
一种固定翼无人机舰载智能轨道快速起降平台.pdf

慧红****ad

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种固定翼无人机舰载智能轨道快速起降平台.pdf
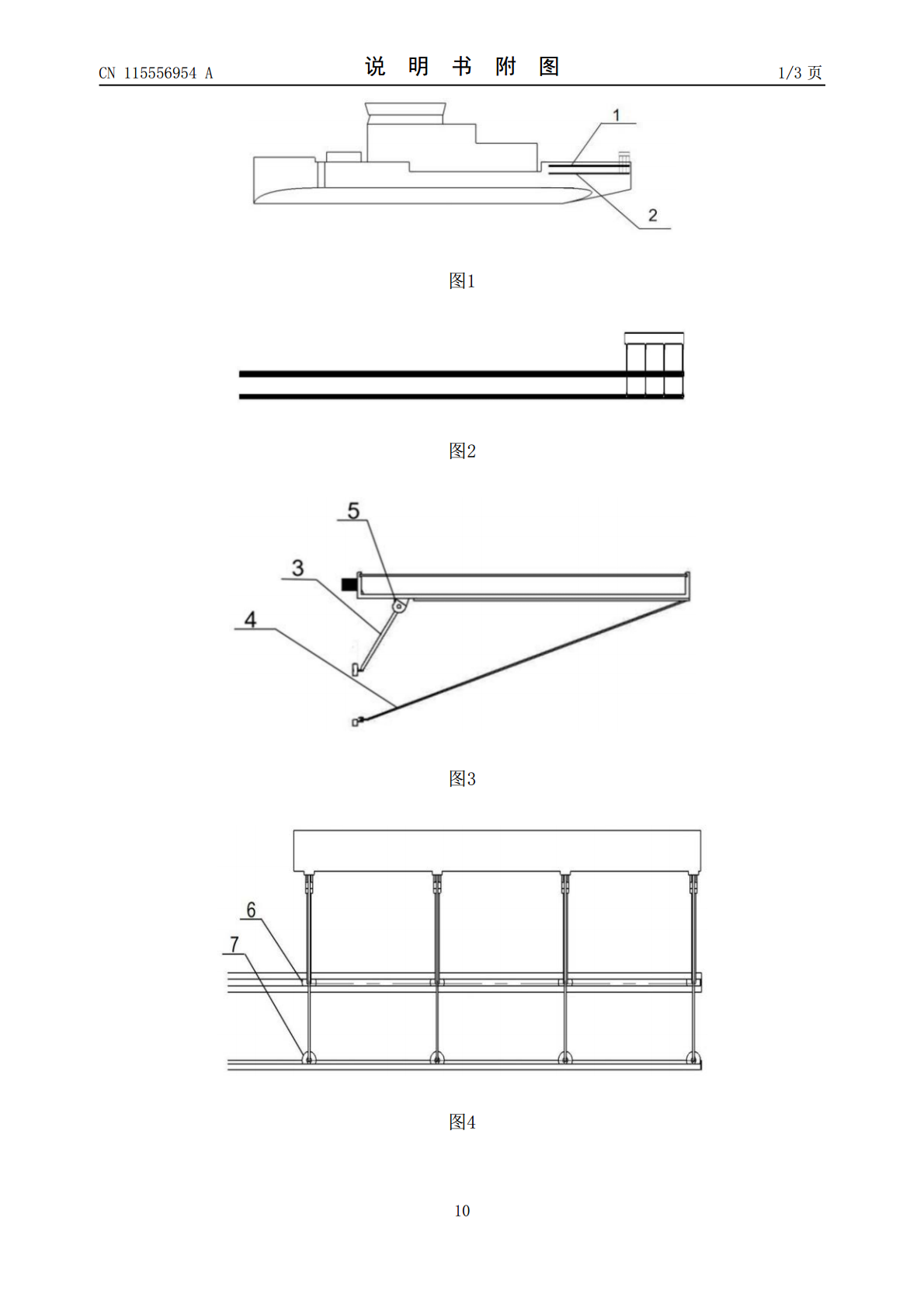
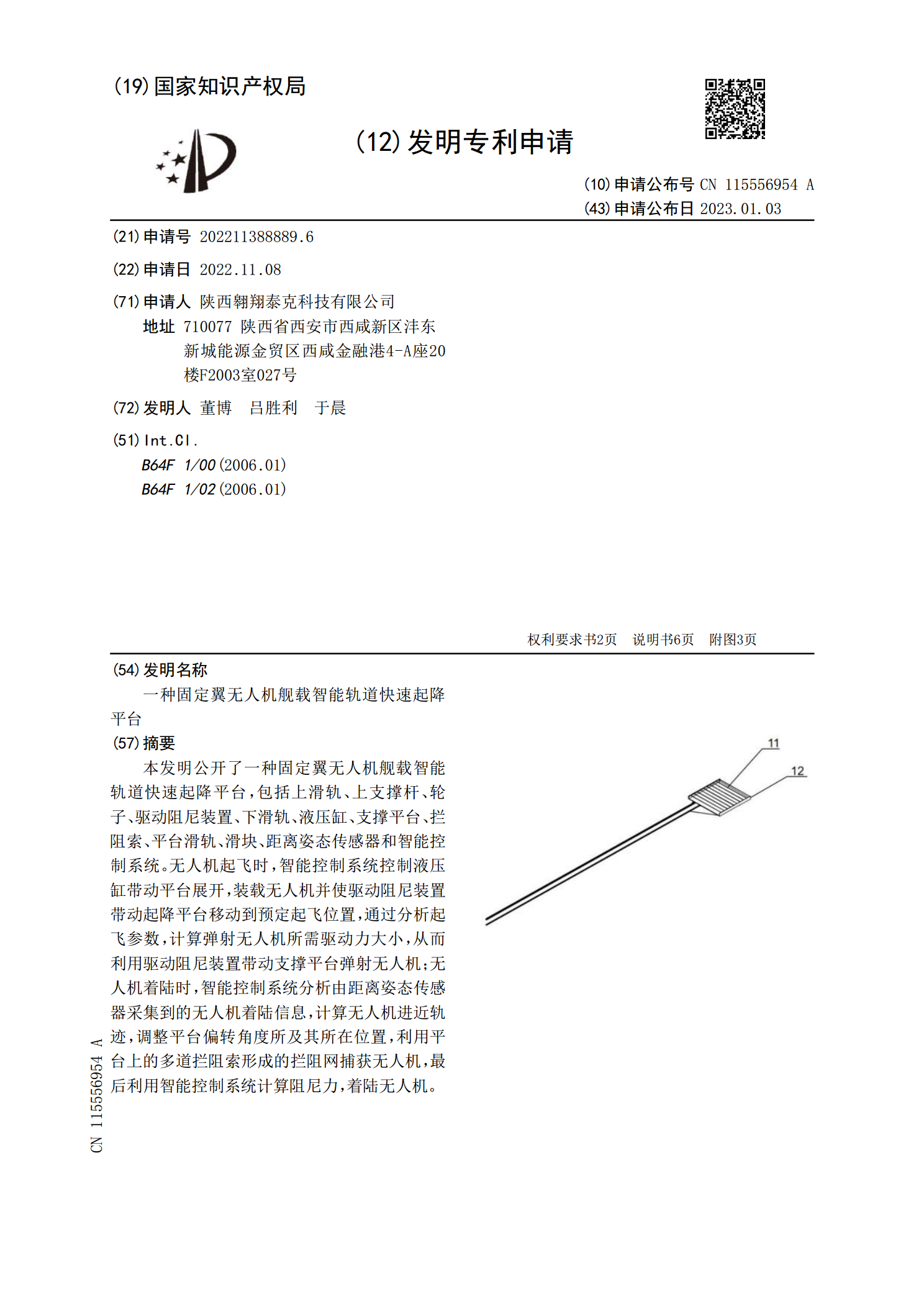
本发明公开了一种固定翼无人机舰载智能轨道快速起降平台,包括上滑轨、上支撑杆、轮子、驱动阻尼装置、下滑轨、液压缸、支撑平台、拦阻索、平台滑轨、滑块、距离姿态传感器和智能控制系统。