
导管机械臂与导管组件.pdf

爱欢****23

1/10

2/10
3/10

4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
导管机械臂与导管组件.pdf
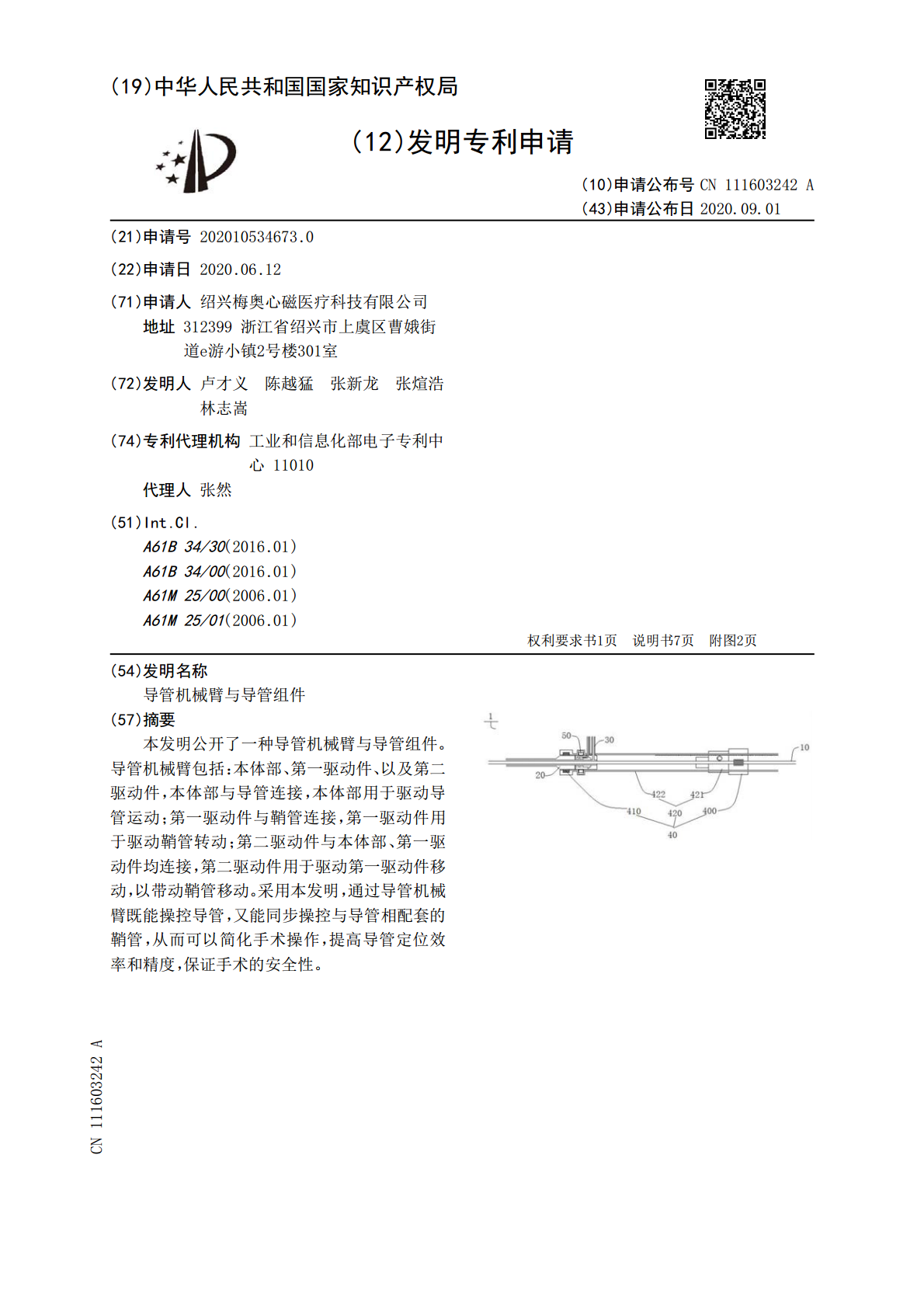
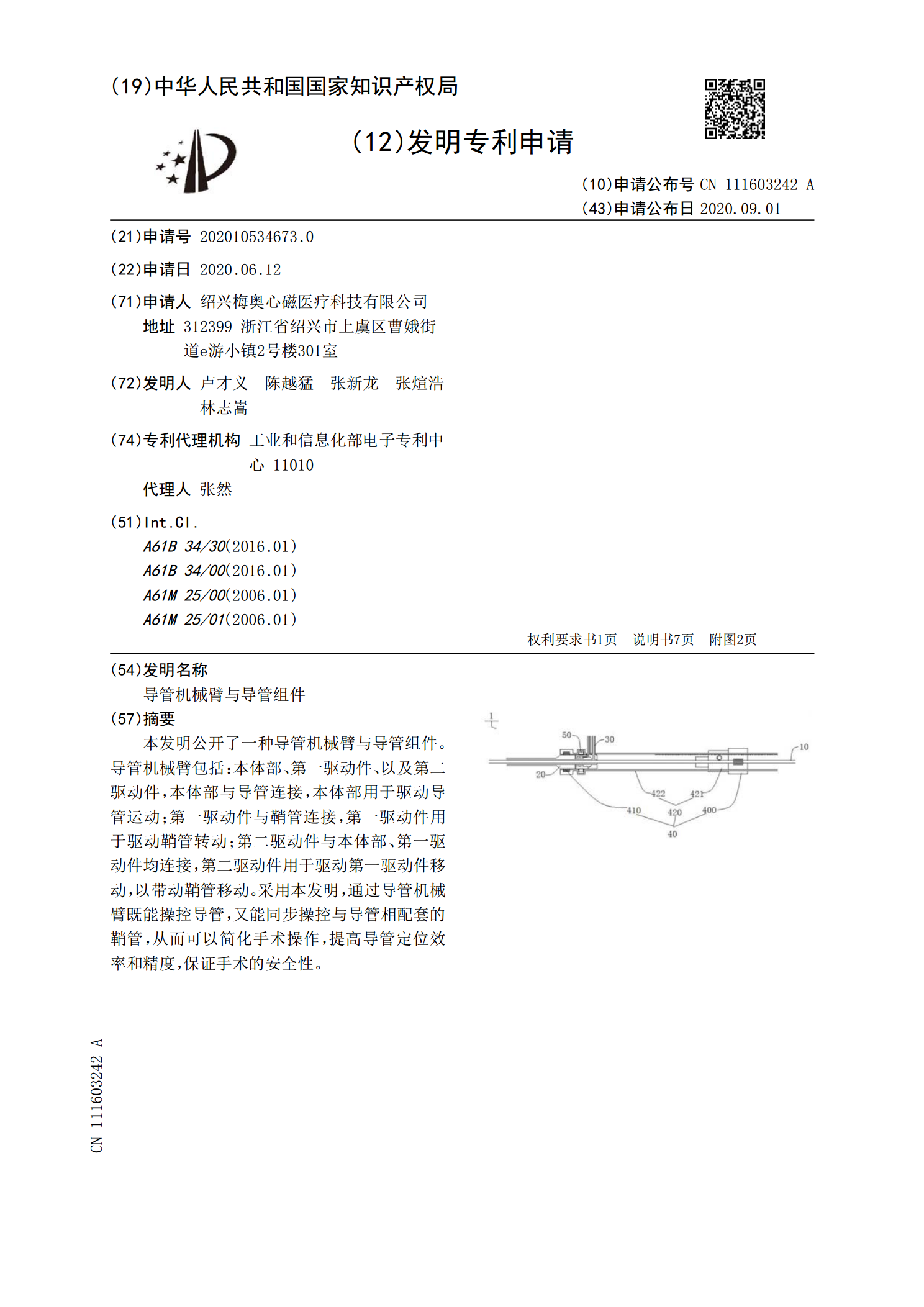
本发明公开了一种导管机械臂与导管组件。导管机械臂包括:本体部、第一驱动件、以及第二驱动件,本体部与导管连接,本体部用于驱动导管运动;第一驱动件与鞘管连接,第一驱动件用于驱动鞘管转动;第二驱动件与本体部、第一驱动件均连接,第二驱动件用于驱动第一驱动件移动,以带动鞘管移动。