
一种用于油罐清洗设备的支腿、旋转装置和支撑装置.pdf

Ja****44

1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于油罐清洗设备的支腿、旋转装置和支撑装置.pdf
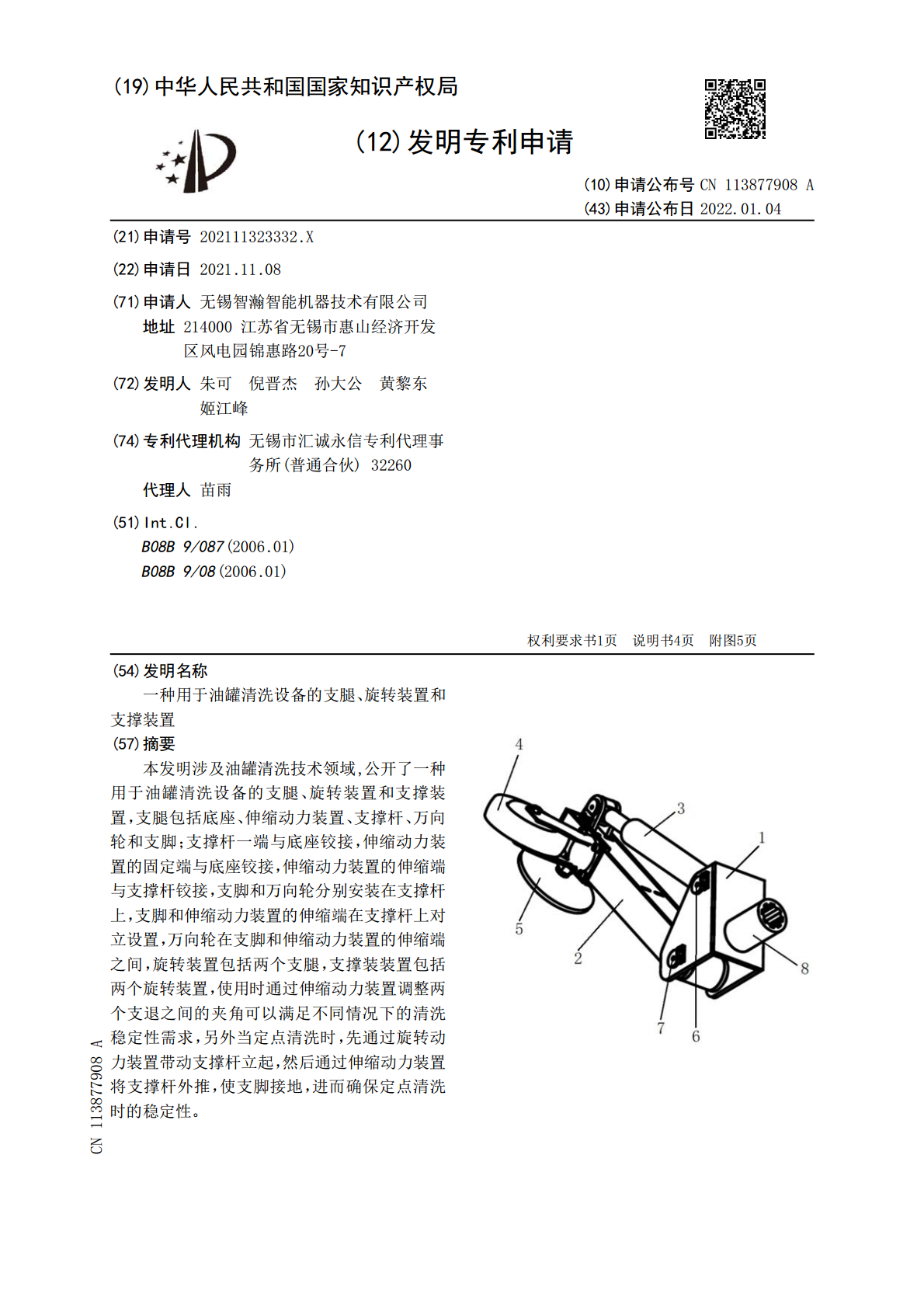
本发明涉及油罐清洗技术领域,公开了一种用于油罐清洗设备的支腿、旋转装置和支撑装置,支腿包括底座、伸缩动力装置、支撑杆、万向轮和支脚;支撑杆一端与底座铰接,伸缩动力装置的固定端与底座铰接,伸缩动力装置的伸缩端与支撑杆铰接,支脚和万向轮分别安装在支撑杆上,支脚和伸缩动力装置的伸缩端在支撑杆上对立设置,万向轮在支脚和伸缩动力装置的伸缩端之间,旋转装置包括两个支腿,支撑装装置包括两个旋转装置,使用时通过伸缩动力装置调整两个支退之间的夹角可以满足不同情况下的清洗稳定性需求,另外当定点清洗时,先通过旋转动力装置带动支

