
头枕器.pdf

永香****能手

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
头枕器.pdf
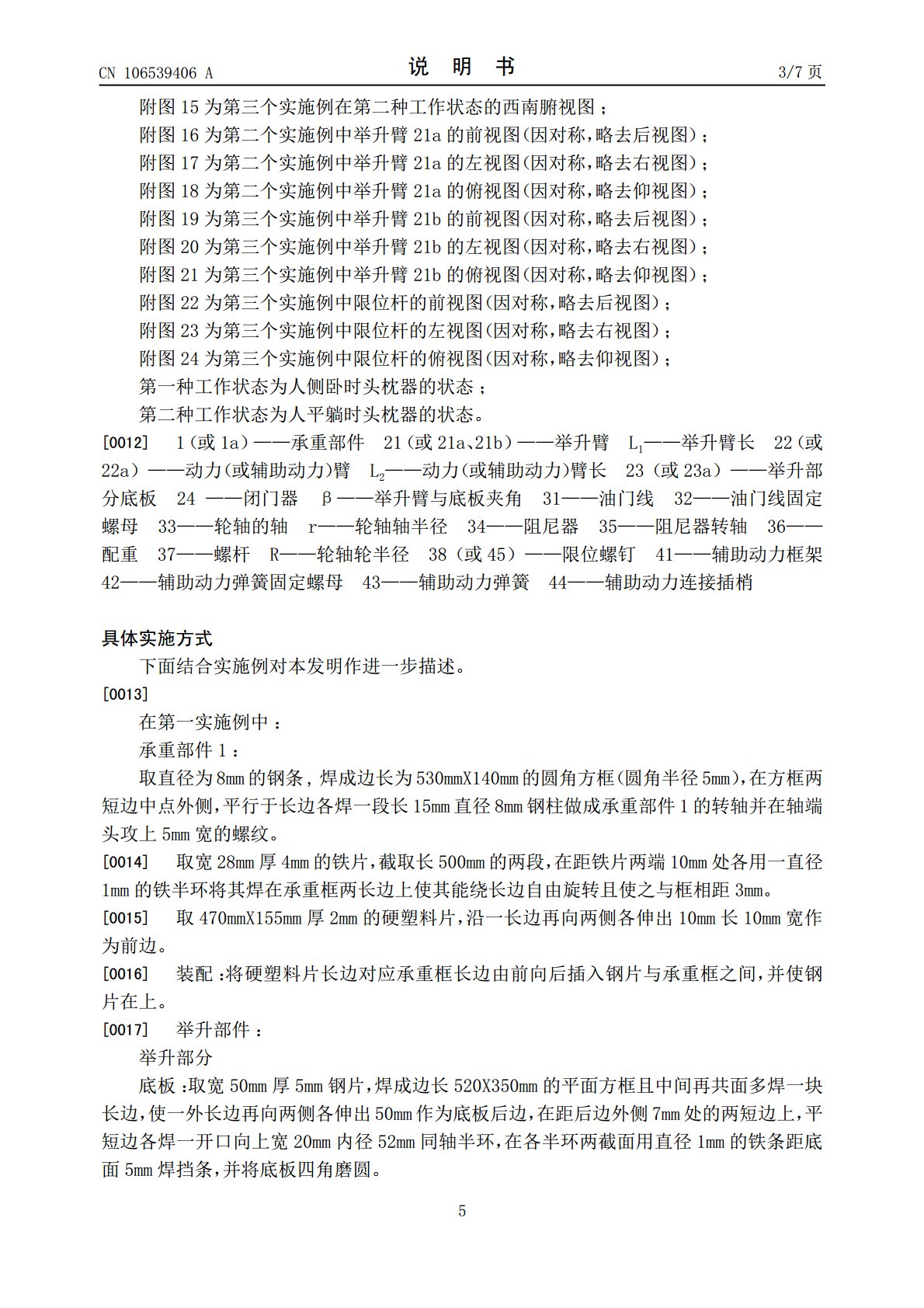
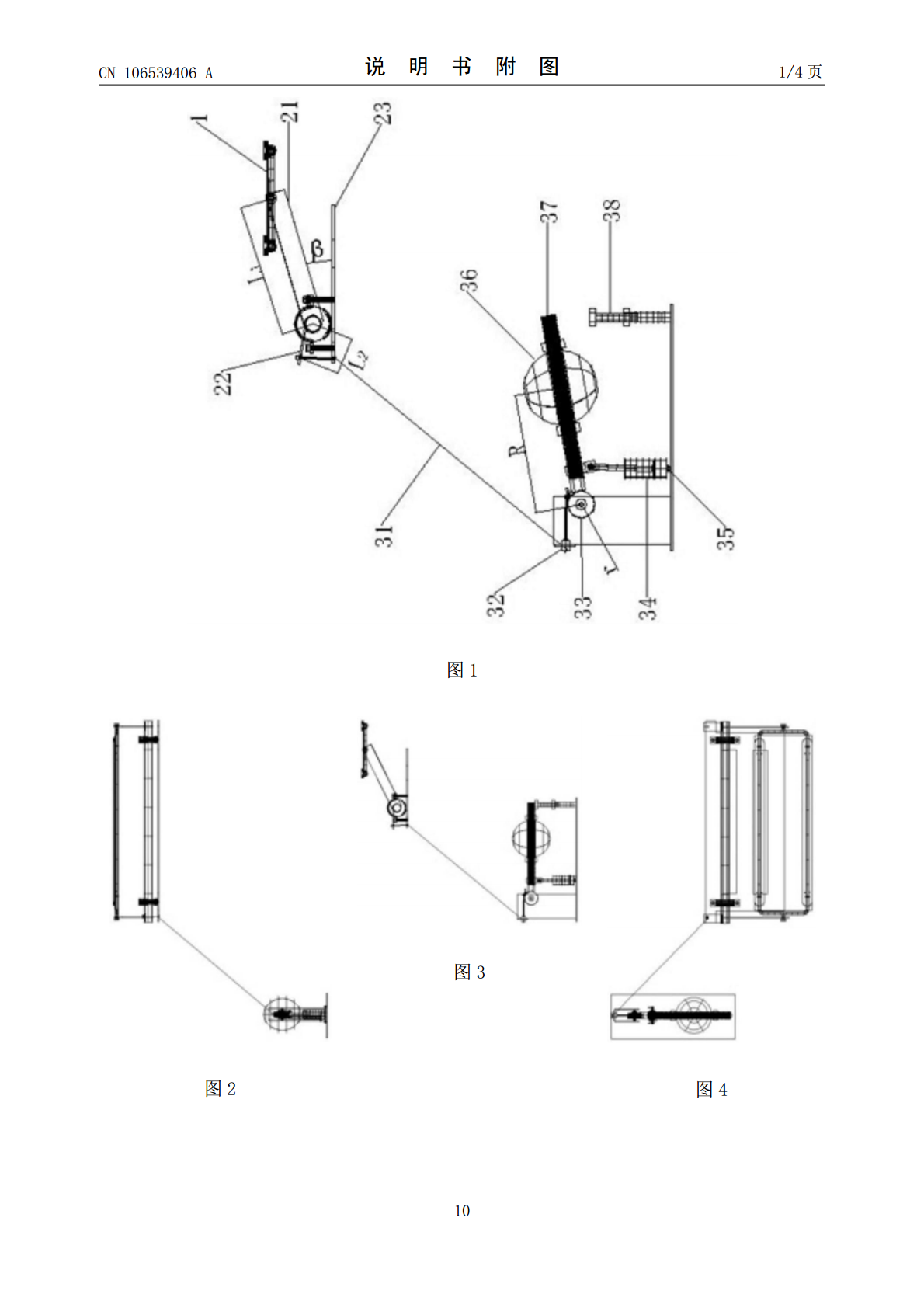
生活中,人们所使用的枕头最大的缺点就是弹性形变程度有限,不能在合适的范围内给人的头部提供足够的支撑力:当人仰卧感觉舒服时侧睡会觉得枕头过低肩膀被压得酸痛,侧卧如意后转为仰躺会感到枕头太高抵得呼吸困难。本发明公开了一种头枕器,它利用机械的动作,让人在就寝时不论处于何种体位,都能在一定范围内自动改变高度并给人的头部提供一个大小基本不变的向上托力。