无人机起飞时,智能控制系统控制液压缸带动平台展开,装载无人机并使驱动阻尼装置带动起降平台移动到预定起飞位置,通过分析起飞参数,计算弹射无人机所需驱动力大小,从而利用驱动阻尼装置带动支撑平台弹射无人机;无人机着陆时,智能控制系统分析由距离姿态传感器采集到的无人机着陆信息,计算无人机进近轨迹,调整平台偏转角度所及其所在位置,利用平台上的
电力巡检用垂直起降固定翼无人机的移动式智能起降平台.pdf
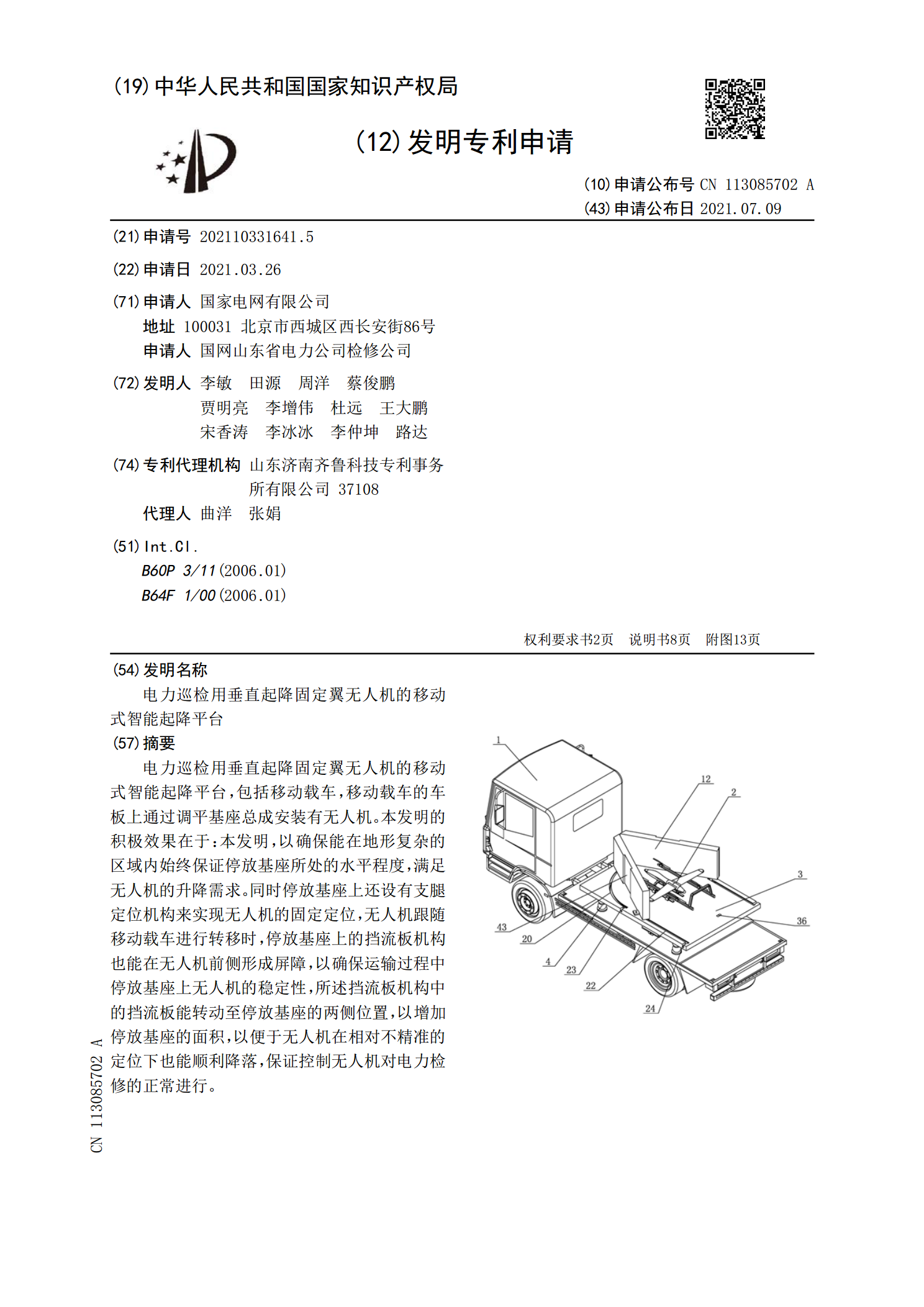
电力巡检用垂直起降固定翼无人机的移动式智能起降平台,包括移动载车,移动载车的车板上通过调平基座总成安装有无人机。本发明的积极效果在于:本发明,以确保能在地形复杂的区域内始终保证停放基座所处的水平程度,满足无人机的升降需求。