
一种可产生大角度偏转的飞行体偏转头控制方法及系统.pdf

是你****盟主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可产生大角度偏转的飞行体偏转头控制方法及系统.pdf
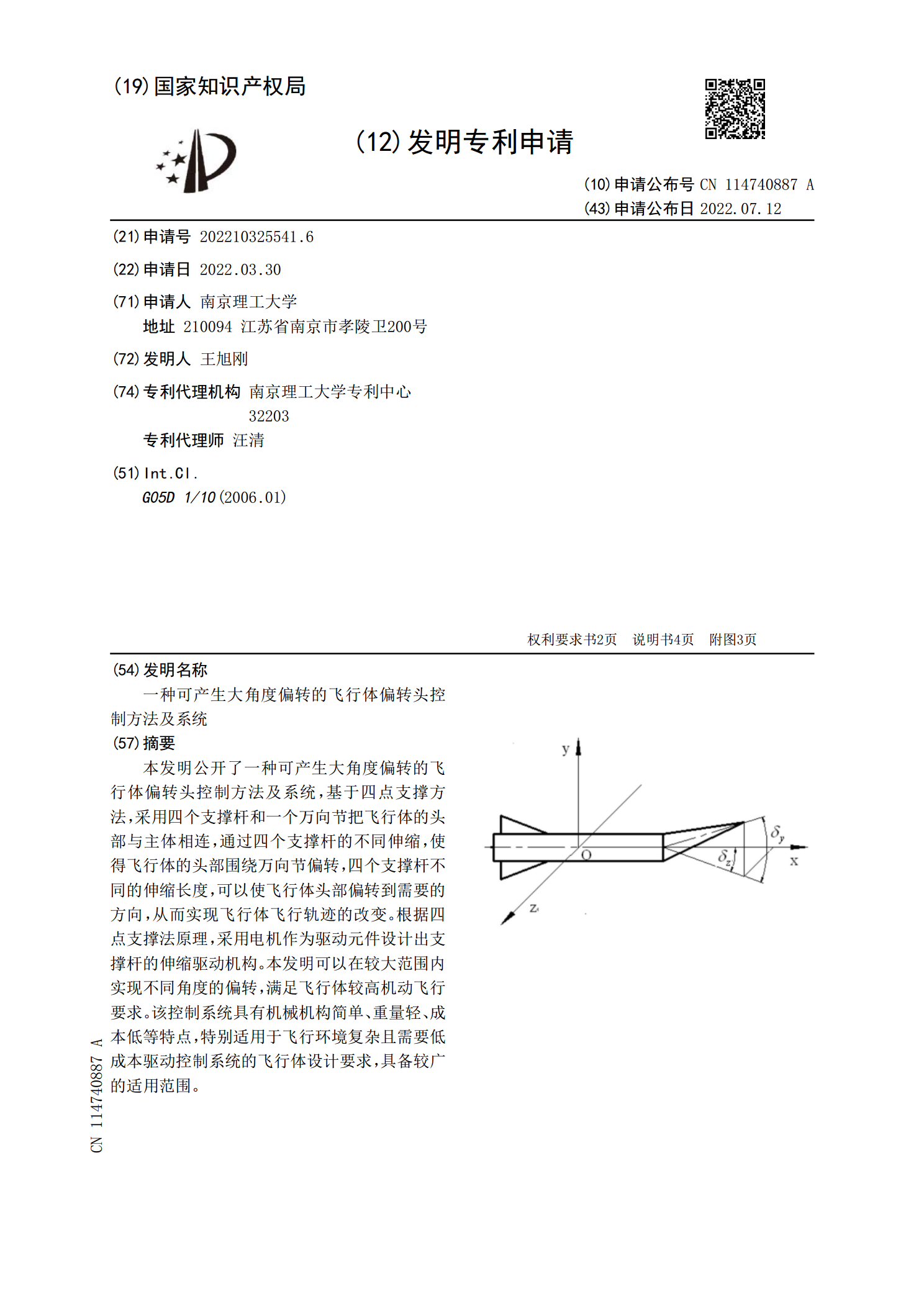
本发明公开了一种可产生大角度偏转的飞行体偏转头控制方法及系统,基于四点支撑方法,采用四个支撑杆和一个万向节把飞行体的头部与主体相连,通过四个支撑杆的不同伸缩,使得飞行体的头部围绕万向节偏转,四个支撑杆不同的伸缩长度,可以使飞行体头部偏转到需要的方向,从而实现飞行体飞行轨迹的改变。根据四点支撑法原理,采用电机作为驱动元件设计出支撑杆的伸缩驱动机构。本发明可以在较大范围内实现不同角度的偏转,满足飞行体较高机动飞行要求。该控制系统具有机械机构简单、重量轻、成本低等特点,特别适用于飞行环境复杂且需要低成本驱动控制

一种偏转头转运架.pdf
本实用新型提出一种偏转头转运架,包括:相对设置的两方形框架、连接两所述方形框架的连接梁、设置在所述方形框架上下间隔设置的承接层、间隔设置在所述承接层上的多个限位组件、设置在所述限位组件上的支撑轴以及设置在所述方形框架下方的承接槽;相邻限位组件的间距大于所述偏转头的宽度,所述限位组件用于支撑轴的限位,所述承接槽用于叉车的叉取,所述支撑轴用于穿过偏转头的通孔,所述限位组件包括设置在顶层的第一限位组件和设置在中间层的第二限位组件。本实用新型实现偏转头的成批转运,可以采用叉车叉取,提高生产效率。

