
一种仓储物流用搬运机器人的升降驱动组件.pdf

一吃****书竹

1/8

2/8
3/8

4/8
5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种仓储物流用搬运机器人的升降驱动组件.pdf
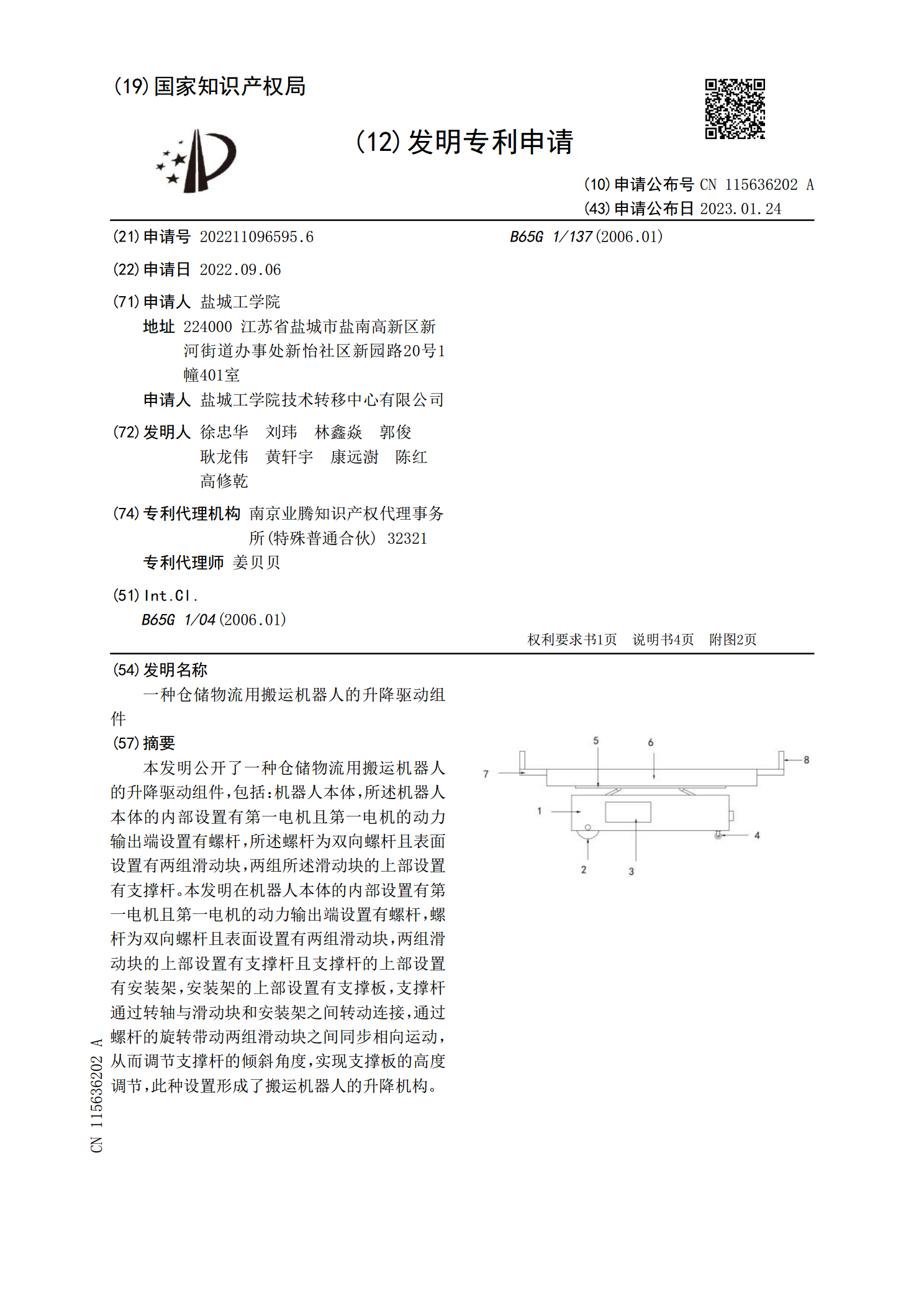
本发明公开了一种仓储物流用搬运机器人的升降驱动组件,包括:机器人本体,所述机器人本体的内部设置有第一电机且第一电机的动力输出端设置有螺杆,所述螺杆为双向螺杆且表面设置有两组滑动块,两组所述滑动块的上部设置有支撑杆。本发明在机器人本体的内部设置有第一电机且第一电机的动力输出端设置有螺杆,螺杆为双向螺杆且表面设置有两组滑动块,两组滑动块的上部设置有支撑杆且支撑杆的上部设