同时停放基座上还设有支腿定位机构来实现无人机的固定定位,无人机跟随移动载车进行转移时,停放基座上的挡流板机构也能在无人机前侧形成屏障,以确保运输过程中停放基座上无人机的稳定性,所述挡流板机构中的挡流板能转动至停放基座的两侧位置,以增加停放基座的面积,以便于无人机在相对不精准的定位下也能顺

一种小型舰载固定翼无人机.pdf
本发明涉及海洋探测无人机,特别涉及一种小型舰载固定翼无人机。该小型舰载固定翼无人机包括机头、机身、右机翼、右尾翼、左尾翼、回收钩组件、左机翼及回收钩锁定机构,其中机头设置于机身的前端,右机翼和左机翼对称设置于机身前部两侧,右机翼和左机翼上分别水平设有右电动螺旋桨和左电动螺旋桨,右尾翼和左尾翼对称设置于机身尾部,回收钩组件设置于机身的底部,回收钩锁定机构设置于机身内,回收钩锁定机构用于驱动和锁定回收钩组件,回收钩组件用于固定翼无人机的回收。本发明有效提升了无人机的发射回收成功率,使海洋探测无人机的发射/回收
一种垂直起降固定翼无人机.pdf
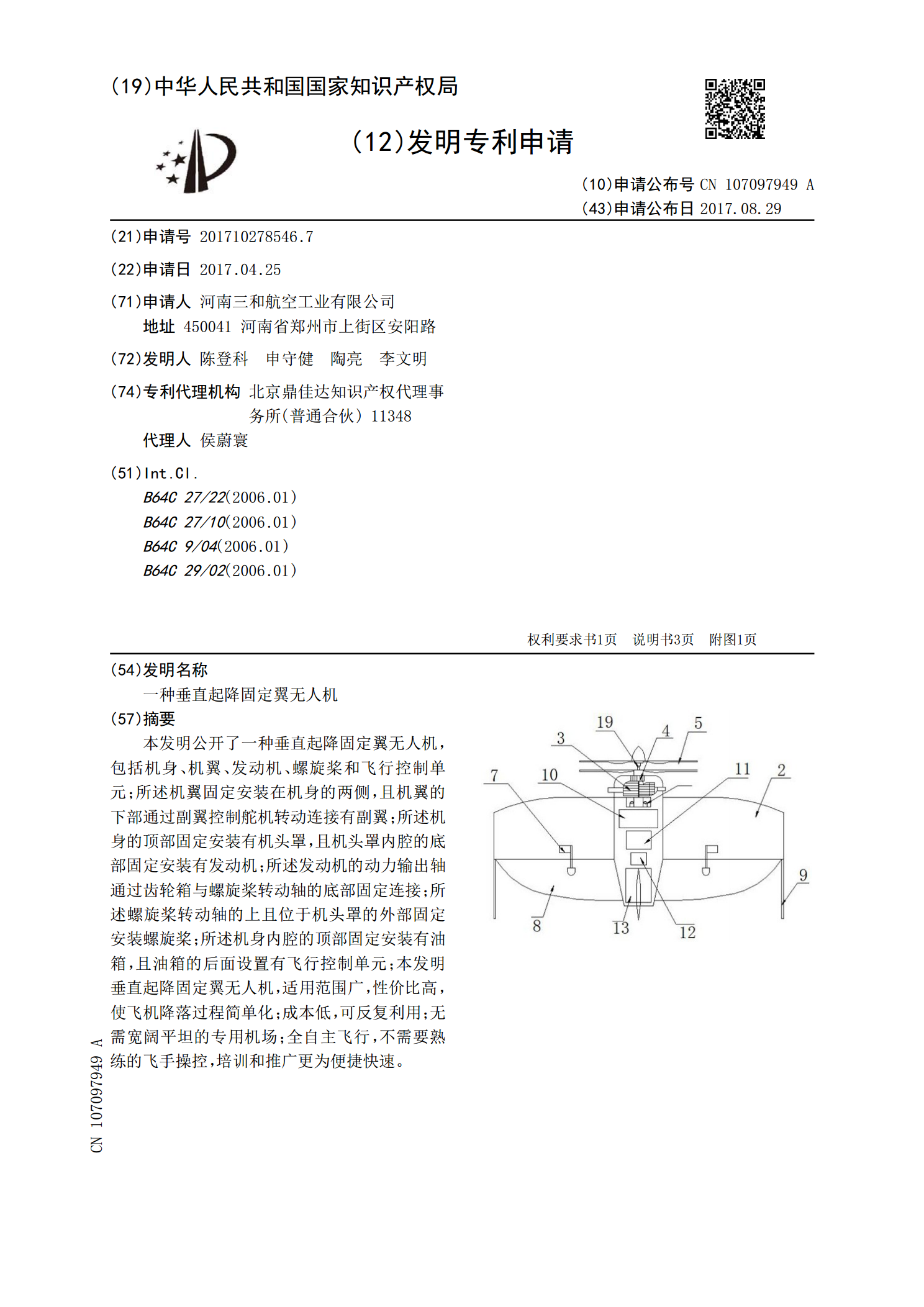
本发明公开了一种垂直起降固定翼无人机,包括机身、机翼、发动机、螺旋桨和飞行控制单元;所述机翼固定安装在机身的两侧,且机翼的下部通过副翼控制舵机转动连接有副翼;所述机身的顶部固定安装有机头罩,且机头罩内腔的底部固定安装有发动机;所述发动机的动力输出轴通过齿轮箱与螺旋桨转动轴的底部固定连接;所述螺旋桨转动轴的上且位于机头罩的外部固定安装螺旋桨;所述机身内腔的顶部固定安装有油箱,且油箱的后面设置有飞行控制单元;本发明垂直起降固定翼无人机,适用范围广,性价比高,使飞机降落过程简单化;成本低,可反复利用;无需宽阔平
垂直起降固定翼无人机飞行原理.pdf
垂直起降固定翼无人机飞行原理垂直起降固定翼无人机,也被称为VTOL固定翼无人机,是一种具有跨越直升机和传统固定翼无人机两种飞行模式的航空器。这种飞行器既能够在垂直方向起降,又可以在空中以高速飞行,具有灵活性和高效性的特点,因此在军事、工业、民用和科学研究领域都得到了广泛的应用。下文将介绍垂直起降固定翼无人机的飞行原理、组成和应用场景。一、飞行原理垂直起降固定翼无人机的飞行原理可以分为两个部分:一是起降阶段,二是巡航阶段。1.起降阶段在起降阶段,垂直起降固定翼无人机需要利用四个或者多个垂直起降发动机来实现飞