采用本发明,通过导管机械臂既能操控导管,又能同步操控与导管相配套的鞘管,从而可以简化手术操作,提高导管定位效率和精度,保证手术的安全性。
导管阀体组件及其导管.pdf
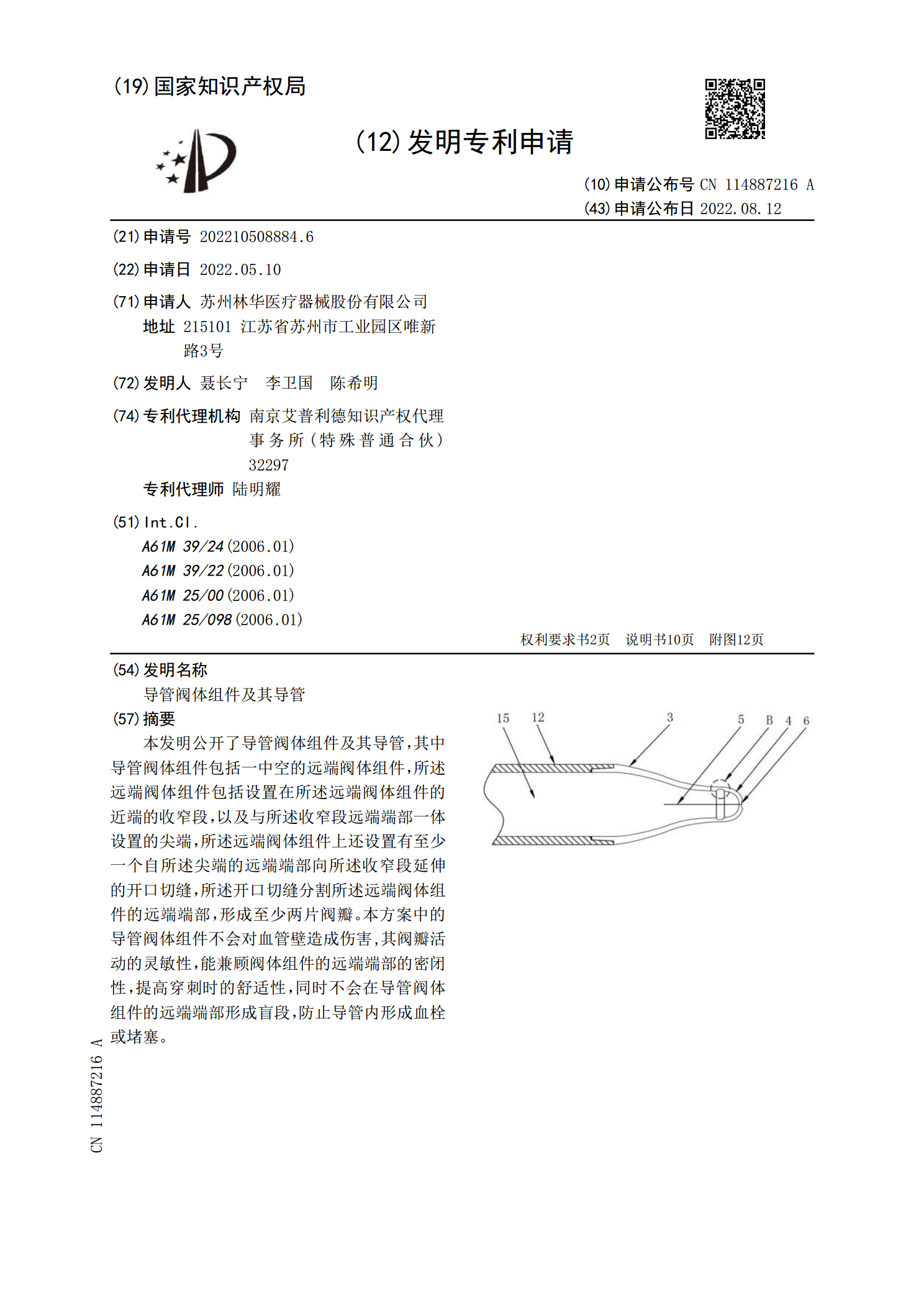
本发明公开了导管阀体组件及其导管,其中导管阀体组件包括一中空的远端阀体组件,所述远端阀体组件包括设置在所述远端阀体组件的近端的收窄段,以及与所述收窄段远端端部一体设置的尖端,所述远端阀体组件上还设置有至少一个自所述尖端的远端端部向所述收窄段延伸的开口切缝,所述开口切缝分割所述远端阀体组件的远端端部,形成至少两片阀瓣。