置有安装架,安装架的上部设置有支撑板,支撑杆通过转轴与滑动块和安装架之间转动连接,通过螺杆的旋转带动两组滑动块之间同步相向运动,从而调节支撑杆
仓储物流用搬运机器人的托架及搬运机器人.pdf
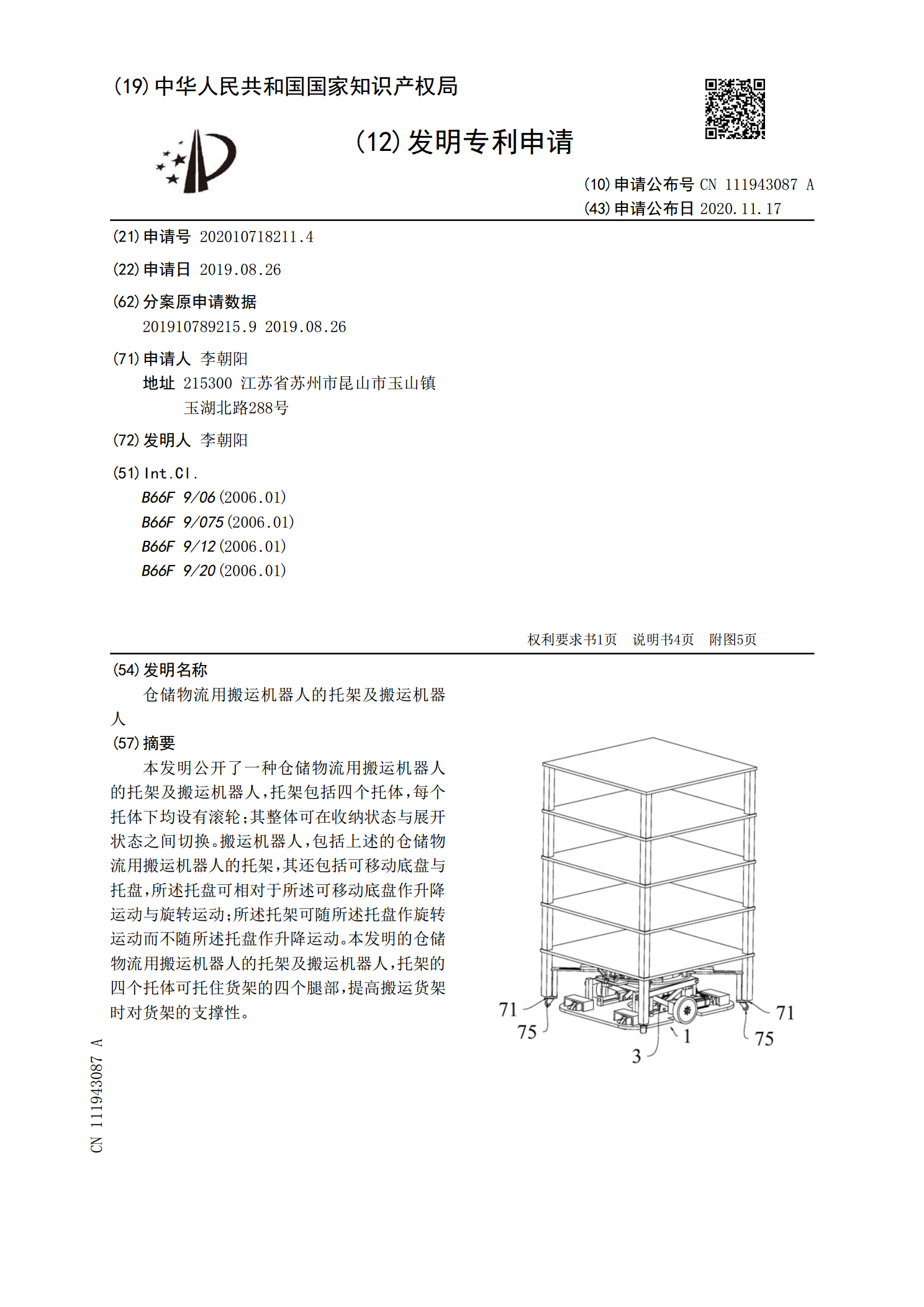
本发明公开了一种仓储物流用搬运机器人的托架及搬运机器人,托架包括四个托体,每个托体下均设有滚轮;其整体可在收纳状态与展开状态之间切换。搬运机器人,包括上述的仓储物流用搬运机器人的托架,其还包括可移动底盘与托盘,所述托盘可相对于所述可移动底盘作升降运动与旋转运动;所述托架可随所述托盘作旋转运动而不随所述托盘作升降运动。本发明的仓储物流用搬运机器人的托架及搬运机器人,托架的四个托体可托住货架的四个腿部,提高搬运货架时对货架的支撑性。

