
一种腰部助力外骨骼机器人.pdf

猫巷****提格


1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种腰部助力外骨骼机器人.pdf
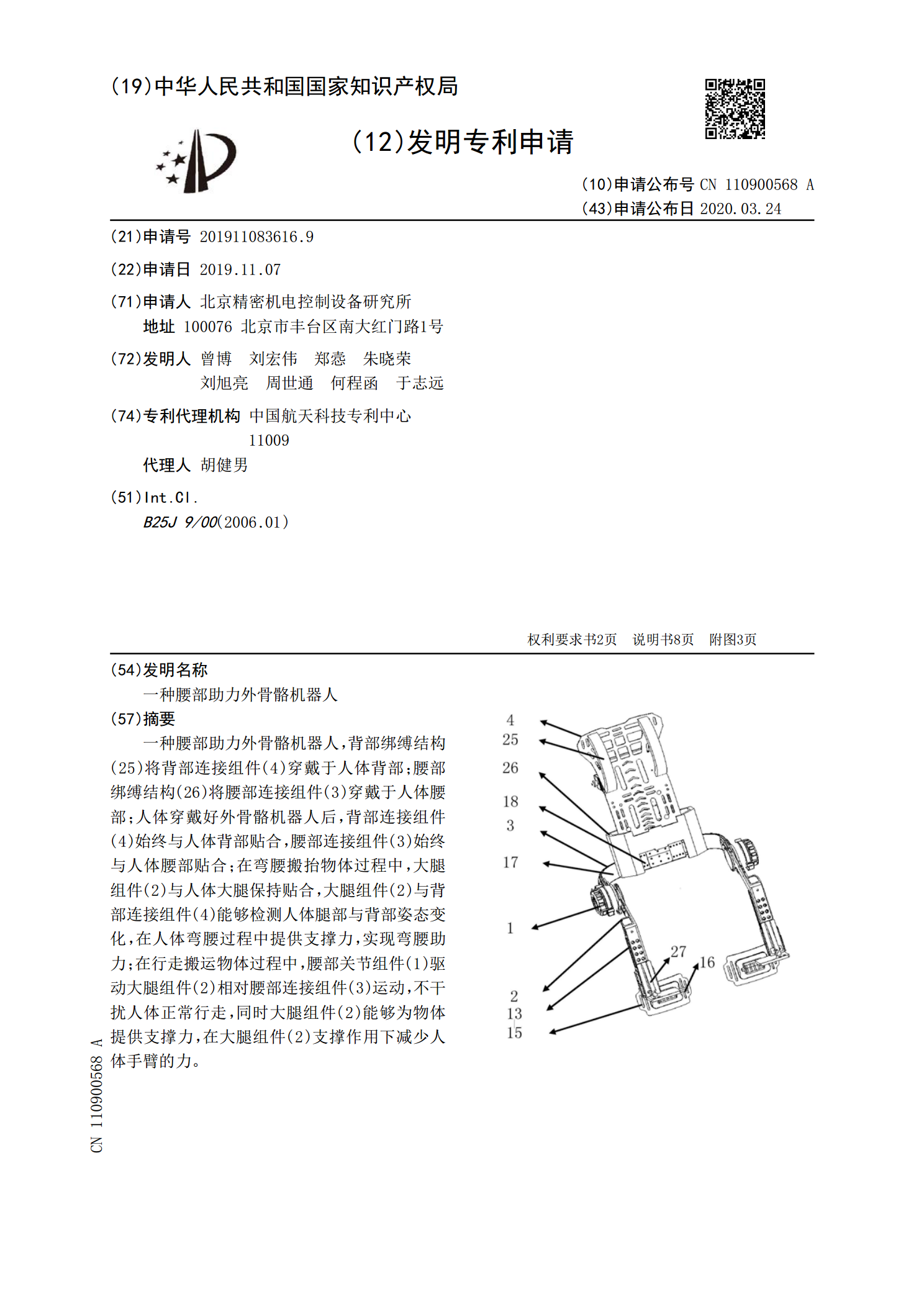
一种腰部助力外骨骼机器人,背部绑缚结构(25)将背部连接组件(4)穿戴于人体背部;腰部绑缚结构(26)将腰部连接组件(3)穿戴于人体腰部;人体穿戴好外骨骼机器人后,背部连接组件(4)始终与人体背部贴合,腰部连接组件(3)始终与人体腰部贴合;在弯腰搬抬物体过程中,大腿组件