
一种用于步态康复训练的结构型减重系统.pdf

琰琬****买买

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于步态康复训练的结构型减重系统.pdf
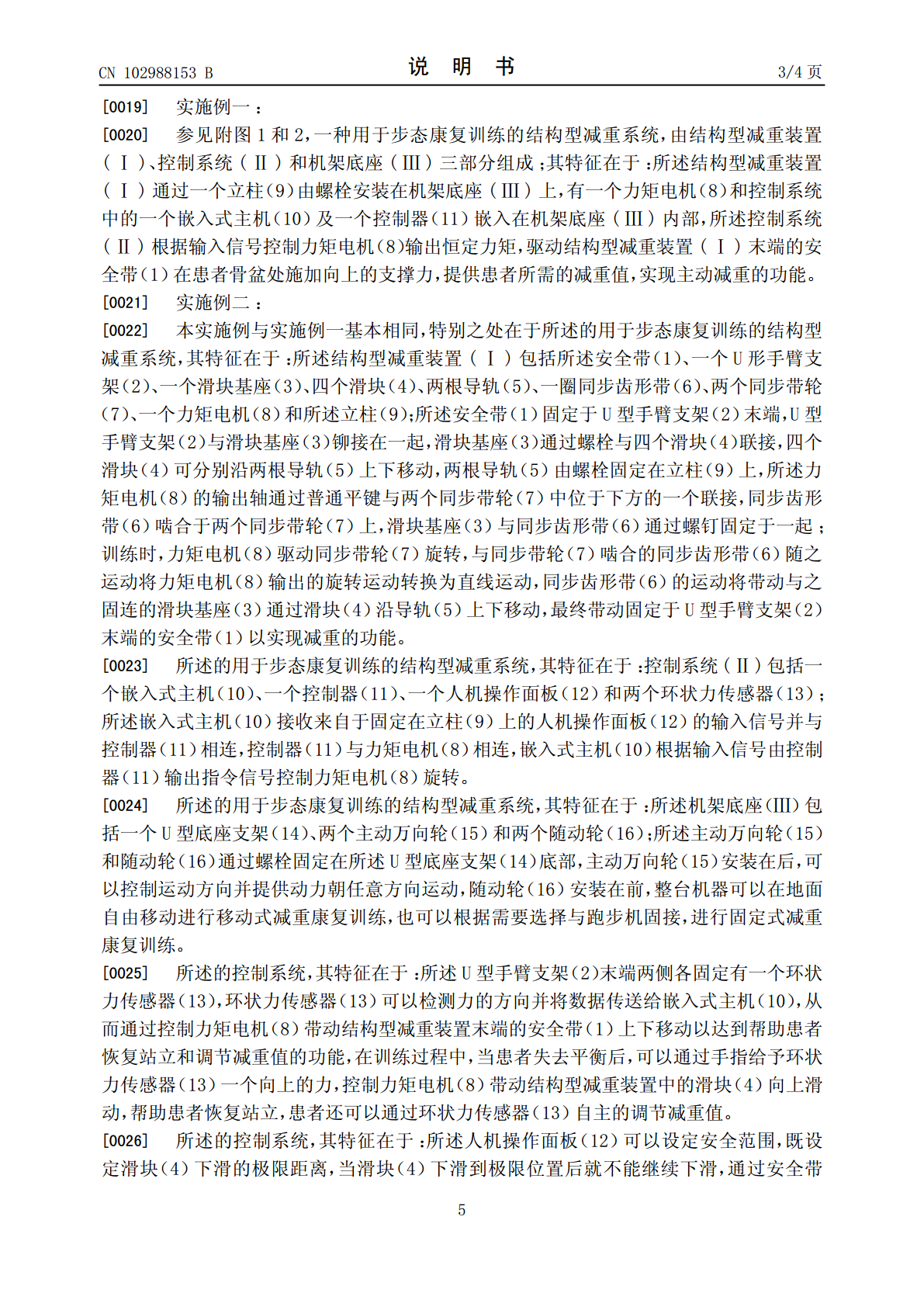
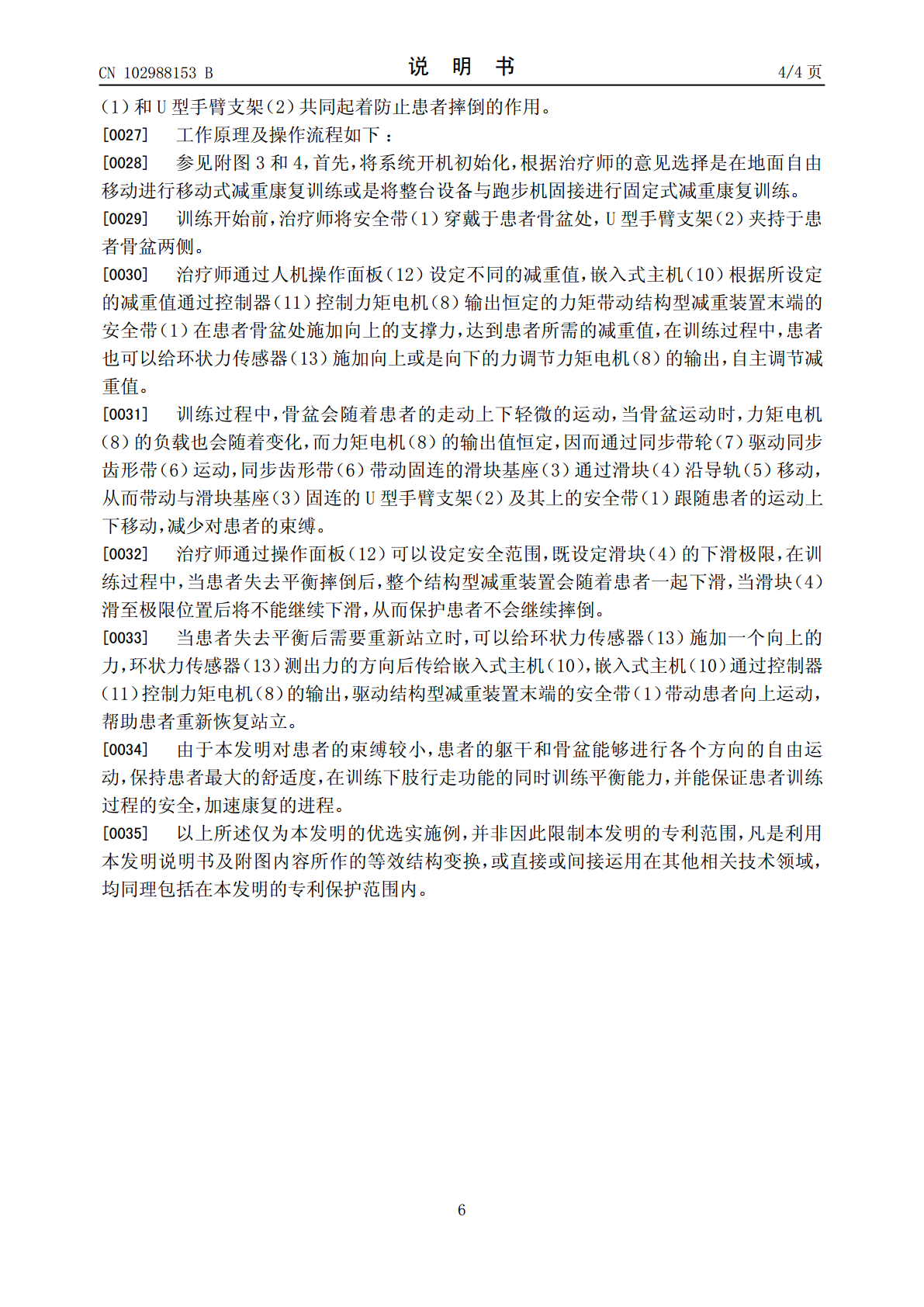
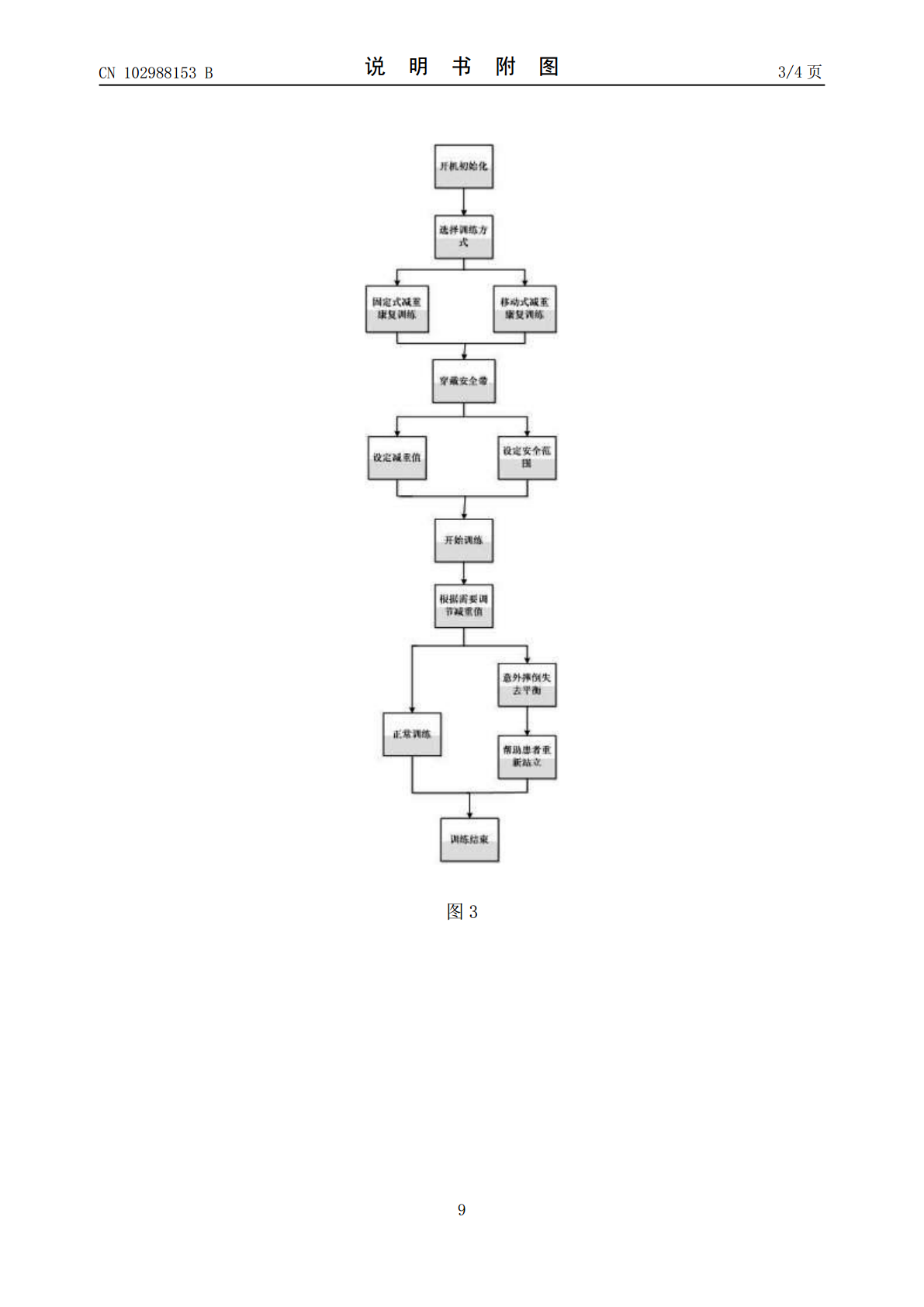
