
一种用于多支腿支撑系统支撑反力控制装置及方法.pdf

猫巷****忠娟

1/8
2/8
3/8

4/8

5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

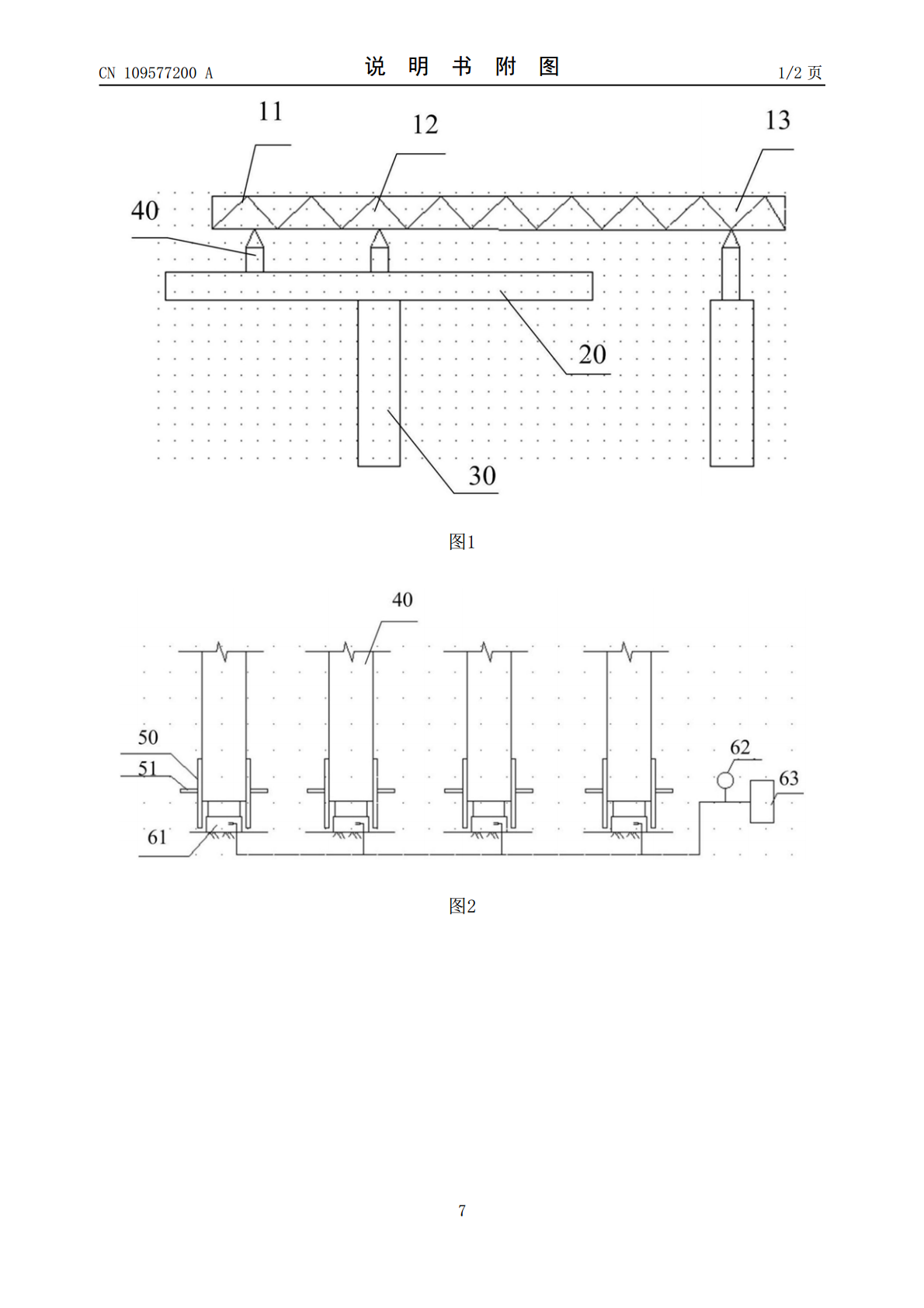
一种用于多支腿支撑系统支撑反力控制装置及方法.pdf
本发明提供了一种用于多支腿支撑系统支撑反力控制装置及方法,属于桥梁和大跨空间结构施工支撑技术领域,目的在于实现准确控制悬臂拼装架桥机空载状态下前支腿的反力。它通过对悬臂端设置的前支腿支撑下方设置螺旋套管并配套设置液压千斤顶,在液压千斤顶油管的总管上设置压力控制阀,通过调整液压活塞内的液体量来控制总支撑力