(2)与人体大腿保持贴合,大腿组件(2)与背部连接组件(4)能够检测人体腿部与背部姿态变化,在人体弯腰过程中提供支撑力,实现弯腰助力;在行走搬运物体过程中,腰部关节组件(1)驱动大腿组件(2)相对腰部连接组件(3)运动,不干扰人体正常行走,
一种腰部外骨骼助力装置.pdf
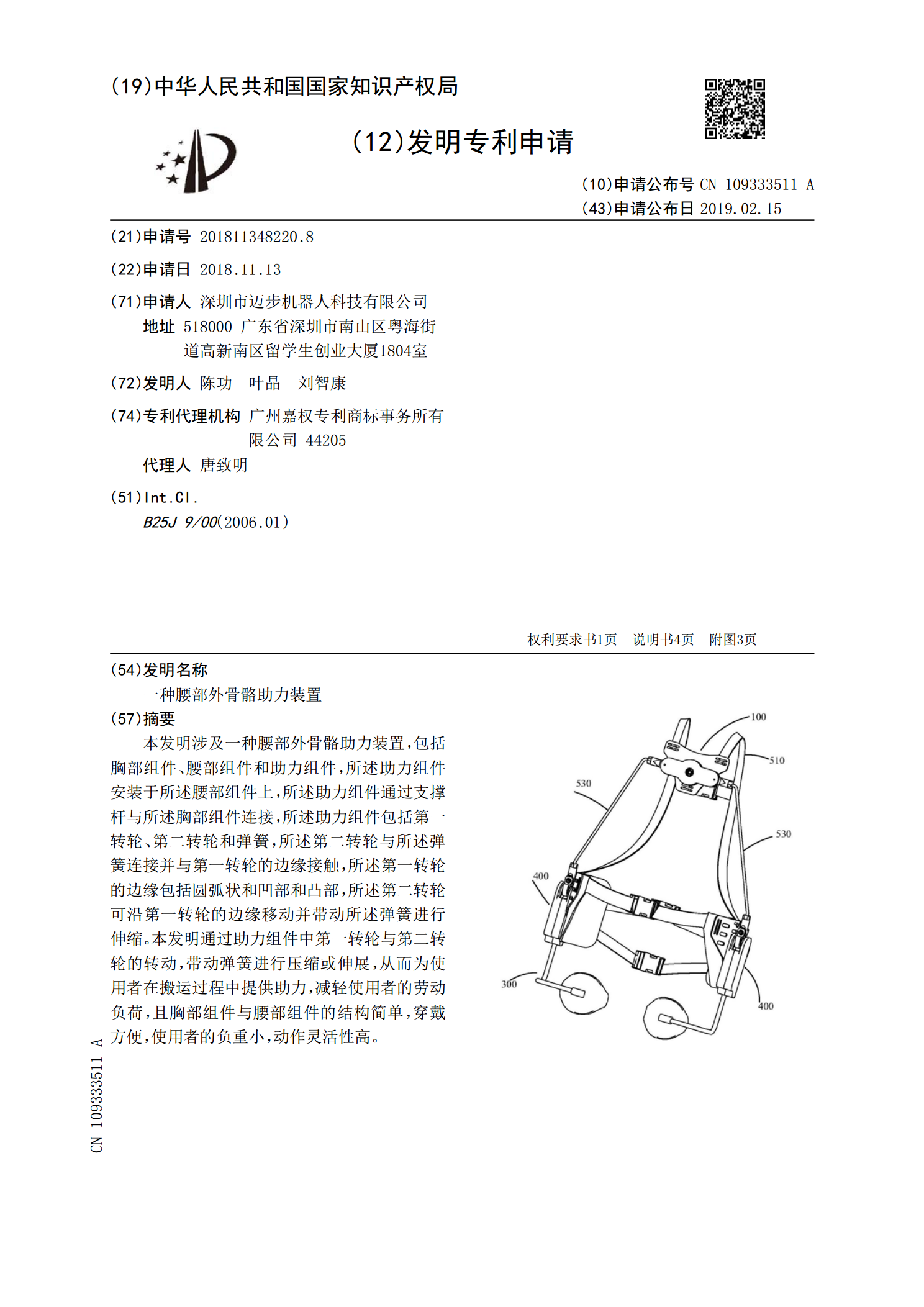
本发明涉及一种腰部外骨骼助力装置,包括胸部组件、腰部组件和助力组件,所述助力组件安装于所述腰部组件上,所述助力组件通过支撑杆与所述胸部组件连接,所述助力组件包括第一转轮、第二转轮和弹簧,所述第二转