
机械臂组件.pdf

甲申****66

1/8
2/8

3/8
4/8

5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
机械臂组件.pdf
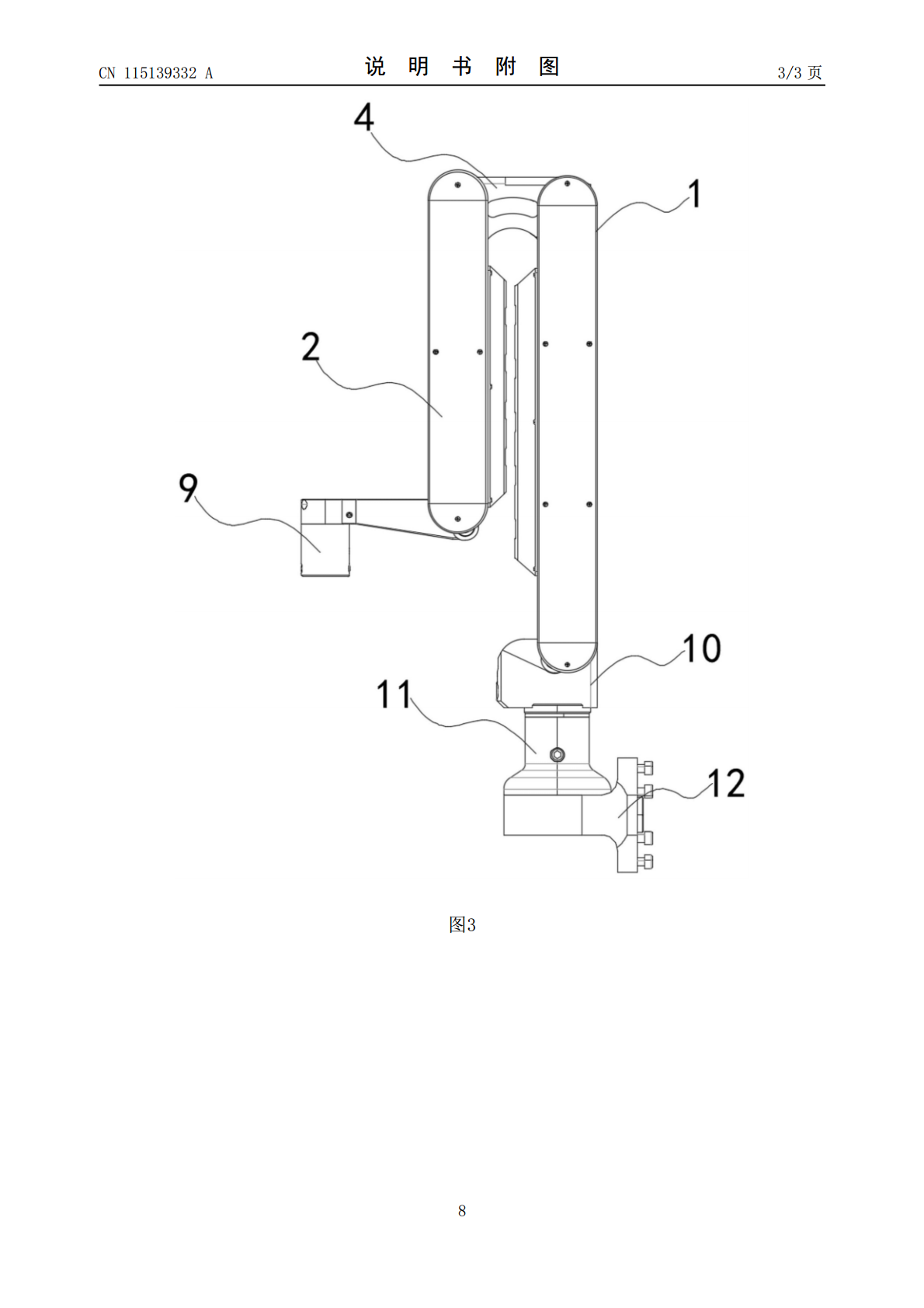
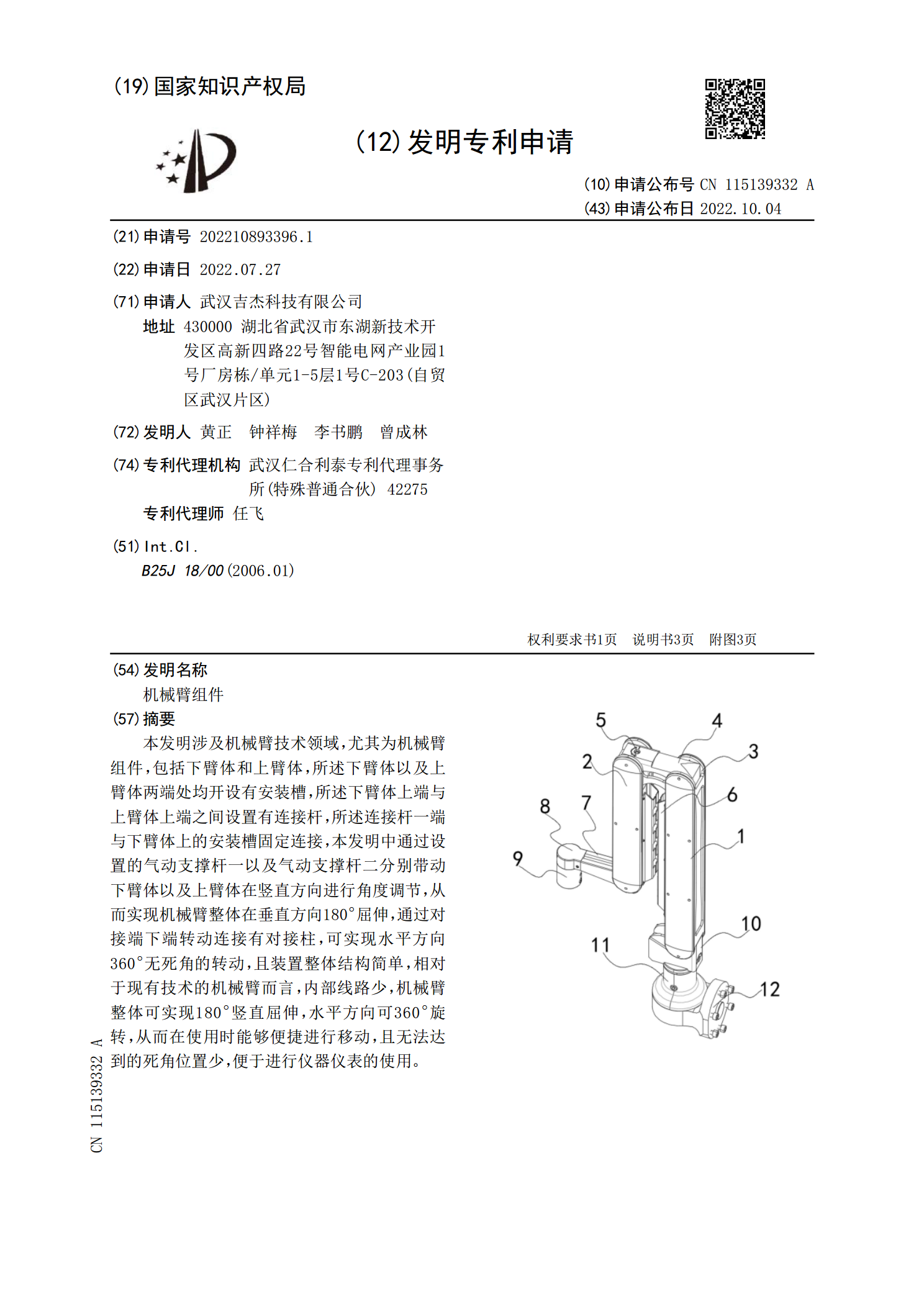
本发明涉及机械臂技术领域,尤其为机械臂组件,包括下臂体和上臂体,所述下臂体以及上臂体两端处均开设有安装槽,所述下臂体上端与上臂体上端之间设置有连接杆,所述连接杆一端与下臂体上的安装槽固定连接,本发明中通过设置的气动支撑杆一以及气动支撑杆二分