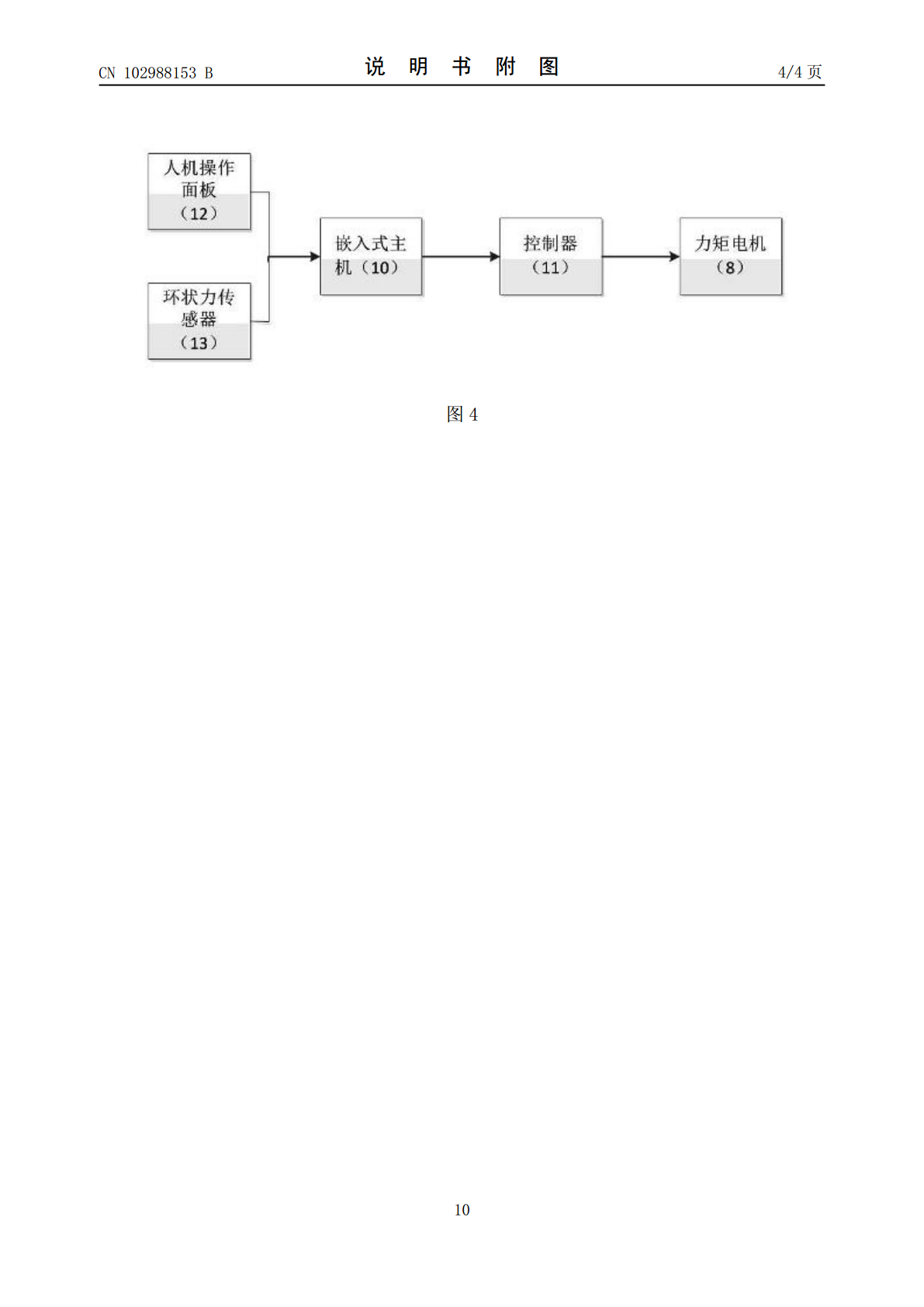
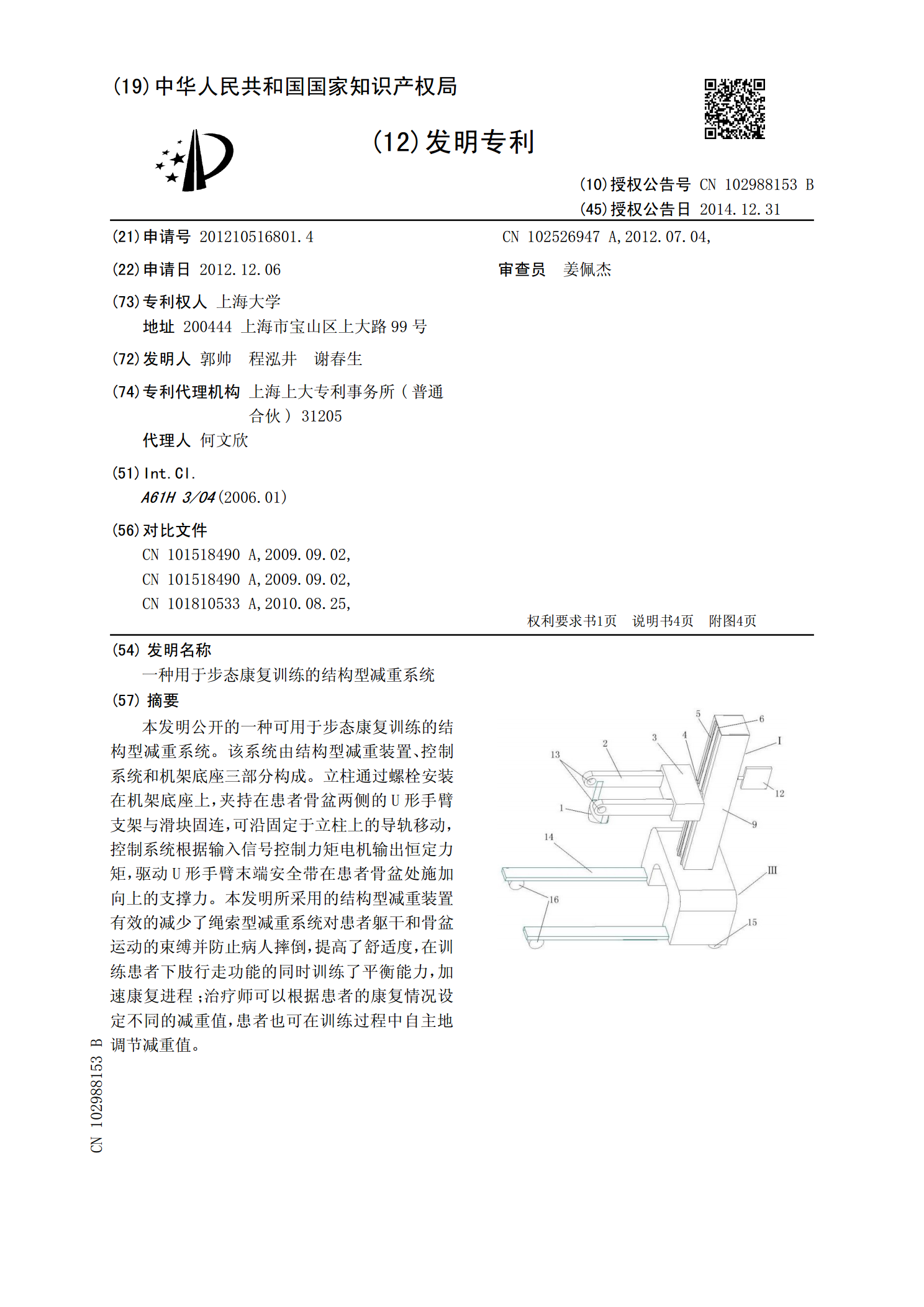
本发明公开的一种可用于步态康复训练的结构型减重系统。该系统由结构型减重装置、控制系统和机架底座三部分构成。立柱通过螺栓安装在机架底座上,夹持在患者骨盆两侧的U形手臂支架与滑块固连,可沿固定于立柱上的导轨移动,控制系统根据