轮与所述弹簧连接并与第一转轮的边缘接触,所述第一转轮的边缘包括圆弧状和凹部和凸部,所述第二转轮可沿第一转轮的边缘移动并带动所述弹簧进行伸缩。本发明通过助力组件中第一转轮与第二转轮的转动,带动弹簧进行压缩或伸展,从而为使用者在搬运过程中提供助力,减轻使用者的劳动负荷,且胸部组件与腰部组件的结构简单,穿戴方便,使用者
一种腰部外骨骼机器人系统及其助力控制方法.pdf
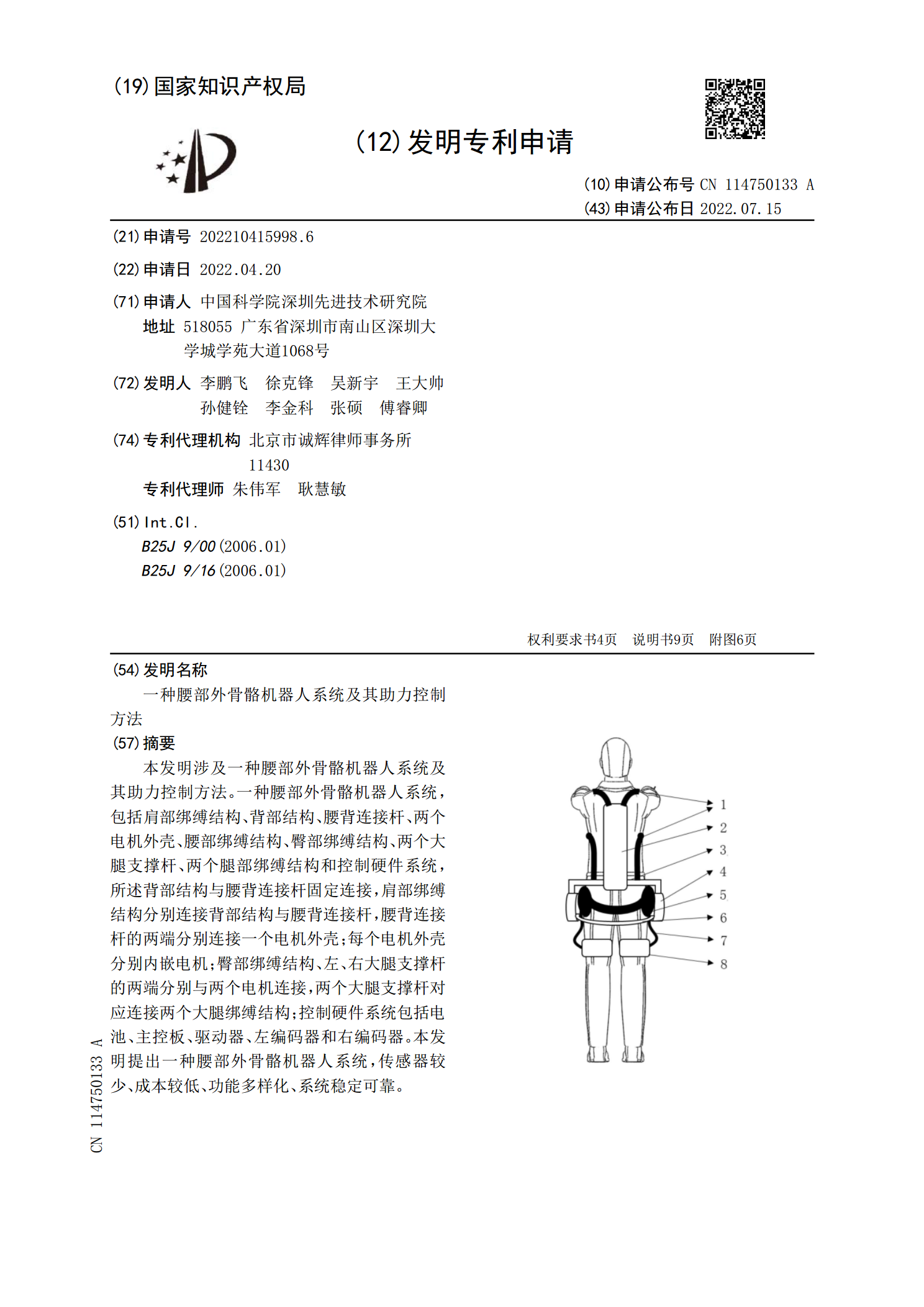
本发明涉及一种腰部外骨骼机器人系统及其助力控制方法。