为达以上目的,本发明采用了以下技术方案:头枕器包括承重部件和举升部件,承重部件安置在举升部件之上,承重部件由一个以上的面构成,举升部件由举升部分和动力部分构成。

用于头枕的保持器.pdf
本发明涉及头枕保持器,其包括限定在其本体部分中的两个张力部件以及头部部分。均包括突出部分的两个张力部件沿着本体部分的纵向方向彼此间隔开,同时处于相互面对的关系,使得插入在头枕保持器中的头枕支撑物保持在两个突出部分之间而不能够摇晃。另外,这两个张力部件与座椅框架的头部部分或支承支架形成三个支承点。也就是,插入在支承支架中的头枕保持器被保持而不能摇晃,原因是两个突出部分以及头枕保持器的颈部部分紧密接触支承支架。另外,插入在头枕保持器中的头枕支撑物被保持而不能摇晃,原因是两个突出部分以及头枕保持器的颈部部分紧密
头枕角度调节器.pdf
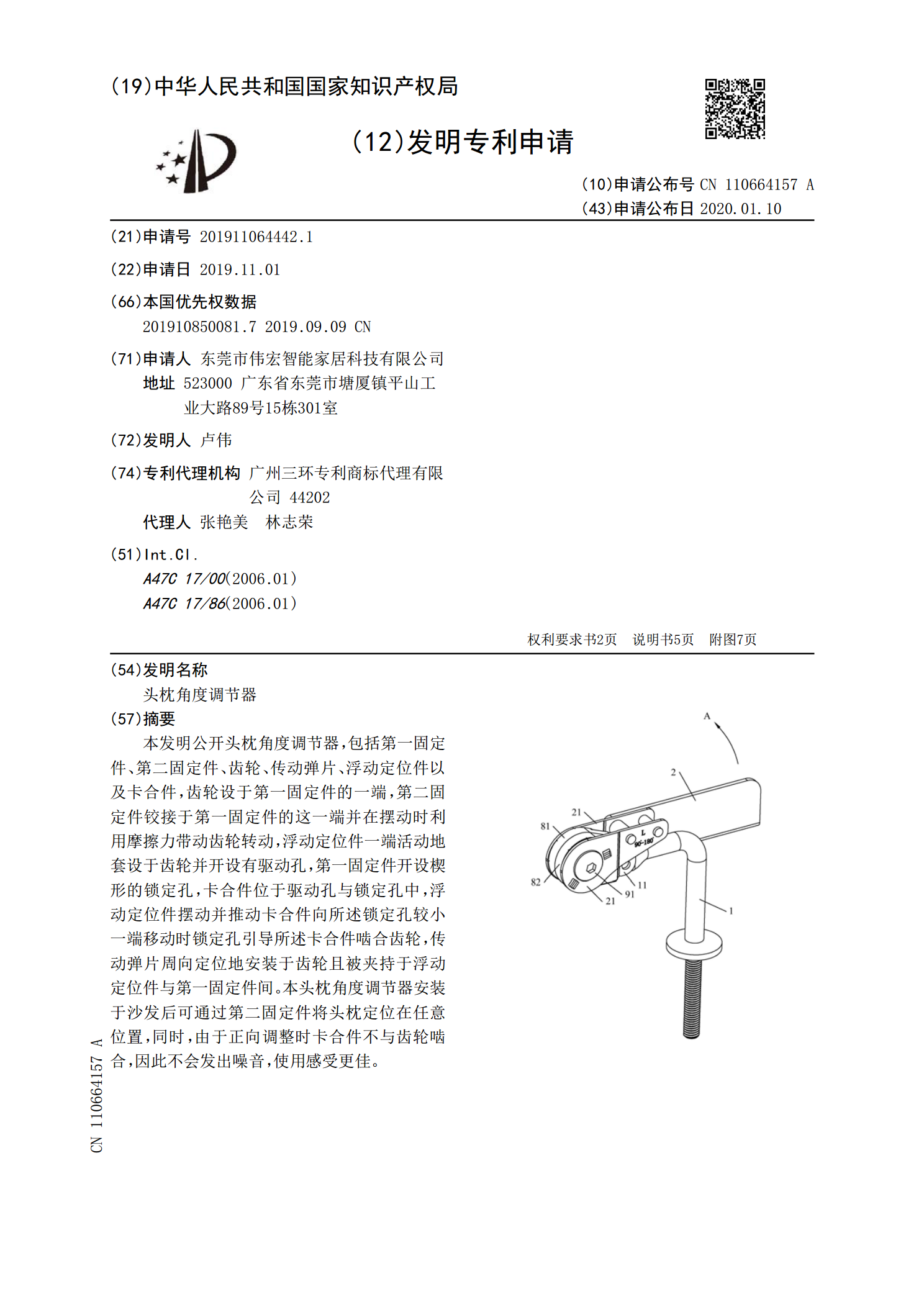
本发明公开头枕角度调节器,包括第一固定件、第二固定件、齿轮、传动弹片、浮动定位件以及卡合件,齿轮设于第一固定件的一端,第二固定件铰接于第一固定件的这一端并在摆动时利用摩擦力带动齿轮转动,浮动定位件一端活动地套设于齿轮并开设有驱动孔,第一固定件开设楔形的锁定孔,卡合件位于驱动孔与锁定孔中,浮动定位件摆动并推动卡合件向所述锁定孔较小一端移动时锁定孔引导所述卡合件啮合齿轮,传动弹片周向定位地安装于齿轮且被夹持于浮动定位件与第一固定件间。本头枕角度调节器安装于沙发后可通过第二固定件将头枕定位在任意位置,同时,由于

具有多致动器能力的头枕.pdf
一种具有多致动器能力的车辆头枕,包括头枕支撑件和安装到头枕支撑件的多凸轮释放机构。多凸轮释放机构包括第一凸轮和第二凸轮。