输入信号控制力矩电机输出恒定力矩,驱动U形手臂末端安全带在患者骨盆处施加向上的支撑力。本发明所采用的结构型减重装置有效的减少了绳索型减重系统对患者躯干和骨盆运动的束缚并防止病人摔倒,提高了舒适度,在训练患者下肢行走功能的同时训练了平衡能力,加速康复进程;治疗师可以根据患者的康复情况设定不同
一种用于下肢患者康复训练的减重系统.pdf
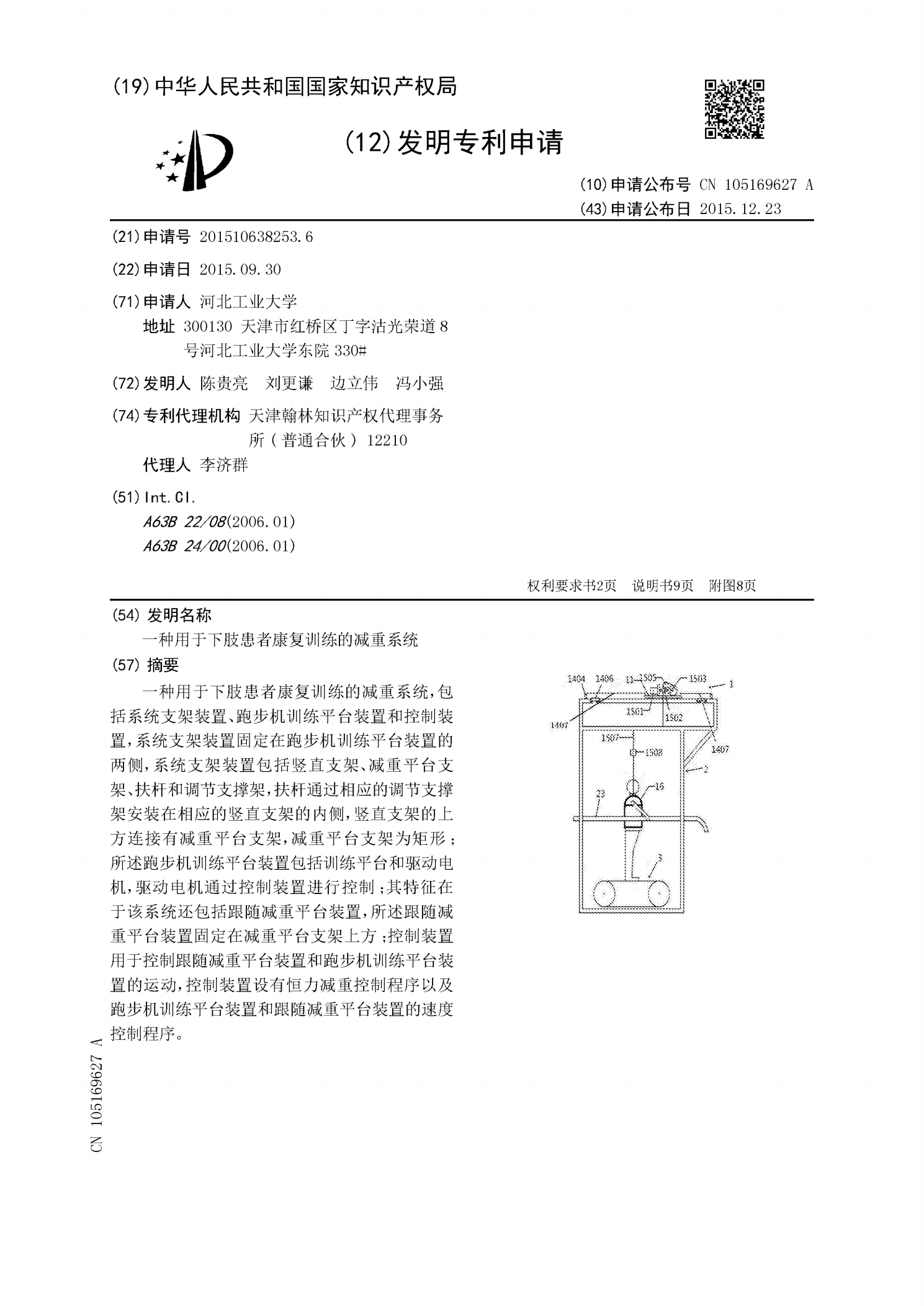