无人飞行体、飞行体控制系统及搬运方法.pdf
本发明的目的在于提供一种能够防止搬运物意外掉落的无人飞行体。本发明的一实施方式的无人飞行体(1)具备:能够飞行的飞行主体(2);卷扬机(3),设置在所述飞行主体(2)上,能够将可于前端连接搬运物(T)的线状部件(31)卷出及卷取;以及防掉落机构(4),设置在所述飞行主体(2)上,能够保持已解除与所述线状部件的连接的所述搬运物(T)。

一种飞机前轮偏转角度控制系统.pdf
本申请涉及一种飞机前轮偏转角度控制系统,包括:伺服阀;驱动装置,与伺服阀连接,以能够将伺服阀输出的流量转换为扭转力矩,带动与其相连的飞机前轮转动;位置传感器,用以采集飞机前轮的位置信息,输出飞机前轮偏转角度信号;可调节偏置单元,为飞机前轮偏转角度信号附加飞机前轮角度偏置信号,形成飞机前轮偏转角度反馈信号;其中,飞机前轮角度偏置信号能够抵消飞机前起落架处于机械中位时的飞机前轮偏转角度信号;控制单元,用以接收飞机前轮偏转角度控制信号、飞机前轮偏转角度反馈信号,比较得到飞机前轮偏转角度反馈信号与飞机前轮偏转角度
一种检测车辆偏转角度的方法.pdf
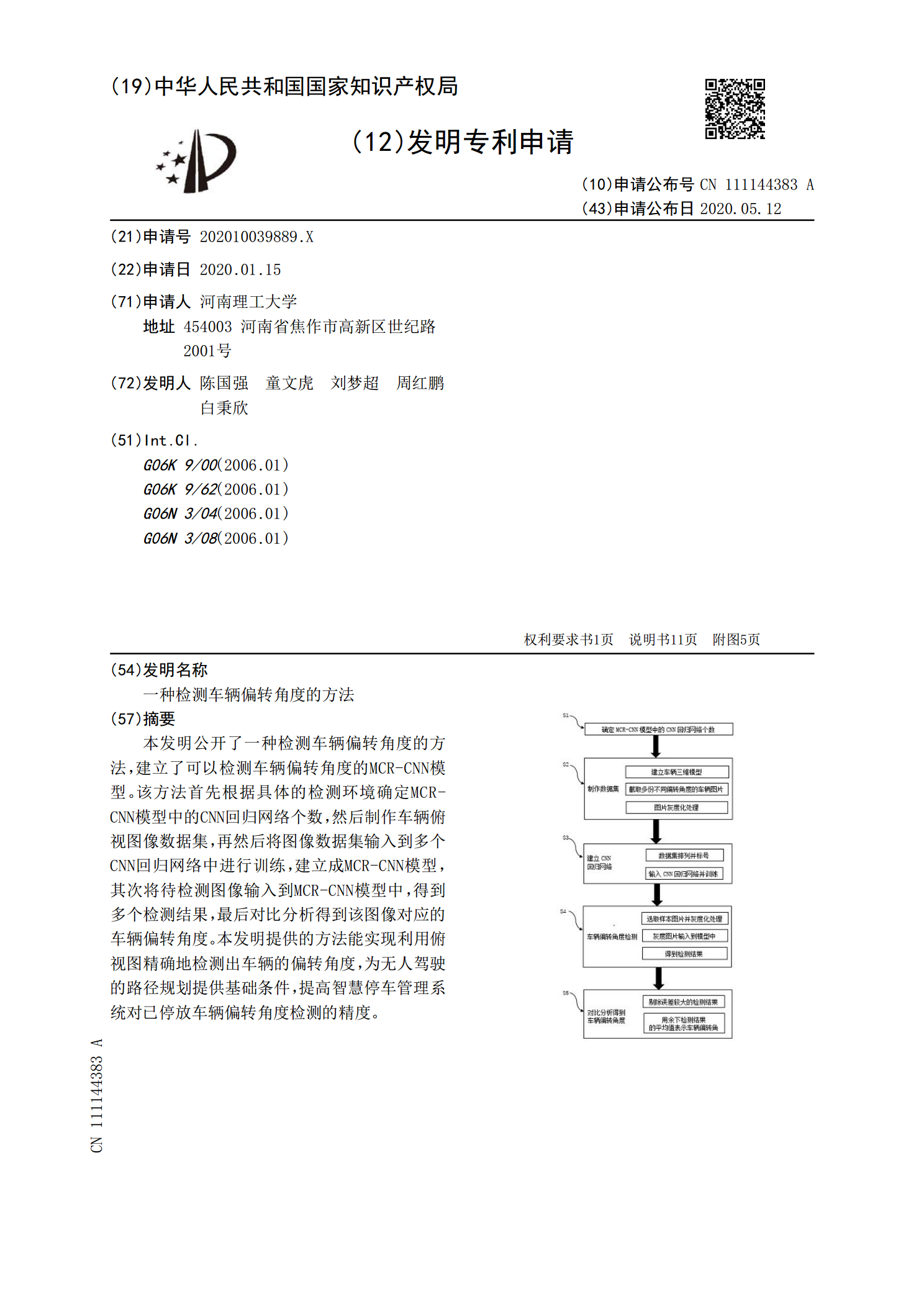
本发明公开了一种检测车辆偏转角度的方法,建立了可以检测车辆偏转角度的MCR?CNN模型。该方法首先根据具体的检测环境确定MCR?CNN模型中的CNN回归网络个数,然后制作车辆俯视图像数据集,再然后将图像数据集输入到多个CNN回归网络中进行训练,建立成MCR?CNN模型,其次将待检测图像输入到MCR?CNN模型中,得到多个检测结果,最后对比分析得到该图像对应的车辆偏转角度。本发明提供的方法能实现利用俯视图精确地检测出车辆的偏转角度,为无人驾驶的路径规划提供基础条件,提高智慧停车管理系统对已停放车辆偏转角度检