别带动下臂体以及上臂体在竖直方向进行角度调节,从而实现机械臂整体在垂直方向180°屈伸,通过对接端下端转动连接有对接柱,可实现水平方向360°无死角的转动,且装置整体结构简单,相对于现有技术的机械臂而言,内部线路少,机械臂整体可实现180°竖直屈伸,水平方向可360°旋
导管机械臂与导管组件.pdf
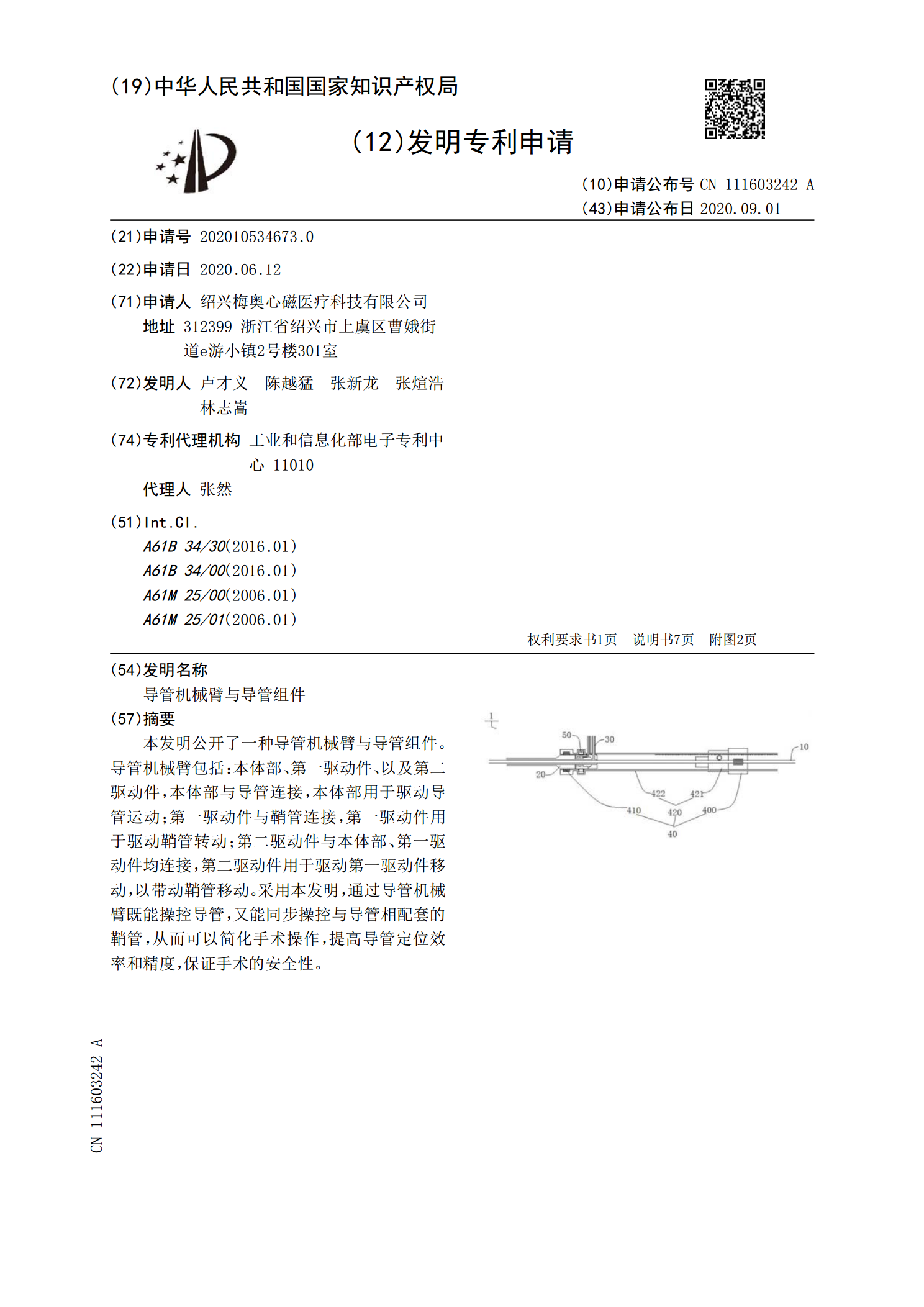
本发明公开了一种导管机械臂与导管组件。导管机械臂包括:本体部、第一驱动件、以及第二驱动件,本体部与导管连接,本体部用于驱动导管运动;第一驱动件与鞘管连接,第一驱动件用于驱动鞘管转动;第二驱动件与本体部、第一驱动件均连接,第二驱动件用于驱动第一驱动件移动,以带动鞘管移动。