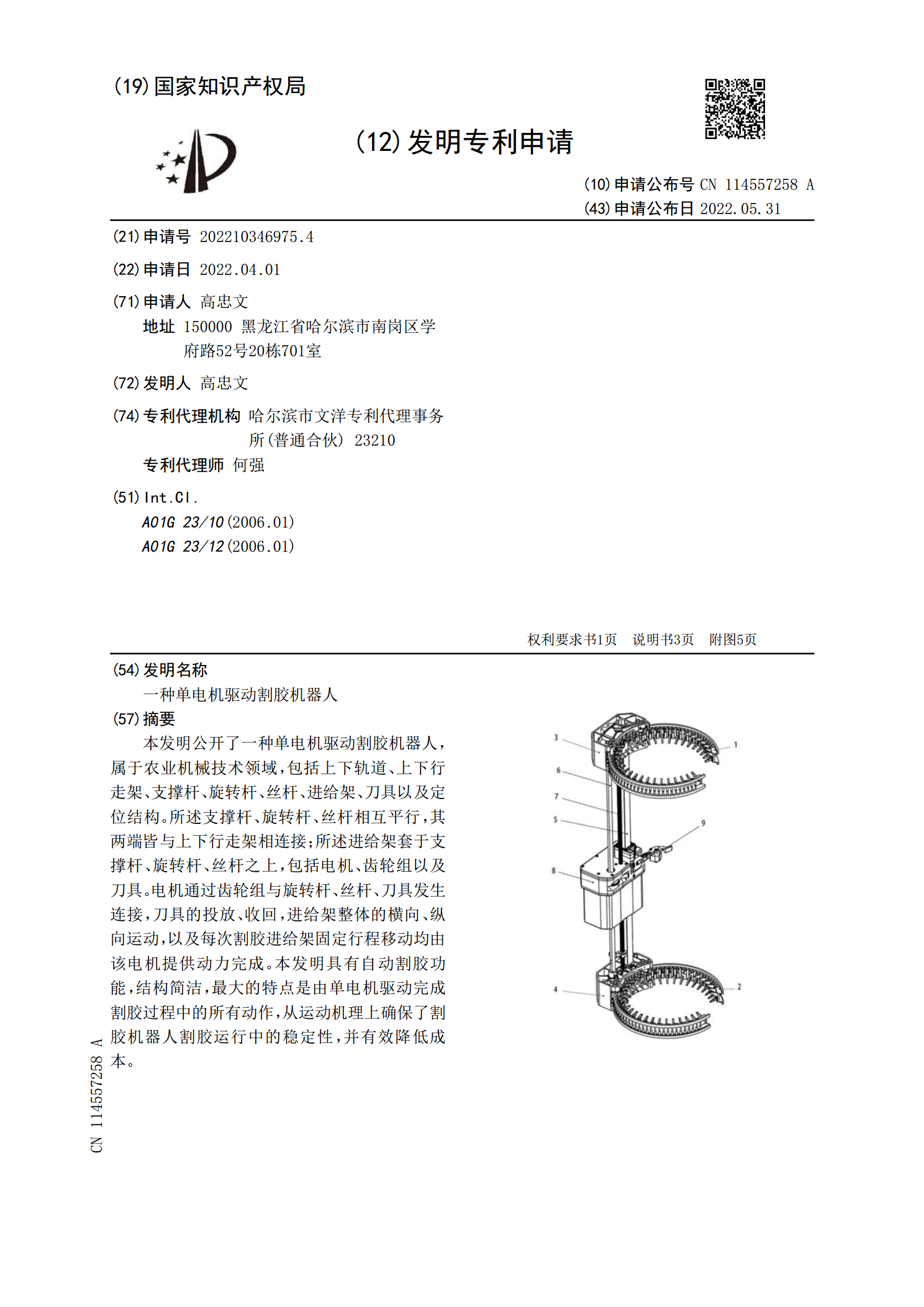
本发明公开了一种单电机驱动割胶机器人,属于农业机械技术领域,包括上下轨道、上下行走架、支撑杆、旋转杆、丝杆、进给架、刀具以及定位结构。所述支撑杆、旋转杆、丝杆相互平行,其两端皆与上下行走架相连接;所述进给架套于支撑杆、旋转杆、丝杆之上,包括电机、齿轮组以及刀具。电机通过齿轮组与旋转杆、丝杆、刀具发生连接,刀具的投放、收回,进给架整体的横向、纵向运动,以及每次割胶进给架固定行程移动均由该电机提供动力完成。本发明具有自动割胶功能,结构简洁,最大的特点是由单电机驱动完成割胶过程中的所有动作,从运动机理上确保了割

一种单电机驱动的绳驱式欠驱动攀爬机器人.pdf
本发明涉及爬行机器人技术领域,具体地说是一种单电机驱动的绳驱式欠驱动攀爬机器人,其中前轮组件设于底盘前端,底盘后端设有辅助轮,侧肢节分设于底盘两侧,单电机驱动机构设于底盘上,且单电机驱动机构设有输出轴,所述输出轴前端通过前轮离合器与蜗杆相连,在前轮组件上设有蜗轮,且蜗杆与所述蜗轮啮合,输出轴后端通过抱持离合器与侧肢节驱