头枕壳构件通过多凸轮释放机构枢转地安装到头枕支撑件。致动器安装到头枕壳构件。致动器包括第一致动器部分和第二致动器部分,第一致动器部分可操作以基于第一输入脱离多凸轮释放机构,第二致动器部分可操作以基于不同于第一输入的第二输入脱离多凸轮释放机构,从而允许具有多致动器能力的车辆头枕在展开配置和折叠配置之间转换。
头枕支杆、头枕及其制造方法.pdf
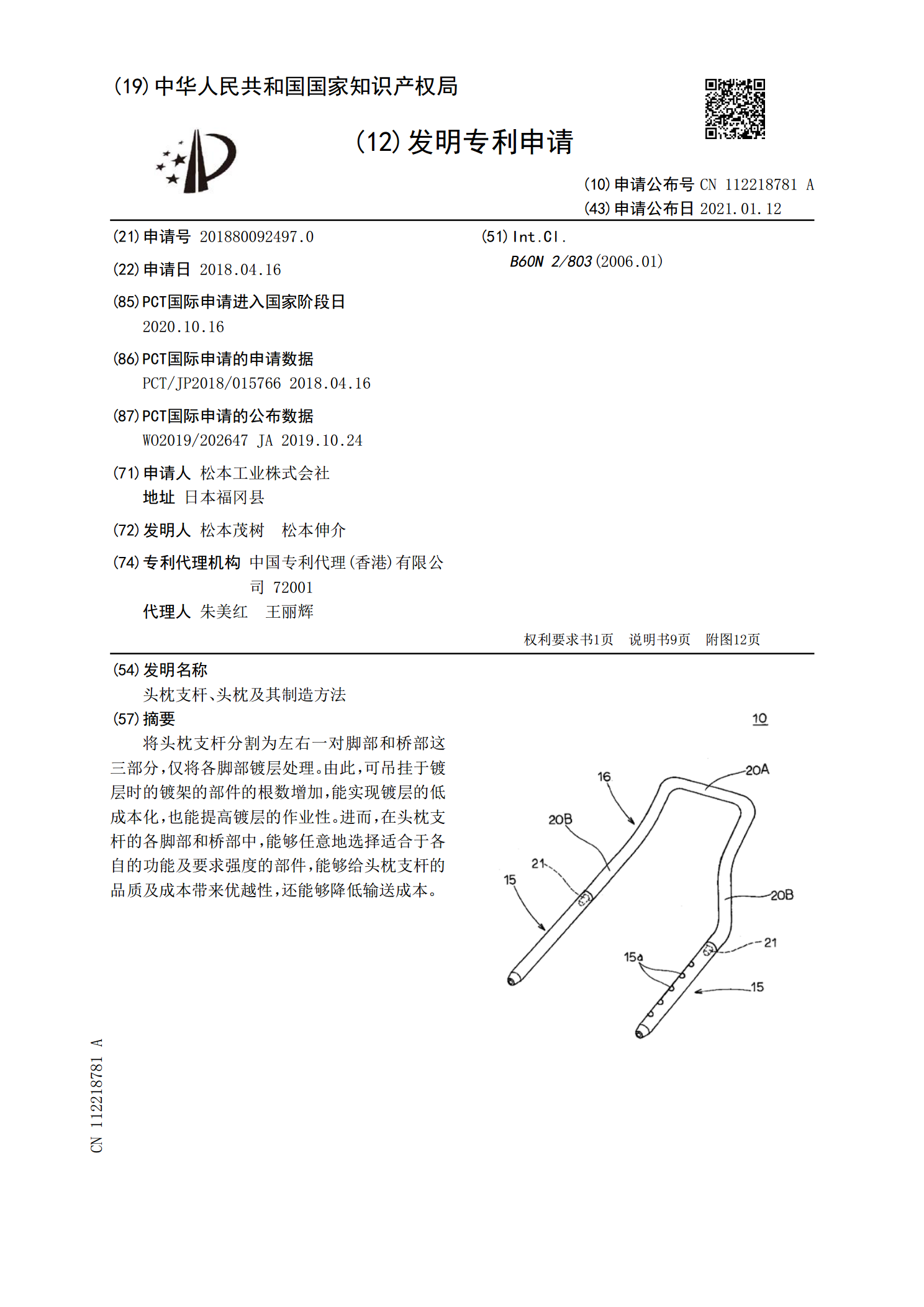
将头枕支杆分割为左右一对脚部和桥部这三部分,仅将各脚部镀层处理。由此,可吊挂于镀层时的镀架的部件的根数增加,能实现镀层的低成本化,也能提高镀层的作业性。进而,在头枕支杆的各脚部和桥部中,能够任意地选择适合于各自的功能及要求强度的部件,能够给头枕支杆的品质及成本带来优越性,还能够降低输送成本。