用于光伏组件的支腿、支撑装置和光伏电站.pdf
本发明公开一种用于光伏组件的支腿,包括底撑和连接件;连接件固定于底撑的顶部,且连接件用于安装光伏组件;连接件在底撑上的固定位置可调,和/或连接件上用于与底撑固定连接的位置可调。应用时,利用上述支腿支撑光伏组件的上端或下端,先根据光伏组件的宽度调节支腿中连接件和底撑的相对位置,再使连接件与底撑固定连接,能确保连接件处于所安装光伏组件上端或下端处的恰当位置,确保光伏组件的上端或下端能够安装至该支腿的连接件,能适于安装多种宽度尺寸的光伏组件,通用性强,避免增加光伏电站的建设成本。本发明还提供分别应用上述支腿的支

一种家具支腿用清洗装置.pdf
本发明涉及一种清洗装置,尤其涉及一种家具支腿用清洗装置。提供一种无需人工擦拭,可将家具支腿表面全部清洗干净的家具支腿用清洗装置。一种家具支腿用清洗装置,包括有:底座,底座底部一侧对称转动式设有万向轮;直向轮,底座底部另一侧对称转动式设有直向轮;转动机构,底座顶部设有转动机构;洗刷机构,转动机构上设有洗刷机构。通过设置的合盖机构可将家具支腿进行固定,避免其脱离放置板,从而无需人工再次拾起家具支腿放在放置板上;通过设置的导流板可避免污水直接流在缺锥齿轮和全锥齿轮上,可避免其生锈,降低使用成本。
支腿装置以及支撑底座.pdf