动轴相连,侧肢节分别通过钢丝驱动,且所述钢丝缠绕于侧肢节驱动轴上,前轮离合器内设有前轮离合弹簧连接输出轴和蜗杆,抱持离合器内设有抱持离合弹簧连接输出轴和侧肢节驱动轴,所述前轮离合弹簧和抱持离

一种单电机驱动的机器人行走机构.pdf
本发明设计一种单电机驱动的机器人行走机构,包括外壳、设置在所述外壳内的蜗轮蜗杆驱动机构、与所述蜗轮蜗杆驱动机构的输出端相连接的曲柄连杆机构、设置在所述曲柄连杆机构末端的弹性足底,所述的蜗轮蜗杆驱动机构包括电机、输出轴、相啮合的蜗杆、蜗轮、所述的电机通过联轴器与蜗杆驱动连接,所述的输出轴与蜗轮同轴连接;所述曲柄连杆机构包括曲柄、连杆、连架杆、机身连接杆,所述的曲柄的一端连接输出轴,另一端与连杆上端转动铰接,所述的连架杆一端与机身连接杆转动铰接,另一端与连杆中部转动铰接,所述机身连接杆的另一端用于连接机身。本

一种单电机驱动可爬行的弹跳机器人.pdf
一种单电机驱动可爬行的弹跳机器人,由机架、电源模块、传感装置、控制装置、驱动机构、弹跳机构和爬行机构组成,机架用于安装其它机构和装置;电源装置为驱动机构和控制装置提供能量;