采用本发明,通过导管机械臂既能操控导管,又能同步操控与导管相配套的鞘管,从而可以简化手术操作,提高导管定位效率和精度,保证手术的安全性。
机械臂及其关节模组、编码组件.pdf
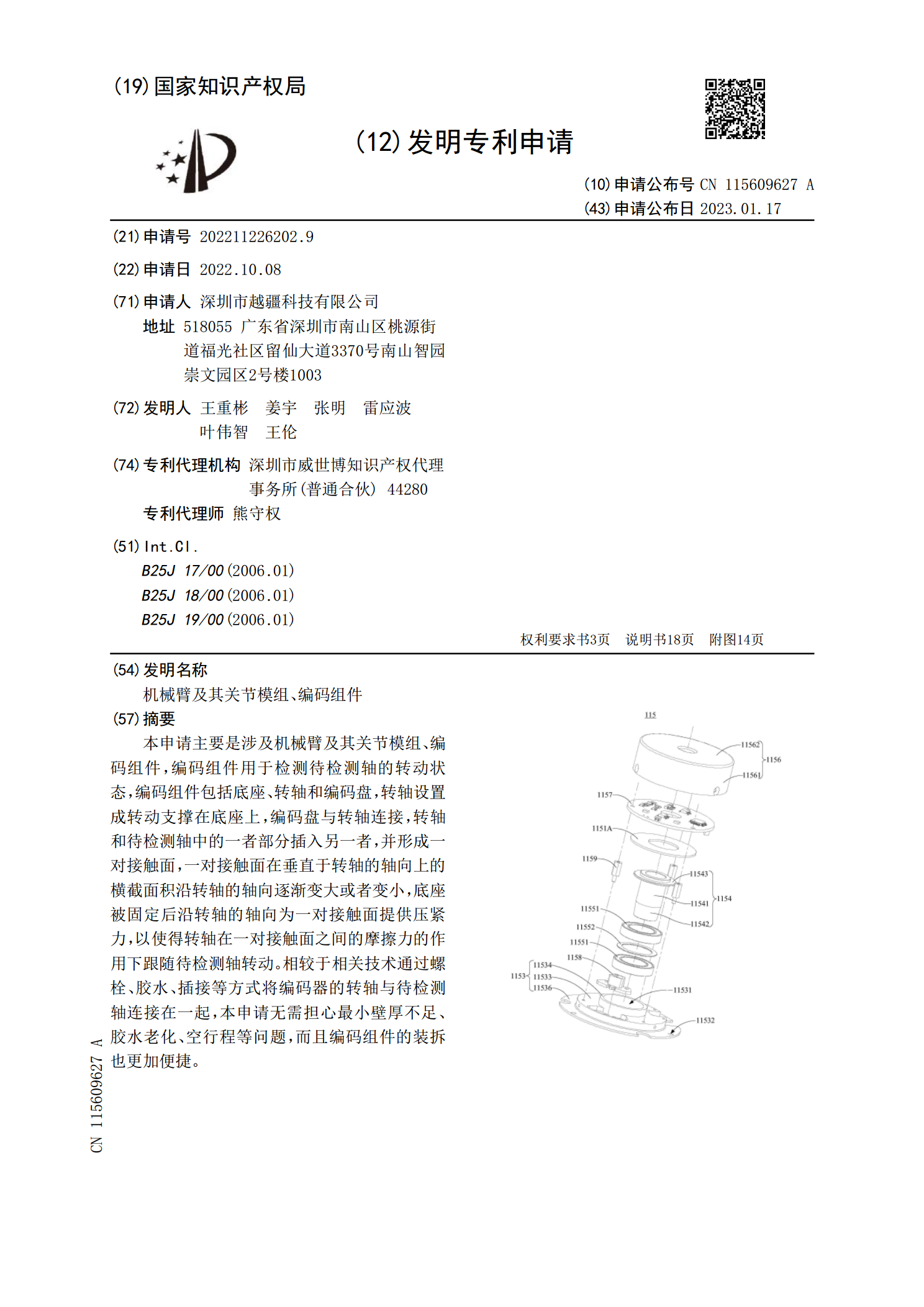
本申请主要是涉及机械臂及其关节模组、编码组件,编码组件包括底座、轴承、转轴和光栅盘,底座上设有轴承孔,轴承嵌设在轴承孔内,转轴包括连接部和与连接部连接的外延部,连接部嵌设在轴承的内圈上,外延部沿转轴的轴向压持轴承的内圈,外延部沿转轴的轴向正投影至底座时完全覆盖轴承孔,光栅盘与外延部连接。