一种用于下肢患者康复训练的减重系统,包括系统支架装置、跑步机训练平台装置和控制装置,系统支架装置固定在跑步机训练平台装置的两侧,系统支架装置包括竖直支架、减重平台支架、扶杆和调节支撑架,扶杆通过相应的调节支撑架安装在相应的竖直支架的内侧,竖直支架的上方连接有减重平台支架,减重平台支架为矩形;所述跑步机训练平台装置包括训练平台和驱动电机,驱动电机通过控制装置进行控制;其特征在于该系统还包括跟随减重平台装置,所述跟随减重平台装置固定在减重平台支架上方;控制装置用于控制跟随减重平台装置和跑步机训练平台装置的运动

一种用于患者下肢康复训练的减重支撑系统.pdf
本公开提供一种用于患者下肢康复训练的减重支撑系统,包括减重支撑机构、下肢康复机器人固定装置和动态减重系统;所述下肢康复机器人固定装置安装在所述减重支撑机构上,所述动态减重系统固定于所述减重支撑机构的一侧的地面上;所述动态减重系统包括滑动导轨、绳索牵引端子、滑动绳轮、拉力传感器、缓冲弹簧、牵引绳索、固定销、减重电推杆、牵引绳索固定座和电推杆安装座。
一种面向步态和平衡康复训练的单绳悬吊主动减重系统.pdf
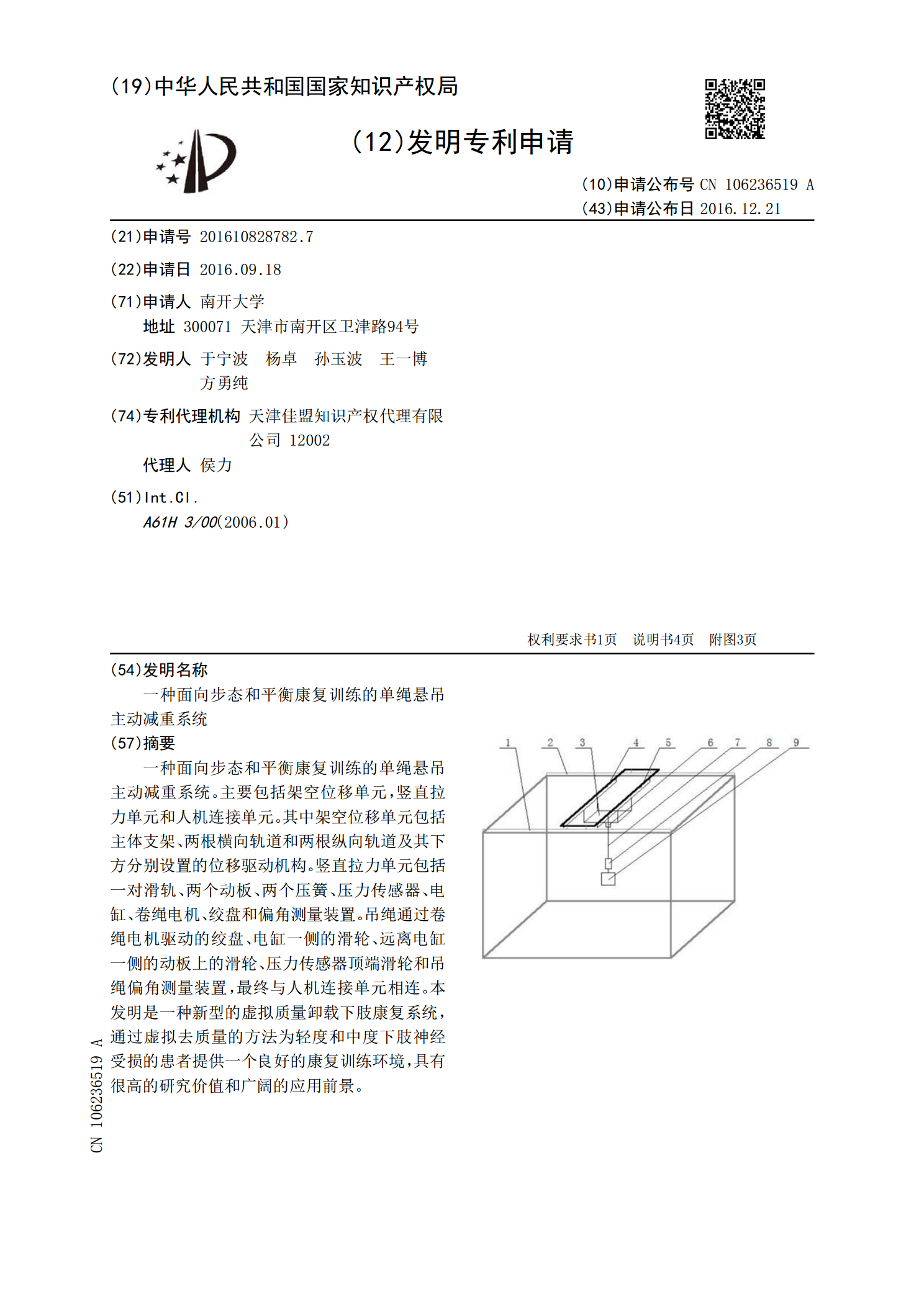
一种面向步态和平衡康复训练的单绳悬吊主动减重系统。主要包括架空位移单元,竖直拉力单元和人机连接单元。其中架空位移单元包括主体支架、两根横向轨道和两根纵向轨道及其下方分别设置的位移驱动机构。竖直拉力单元包括一对滑轨、两个动板、两个压簧、压力传感器、电缸、卷绳电机、绞盘和偏角测量装置。吊绳通过卷绳电机驱动的绞盘、电缸一侧的滑轮、远离电缸一侧的动板上的滑轮、压力传感器顶端滑轮和吊绳偏角测量装置,最终与人机连接单元相连。本发明是一种新型的虚拟质量卸载下肢康复系统,通过虚拟去质量的方法为轻度和中度下肢神经受损的患者

步态康复训练装置的减重技术研究现状.docx
步态康复训练装置的减重技术研究现状步态康复训练装置的减重技术研究现状摘要:步态康复训练装置是一种通过模拟人体行走动作,帮助患者进行步态康复训练的工具,减重技术是其中的关键技术之一。本文通过对国内外文献的综述和分析,总结了步态康复训练装置的减重技术研究现状,包括减重模式、减重机构、减重控制策略等方面。同时,指出了当前研究中存在的问题,并对未来的研究方向进行了展望。关键词:步态康复训练、减重技术、减重模式、减重机构、减重控制策略一、引言步态康复是指通过训练和治疗手段,帮助患者康复到原有的步态功能,提高其生活自