,前支腿支撑反力调整完成后,通过向下旋转螺旋套管,使得螺旋套管支撑于桥梁拼接节段的上表面上,进行受力体系转换。从而,通过液压联通的原理,实现支腿各支撑反力均衡的目的。
支腿装置以及支撑底座.pdf
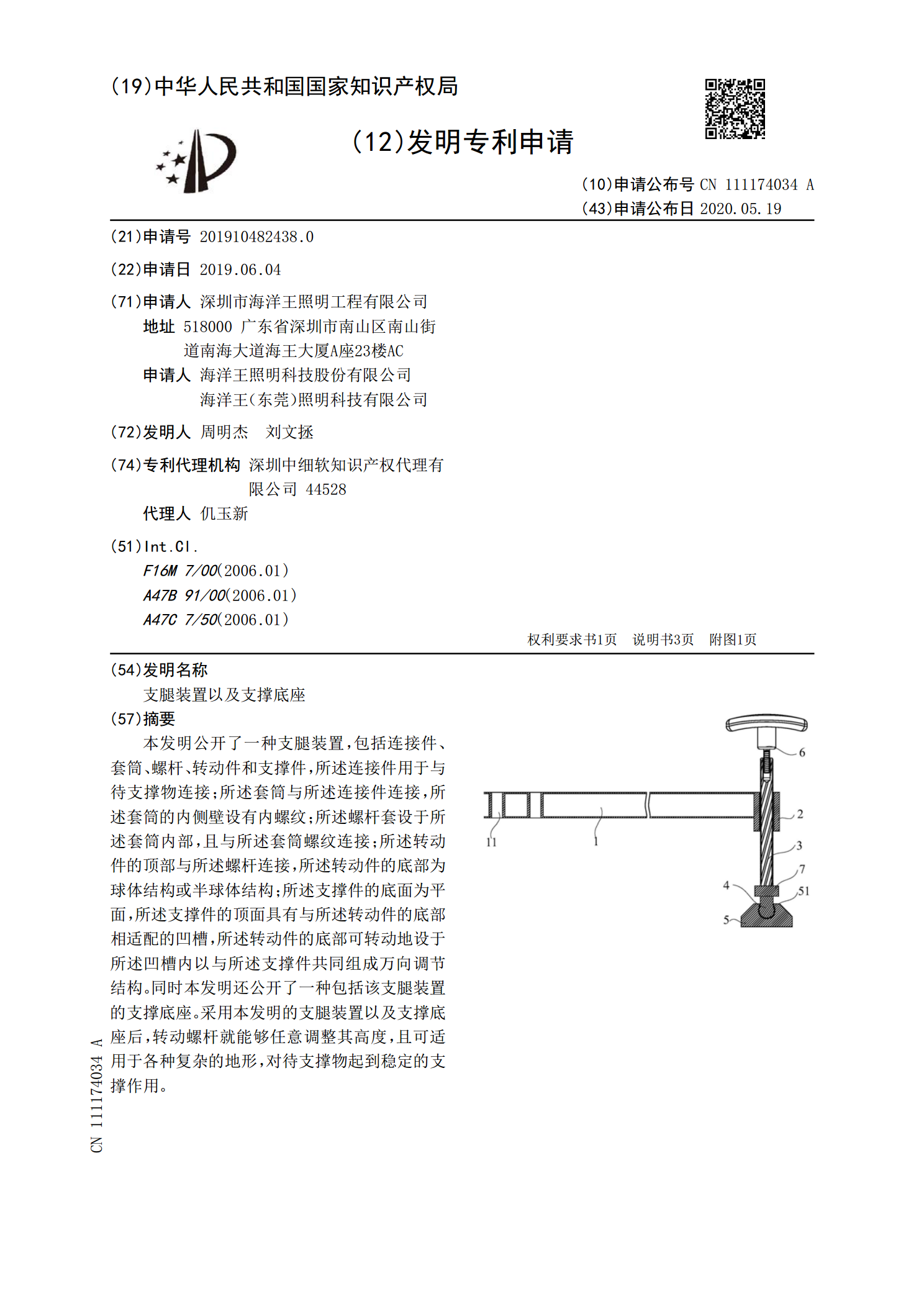
本发明公开了一种支腿装置,包括连接件、套筒、螺杆、转动件和支撑件,所述连接件用于与待支撑物连接;所述套筒与所述连接件连接,所述套筒的内侧壁设有内螺纹;所述螺杆套设于所述套筒内部,且与所述套筒螺纹连接;所述转动件的顶部与所述螺杆连接,所述转动件的底部为球体结构或半球体结构;所述支撑件的底面为平面,所述支撑件的顶面具有与所述转动件的底部相适配的凹槽,所述转动件的底部可转动地设于所述凹槽内以与所述支撑件共同组成万向调节结构。