本申请提供的编码组件中,通过转轴的外延部完全覆盖底座上的轴承孔,以在一定程度上阻碍外界杂物经由轴承孔进入编码组件内,这样有利于增加编码组的防尘性能。

机械臂组件及手术机器人.pdf
本发明公开了一种机械臂组件及手术机器人。机械臂组件包括第一自由臂、第二自由臂、第一球头关节、第二球头关节、第一锁定机构、第二锁定机构以及调节机构。第一自由臂包括第一外臂和第一回拉部件;第二自由臂包括第二外臂和第二回拉部件;第一球头关节包括第一球套和第一球头部;第二球头关节包括第二球套和第二球头部;调节机构包括调节部件、主轴以及推动部件,推动部件设置于主轴上,第一套体和第二套体均套设在主轴上并位于推动部件的外周,且第一回拉部件远离第一球头关节的一端连接在主轴上,第二回拉部件远离第二球头关节的一端连接在主轴上

喷臂组件及应用该喷臂组件的喷淋系统.pdf
本发明提供一种清洗机的喷臂组件,包括喷臂、连接套件、支撑架体,喷臂形成出水口,喷臂内形成与出水口联通的流道,喷臂、形成与出水口、流道联通的容纳腔,喷臂的下表面在对应容纳腔的位置处开设通孔,通孔与容纳腔联通,喷臂下方形成一围绕出水口的连接臂,连接臂或连接套件的其中一个为能径向伸缩的挠性连接件,连接臂与连接套件套合后卡扣连接,支撑架体包括主架体以及连接在主架体上部的连接导引环,连接导引环与连接臂转动连接,连接导引环与连接套件上下卡扣后使得连接套件能与支撑架体上下限位的转动连接。本发明所述喷臂组件通过连接套件将