一种升降搬运设备组件.pdf
本发明公开了一种升降搬运设备组件,包括搬运设备及货架,该搬运设备能够直接通过对接装置的机械臂导向块与立柱上的链条对接,对接方式为通过机械臂导向块外凸的爬升链轮与链条配合,对接完成后,再通过爬升驱动装置驱动爬升轴转动而带动爬升链轮在链条上爬升或者下降,从而实现搬运设备在不同高度的货架上爬升或下降。该搬运设备在货架上的爬升和下降不需要借助其他如有升降平台等辅助升降设备。
一种仓储搬运机器人.pdf
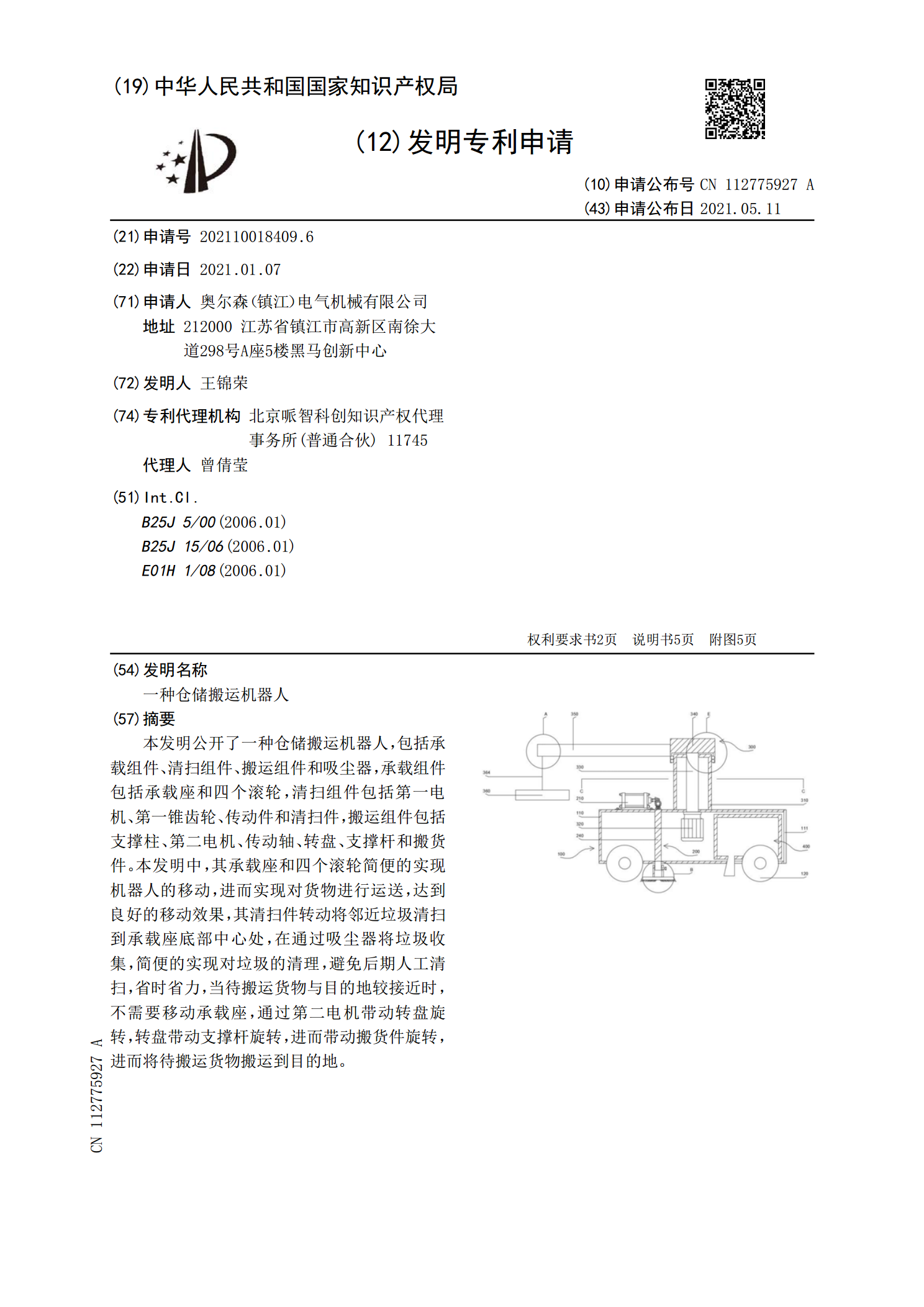
本发明公开了一种仓储搬运机器人,包括承载组件、清扫组件、搬运组件和吸尘器,承载组件包括承载座和四个滚轮,清扫组件包括第一电机、第一锥齿轮、传动件和清扫件,搬运组件包括支撑柱、第二电机、传动轴、转盘、支撑杆和搬货件。本发明中,其承载座和四个滚轮简便的实现机器人的移动,进而实现对货物进行运送,达到良好的移动效果,其清扫件转动将邻近垃圾清扫到承载座底部中心处,在通过吸尘器将垃圾收集,简便的实现对垃圾的清理,避免后期人工清扫,省时省力,当待搬运货物与目的地较接近时,不需要移动承载座,通过第二电机带动转盘旋转,转盘

一种智能搬运的物流用工业机器人.pdf
本发明公开了一种智能搬运的物流用工业机器人,包括车体、导轨架、压板、托盘,所述车体的下端设有车轮,所述车体的上端设有托盘,所述托盘的两侧设有防护架,所述托盘的前端设有导轨架,所述导轨架上设有活动孔,所述活动孔内设有相互平行的丝杠与滑杆,所述车体的上端设有与丝杠连接的电机,所述压板的一端分别与丝杠、滑杆配合,所述托盘的上端设有与电机连接的微动开关。在托盘的两侧设有防护架,托盘的前端设有导轨架,导轨架上设置压板,通过防护架与压板能够对快递件进行遮挡与压紧,防止车体在运输过程中快递件掉落,保证了输送安全与运输效