同时本发明还公开了一种包括该支腿装置的支撑底座。采用本发明的支腿装置以及支撑底座后,转动
用于在挖掘支撑系统的挡土结构中支撑支腿的方法,以及用于该方法目的的元件系统.pdf
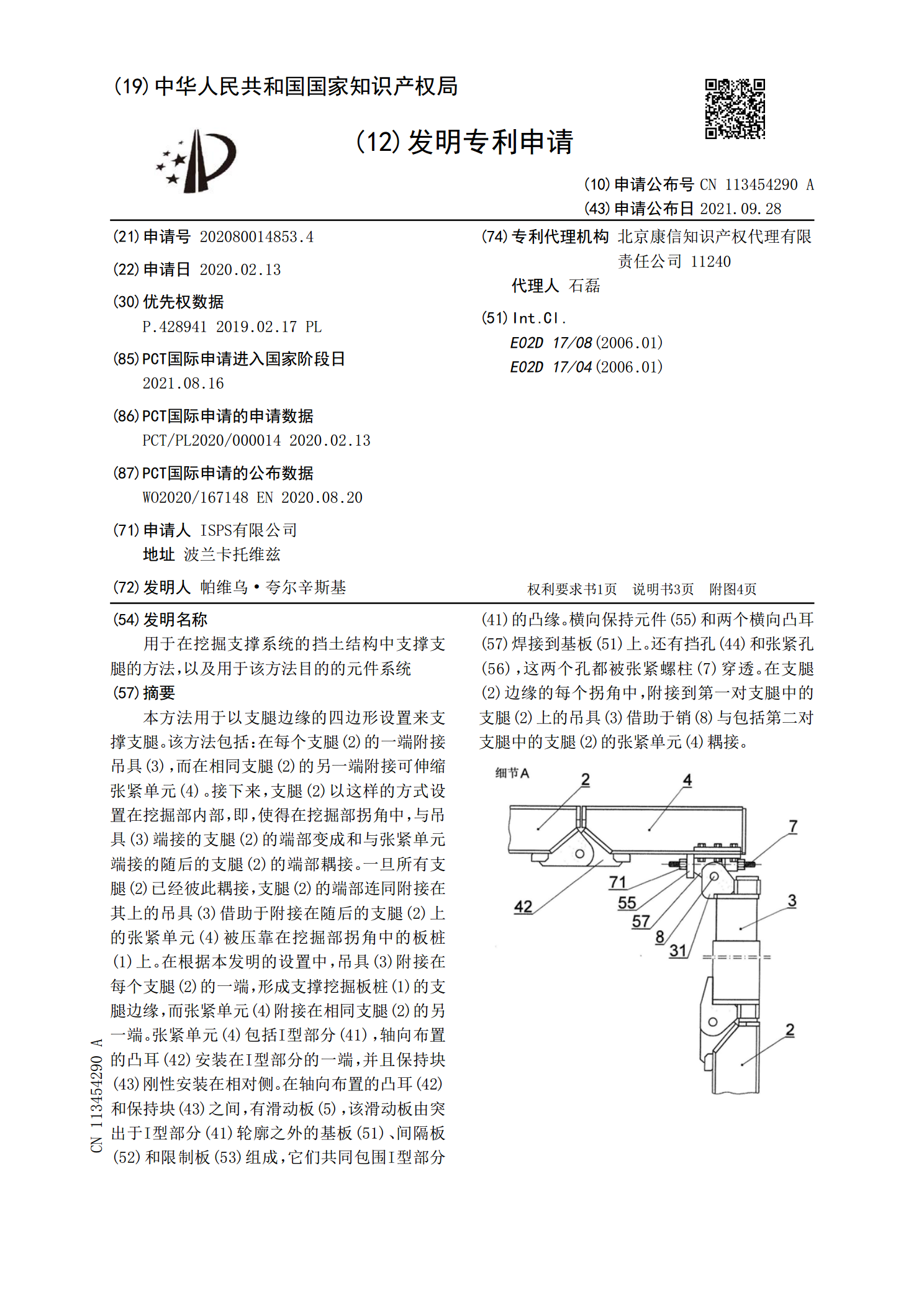
本方法用于以支腿边缘的四边形设置来支撑支腿。该方法包括:在每个支腿(2)的一端附接吊具(3),而在相同支腿(2)的另一端附接可伸缩张紧单元(4)。接下来,支腿(2)以这样的方式设置在挖掘部内部,即,使得在挖掘部拐角中,与吊具(3)端接的支腿(2)的端部变成和与张紧单元端接的随后的支腿(2)的端部耦接。