传感装置用于感知机器人的姿态、前方是否有障碍物以及驱动杆转动的角度位置;控制装置完成机器人的控制、数据远程传输、传感器数据采集保存;驱动机构使用一个电机的正反转驱动机器人完成爬行和弹跳运动;弹跳机构设计了一种具有急回特性的圆柱凸轮能够实现弹跳运动能量的慢速储能和快速释放,从而实现弹跳运动;爬行机构设计了一种圆盘凸轮配合十字交叉的两个驱动
一种凸轮驱动针刺割胶机.pdf
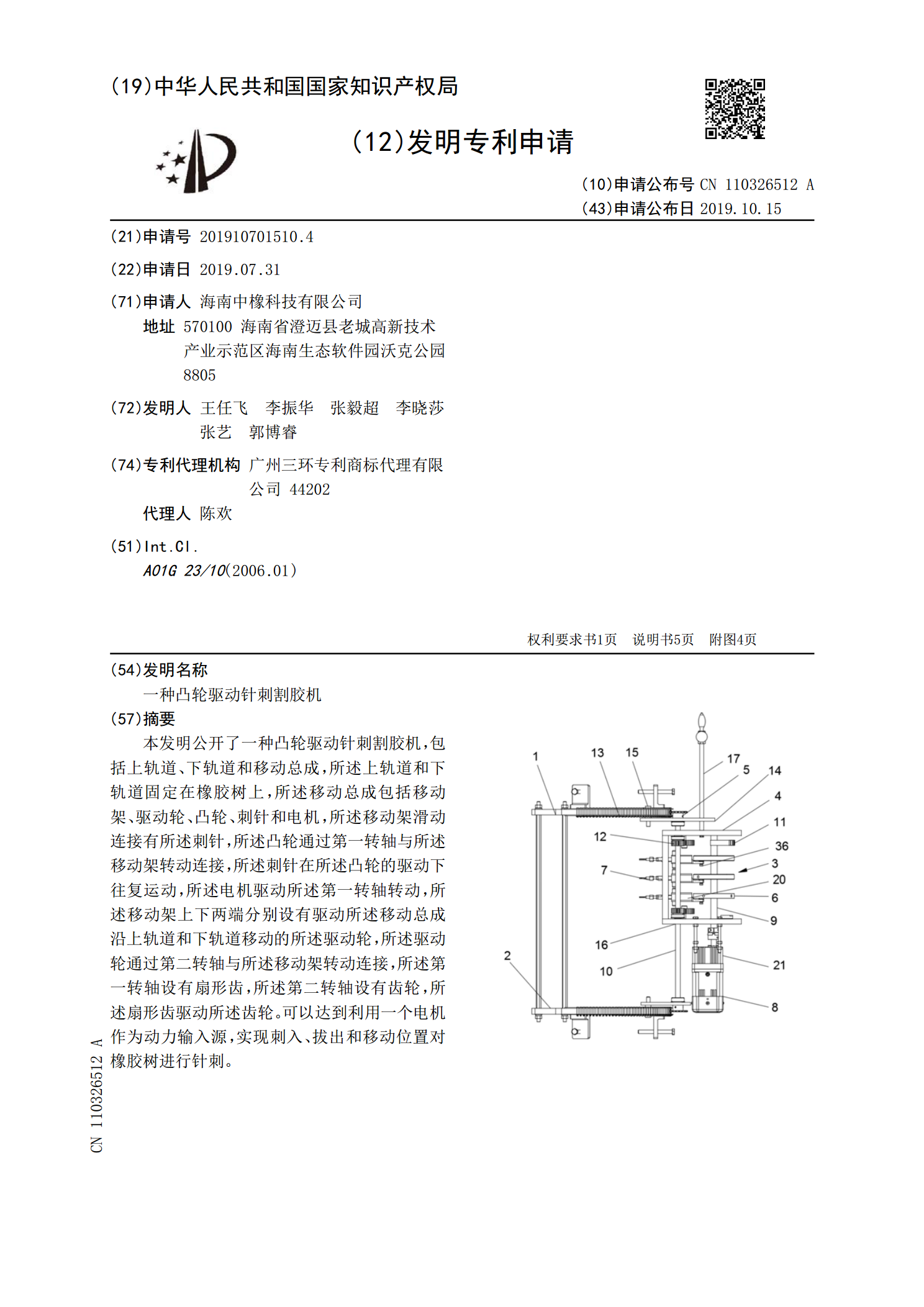
本发明公开了一种凸轮驱动针刺割胶机,包括上轨道、下轨道和移动总成,所述上轨道和下轨道固定在橡胶树上,所述移动总成包括移动架、驱动轮、凸轮、刺针和电机,所述移动架滑动连接有所述刺针,所述凸轮通过第一转轴与所述移动架转动连接,所述刺针在所述凸轮的驱动下往复运动,所述电机驱动所述第一转轴转动,所述移动架上下两端分别设有驱动所述移动总成沿上轨道和下轨道移动的所述驱动轮,所述驱动轮通过第二转轴与所述移动架转动连接,所述第一转轴设有扇形齿,所述第二转轴设有齿轮,所述扇形齿驱动所述齿轮。可以达到利用一个电机作为动力输入