本方案中的导管阀体组件不会对血管壁造成伤害,其阀瓣活动的灵敏性,能兼顾阀体组件的远端端部的密闭性,提高穿刺时的舒适性,同时不会在导管阀体组件的远端端部形成盲段,防止导管内形成血栓或堵塞。

导管组件.pdf
本发明涉及一种导管组件,其包括导管毂、空心管状导管、针、阀组件、阀开启器和针护套组件。针护套组件包括外壳和设置在外壳内的针护套。针延伸穿过外壳,外壳具有远端和近端并且在其远端连接到导管毂的近端。针护套包括针阱、弹性臂和联接臂。针阱能够在准备位置和保护位置之间移动。在准备位置,针阱被保持到针的杆的一侧,在保护位置,针阱将针的尖锐针尖阻挡在外壳内。弹性臂支撑在外壳的内壁上,以将针阱推动到保护位置。在准备位置,针阱和弹性臂一起折叠到针杆的一侧。在准备位置,联接臂将外壳联接到导管毂的近端。针阱从准备位置到保护位置
导管组件.pdf
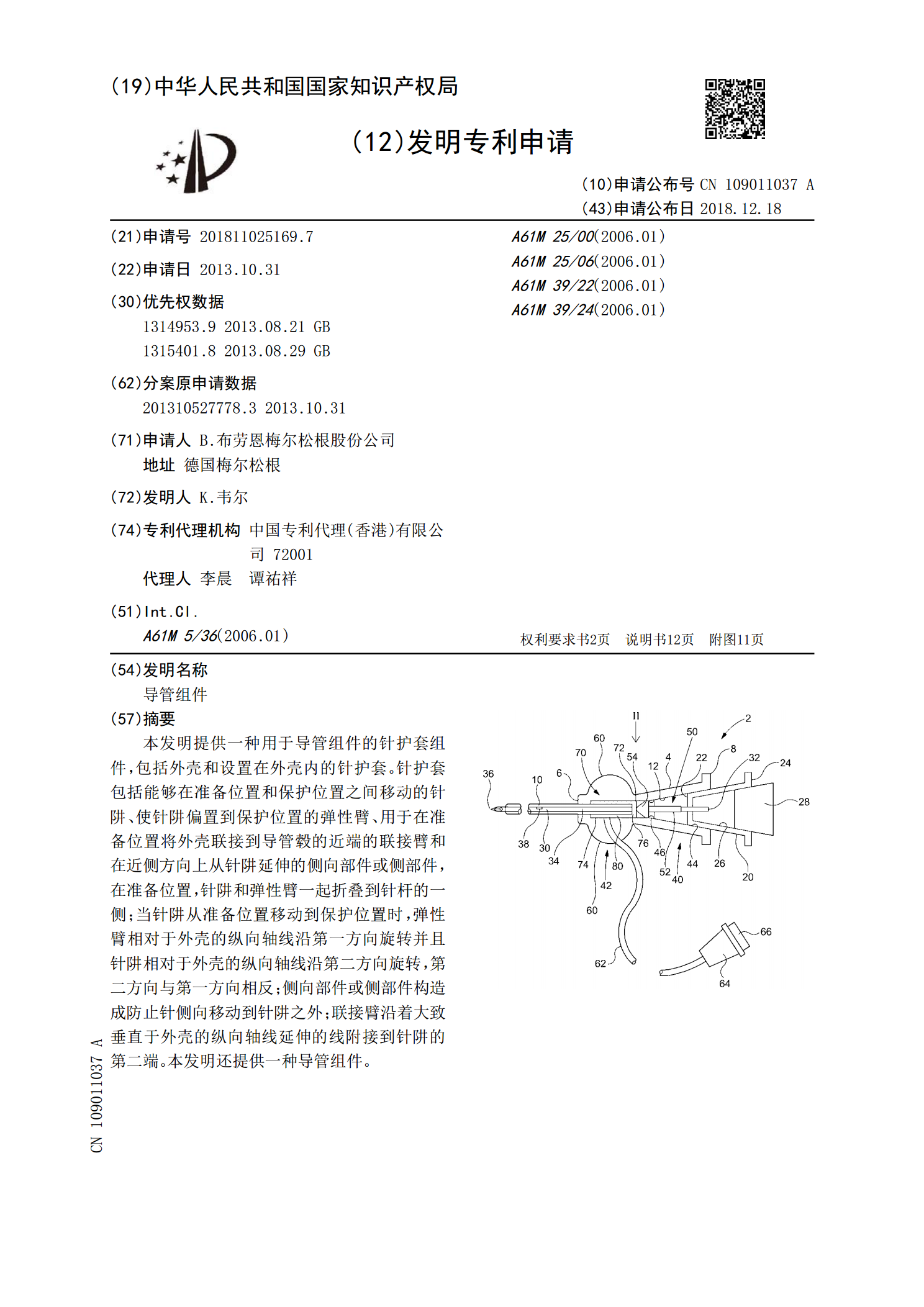
本发明提供一种用于导管组件的针护套组件,包括外壳和设置在外壳内的针护套。针护套包括能够在准备位置和保护位置之间移动的针阱、使针阱偏置到保护位置的弹性臂、用于在准备位置将外壳联接到导管毂的近端的联接臂和在近侧方向上从针阱延伸的侧向部件或侧部件,在准备位置,针阱和弹性臂一起折叠到针杆的一侧;当针阱从准备位置移动到保护位置时,弹性臂相对于外壳的纵向轴线沿第一方向旋转并且针阱相对于外壳的纵向轴线沿第二方向旋转,第二方向与第一方向相反;侧向部件或侧部件构造成防止针侧向移动到针阱之外;联接臂沿着大致垂直于外壳的纵向轴

导管组件.pdf
本发明提供一种导管组件,包括:其内具有室的导管毂,导管毂具有远端和近端,导管毂在其近端能够连接到用于将流体输注到导管毂内的室或者将流体从室中抽出的装置;具有近端和远端的空心管状导管,导管在其近端连接到导管毂的远端,导管的内部通向导管毂内的室中;具有尖锐针尖的针,在准备位置,针延伸穿过导管毂内的室和导管并且针尖延伸超过导管的远端;具有远端和近端的空心的延伸管,延伸管在其远端连接到导管毂的近端和远端之间,延伸管在其远端通向导管毂内的室中,延伸管在其近端能够连接到用于将流体输注到导管毂内的室中的装置;设置在导管