一旦所有支腿(2)已经彼此耦接,支腿(2)的端部连同附接在其上的吊具(3)借助于附接在随后的支腿(2)上的张紧单元(4)被压靠在挖掘部拐角中的板桩(1)上。在根据本发明的设置中,吊具(3)附接在每个支腿(2)

一种用于油罐清洗设备的支腿、旋转装置和支撑装置.pdf
本发明涉及油罐清洗技术领域,公开了一种用于油罐清洗设备的支腿、旋转装置和支撑装置,支腿包括底座、伸缩动力装置、支撑杆、万向轮和支脚;支撑杆一端与底座铰接,伸缩动力装置的固定端与底座铰接,伸缩动力装置的伸缩端与支撑杆铰接,支脚和万向轮分别安装在支撑杆上,支脚和伸缩动力装置的伸缩端在支撑杆上对立设置,万向轮在支脚和伸缩动力装置的伸缩端之间,旋转装置包括两个支腿,支撑装装置包括两个旋转装置,使用时通过伸缩动力装置调整两个支退之间的夹角可以满足不同情况下的清洗稳定性需求,另外当定点清洗时,先通过旋转动力装置带动支
支腿伸缩系统、液压系统、支撑装置及工程机械.pdf
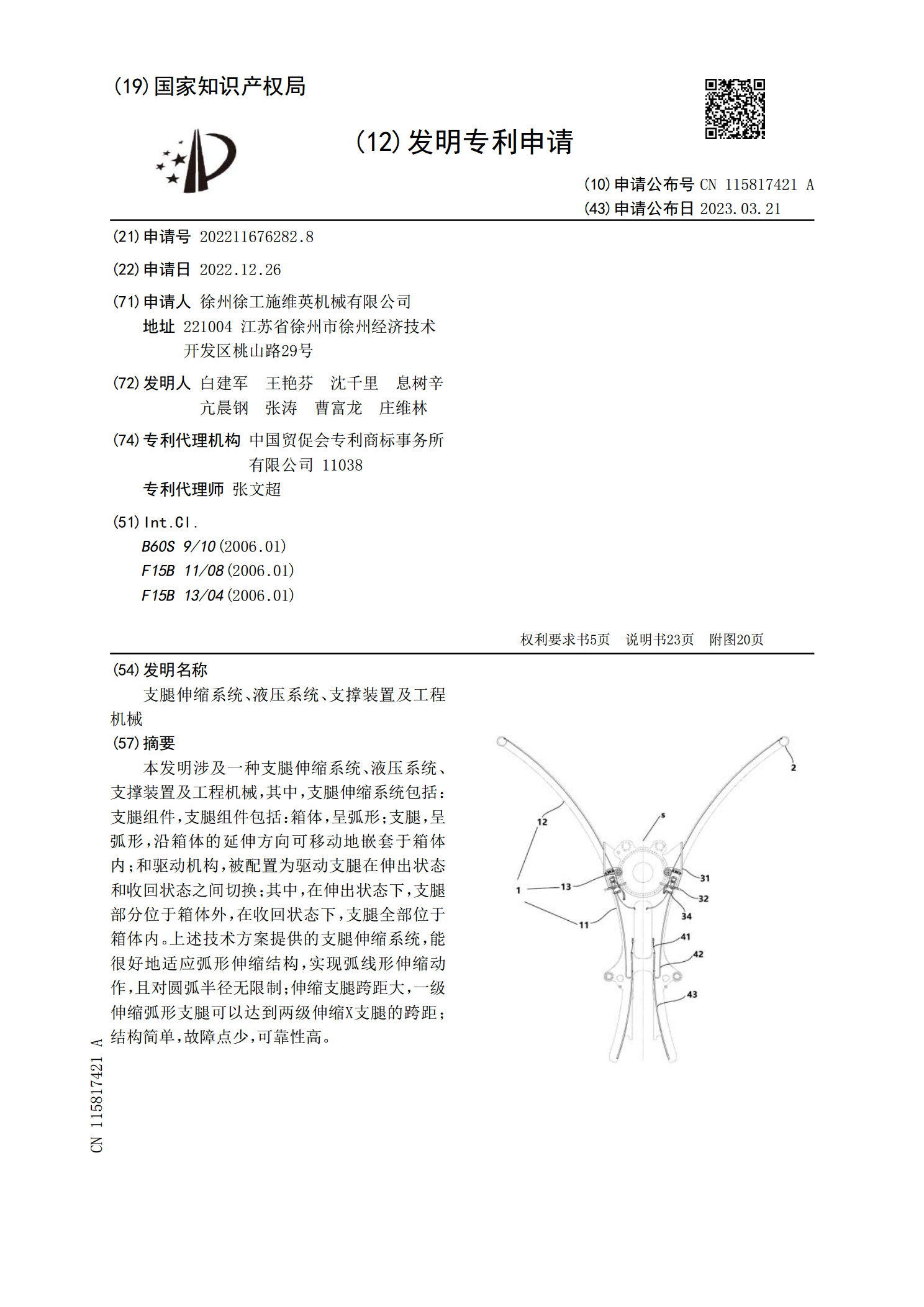
本发明涉及一种支腿伸缩系统、液压系统、支撑装置及工程机械,其中,支腿伸缩系统包括:支腿组件,支腿组件包括:箱体,呈弧形;支腿,呈弧形,沿箱体的延伸方向可移动地嵌套于箱体内;和驱动机构,被配置为驱动支腿在伸出状态和收回状态之间切换;其中,在伸出状态下,支腿部分位于箱体外,在收回状态下,支腿全部位于箱体内。上述技术方案提供的支腿伸缩系统,能很好地适应弧形伸缩结构,实现弧线形伸缩动作,且对圆弧半径无限制;伸缩支腿跨距大,一级伸缩弧形支腿可以达到两级伸缩X支腿的跨距;结构简单,故障点少,可靠性高。