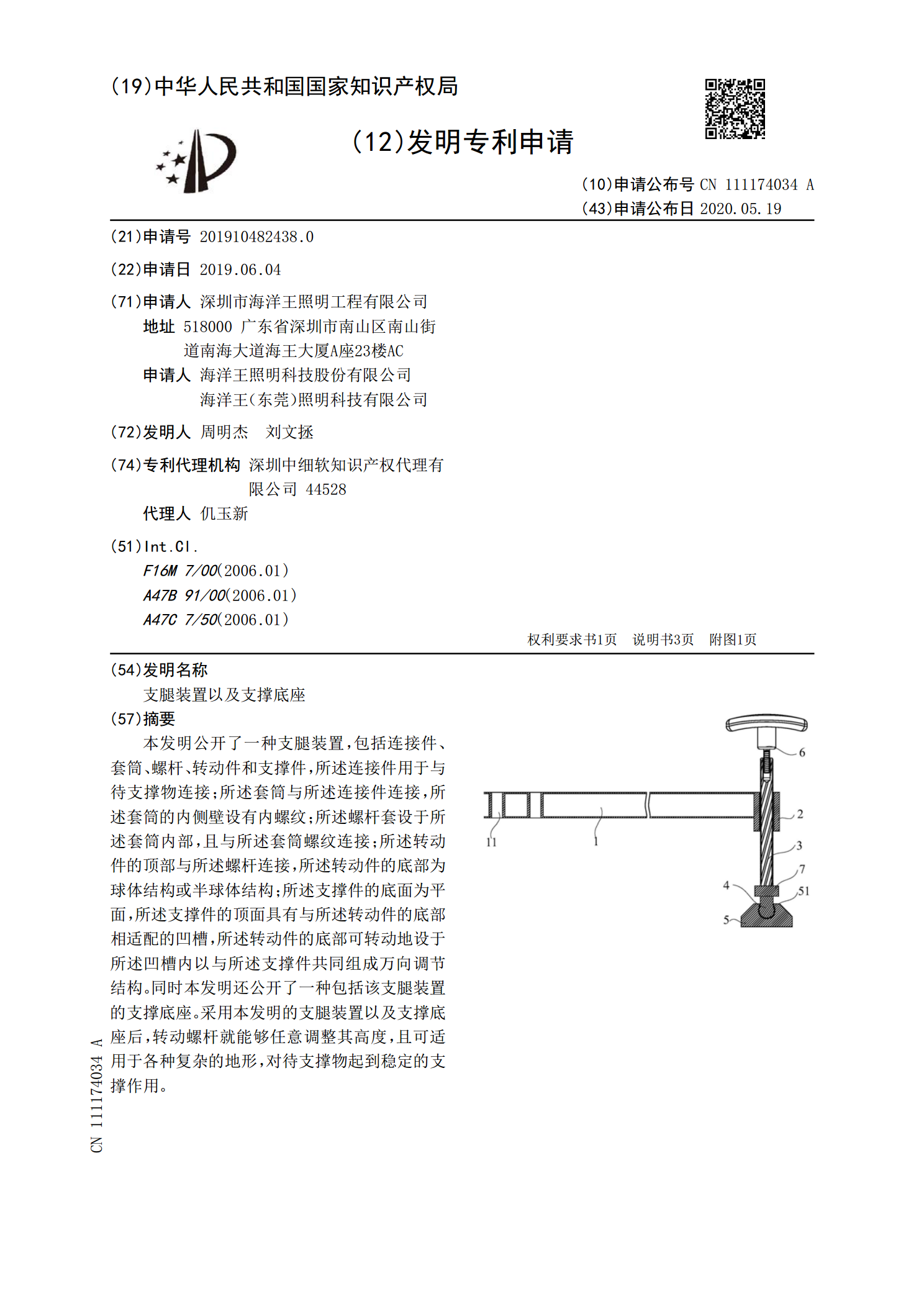
本发明公开了一种支腿装置,包括连接件、套筒、螺杆、转动件和支撑件,所述连接件用于与待支撑物连接;所述套筒与所述连接件连接,所述套筒的内侧壁设有内螺纹;所述螺杆套设于所述套筒内部,且与所述套筒螺纹连接;所述转动件的顶部与所述螺杆连接,所述转动件的底部为球体结构或半球体结构;所述支撑件的底面为平面,所述支撑件的顶面具有与所述转动件的底部相适配的凹槽,所述转动件的底部可转动地设于所述凹槽内以与所述支撑件共同组成万向调节结构。同时本发明还公开了一种包括该支腿装置的支撑底座。采用本发明的支腿装置以及支撑底座后,转动

一种用于多支腿支撑系统支撑反力控制装置及方法.pdf
本发明提供了一种用于多支腿支撑系统支撑反力控制装置及方法,属于桥梁和大跨空间结构施工支撑技术领域,目的在于实现准确控制悬臂拼装架桥机空载状态下前支腿的反力。它通过对悬臂端设置的前支腿支撑下方设置螺旋套管并配套设置液压千斤顶,在液压千斤顶油管的总管上设置压力控制阀,通过调整液压活塞内的液体量来控制总支撑力,前支腿支撑反力调整完成后,通过向下旋转螺旋套管,使得螺旋套管支撑于桥梁拼接节段的上表面上,进行受力体系转换。从而,通过液压联通的原理,实现支腿各支撑反力均衡的目的。