一种腰部外骨骼机器人系统,包括肩部绑缚结构、背部结构、腰背连接杆、两个电机外壳、腰部绑缚结构、臀部绑缚结构、两个大腿支撑杆、两个腿部绑缚结构和控制硬件系统,所述背部结构与腰背连接杆固定连接,肩部绑缚结构分别连接背部结构与腰背连接杆,腰背连接杆的两端分别连接一个电机外壳;每个电机外壳分别内嵌电机;臀部绑缚结构、左、右大腿支撑杆的两端分别与两个电机连接,两个大腿支撑杆对应连接两个大腿绑缚结构;控制硬件系统包括电池、主控板、驱动器、左编码器和右编码器。本发明提
一种主动式腰部助力外骨骼.pdf
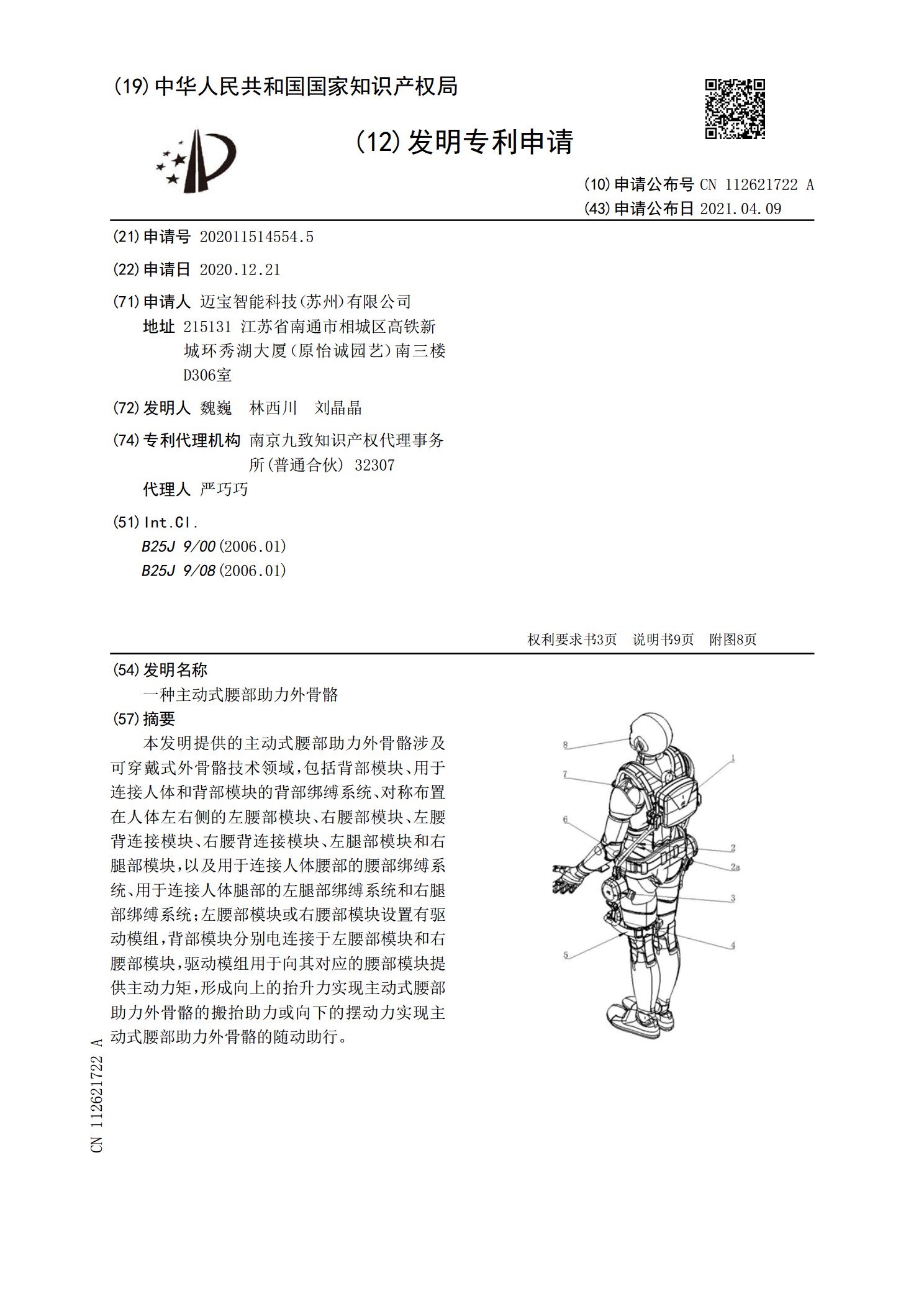
本发明提供的主动式腰部助力外骨骼涉及可穿戴式外骨骼技术领域,包括背部模块、用于连接人体和背部模块的背部绑缚系统、对称布置在人体左右侧的左腰部模块、右腰部模块、左腰背连接模块、右腰背连接模块、左腿部模块和右腿部模块,以及用于连接人体腰部的腰部绑缚系统、用于连接人体腿部的左腿部绑缚系统和右腿部绑缚系统;左腰部模块或右腰部模块设置有驱动模组,背部模块分别电连接于左腰部模块和右腰部模块,驱动模组用于向其对应的腰部模块提供主动力矩,形成向上的抬升力实现主动式腰部助力外骨骼的搬抬助力或向下的摆动力实现主动式腰部助力外
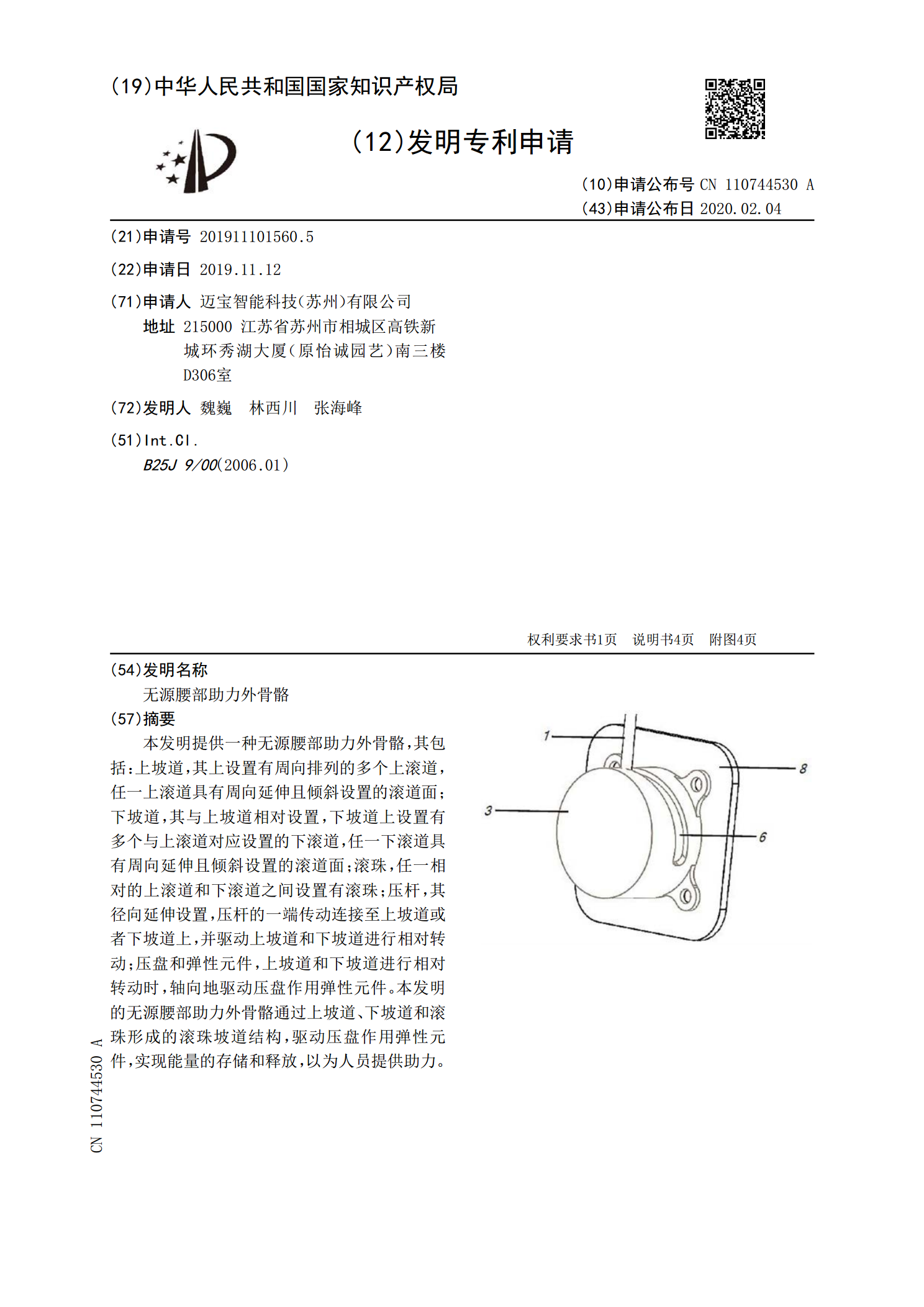
无源腰部助力外骨骼.pdf
本发明提供一种无源腰部助力外骨骼,其包括:上坡道,其上设置有周向排列的多个上滚道,任一上滚道具有周向延伸且倾斜设置的滚道面;下坡道,其与上坡道相对设置,下坡道上设置有多个与上滚道对应设置的下滚道,任一下滚道具有周向延伸且倾斜设置的滚道面;滚珠,任一相对的上滚道和下滚道之间设置有滚珠;压杆,其径向延伸设置,压杆的一端传动连接至上坡道或者下坡道上,并驱动上坡道和下坡道进行相对转动;压盘和弹性元件,上坡道和下坡道进行相对转动时,轴向地驱动压盘作用弹性元件。本发明的无源腰部助力外骨骼通过上坡道、下坡道和滚珠形成的