
轨道行走装置及轨道行走系统.pdf

猫巷****傲柏


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轨道行走装置及轨道行走系统.pdf
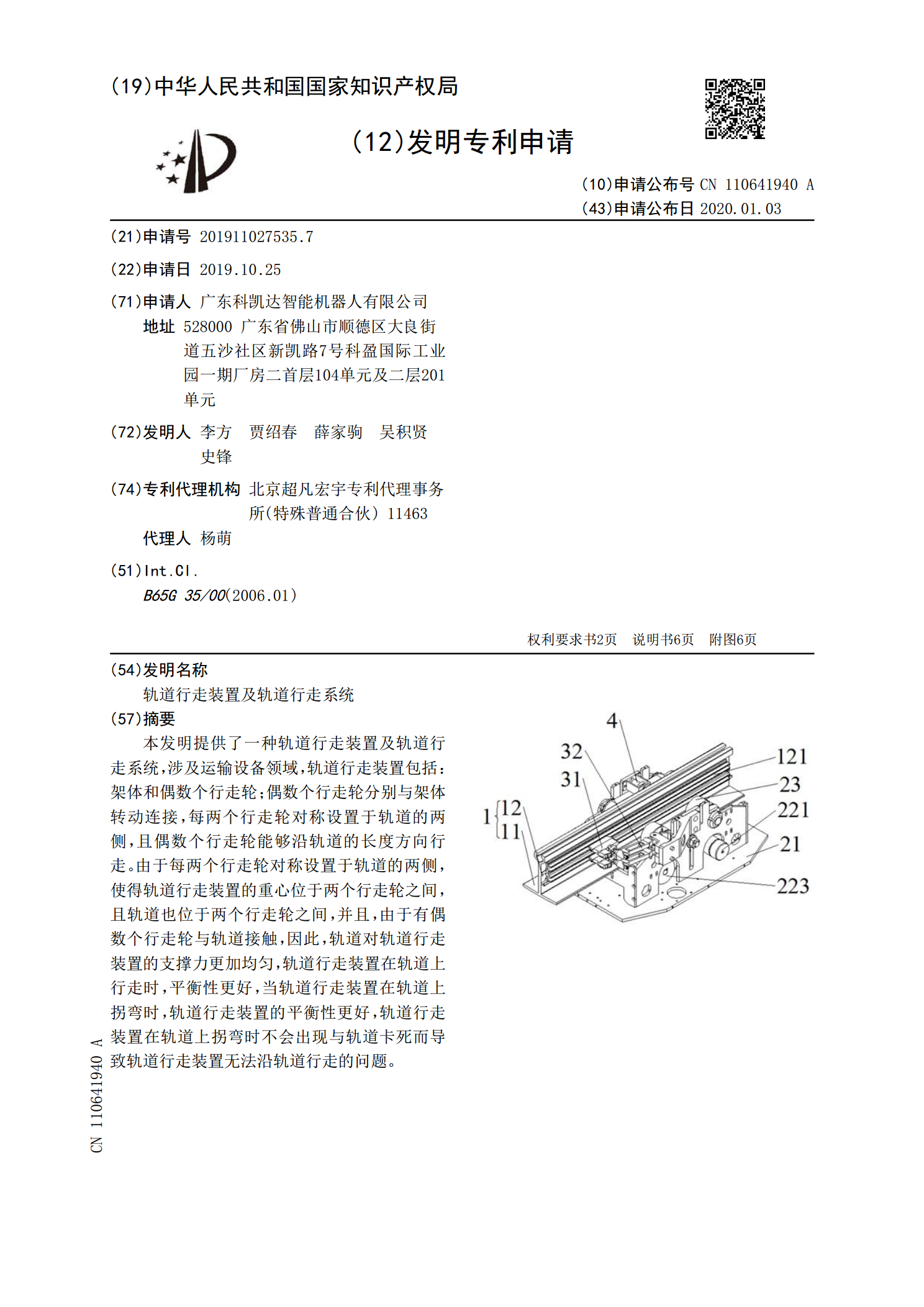
本发明提供了一种轨道行走装置及轨道行走系统,涉及运输设备领域,轨道行走装置包括:架体和偶数个行走轮;偶数个行走轮分别与架体转动连接,每两个行走轮对称设置于轨道的两侧,且偶数个行走轮能够沿轨道的长度方向行走。由于每两个行走轮对称设置于轨道的两侧,使得轨道行走装置的重心位于两个行走轮之间,且轨道也位于两个行走轮之间,并且,由于有偶数个行走轮与轨道接触,因此,轨道对轨道行走装置的支撑力更加均匀,轨道行走装置在轨道上行走时,平衡性更好,当轨道行走装置在轨道上拐弯时,轨道行走装置的平衡性更好,轨道行走装置在轨道上拐

轨道行走装置.pdf
本发明涉及一种轨道行走装置,包括车体(20)、连接装置(40)和两组车轮(30),两组车轮(30)分别设置在车体(20)的两侧,车轮(30)设有轮边(31),连接装置(40)的一端连接在车体(20)的底部,连接装置(40)的另一端与车轮(30)连接,连接装置(40)包括弹性件(41),弹性件(41)在车体(20)的重力作用下发生变形以使两组车轮(30)的轮边(31)与轨道(10)的侧面贴紧。本发明轨道行走装置在车体的重力作用下,可使车轮的轮边与轨道的侧面相互贴紧,防止车体发生左右晃动;同时,连接装置包括弹

一种轨道行走轮以及轨道行走装置.pdf
本发明涉及一种轨道行走轮以及轨道行走装置,其轨道行走轮包括主体部分,以及形成于所述主体部分两端的挡部,所述挡部的直径大于所述主体部分的直径,所述主体部分的直径由中间向两端逐渐减小;其轨道行走装置在于具有上述轨道行走轮。在本发明的轨道行走轮中,由于轨道行走轮的主体部分的中间部分的直径大于主体部分的两端的直径,在轨道上滚动时,只有主体部分的中间部分与轨道接触,接触面积小,滚动顺畅,对轨道的磨损小,而且噪音也比较小。
轨道行走装置及轨道机器人.pdf
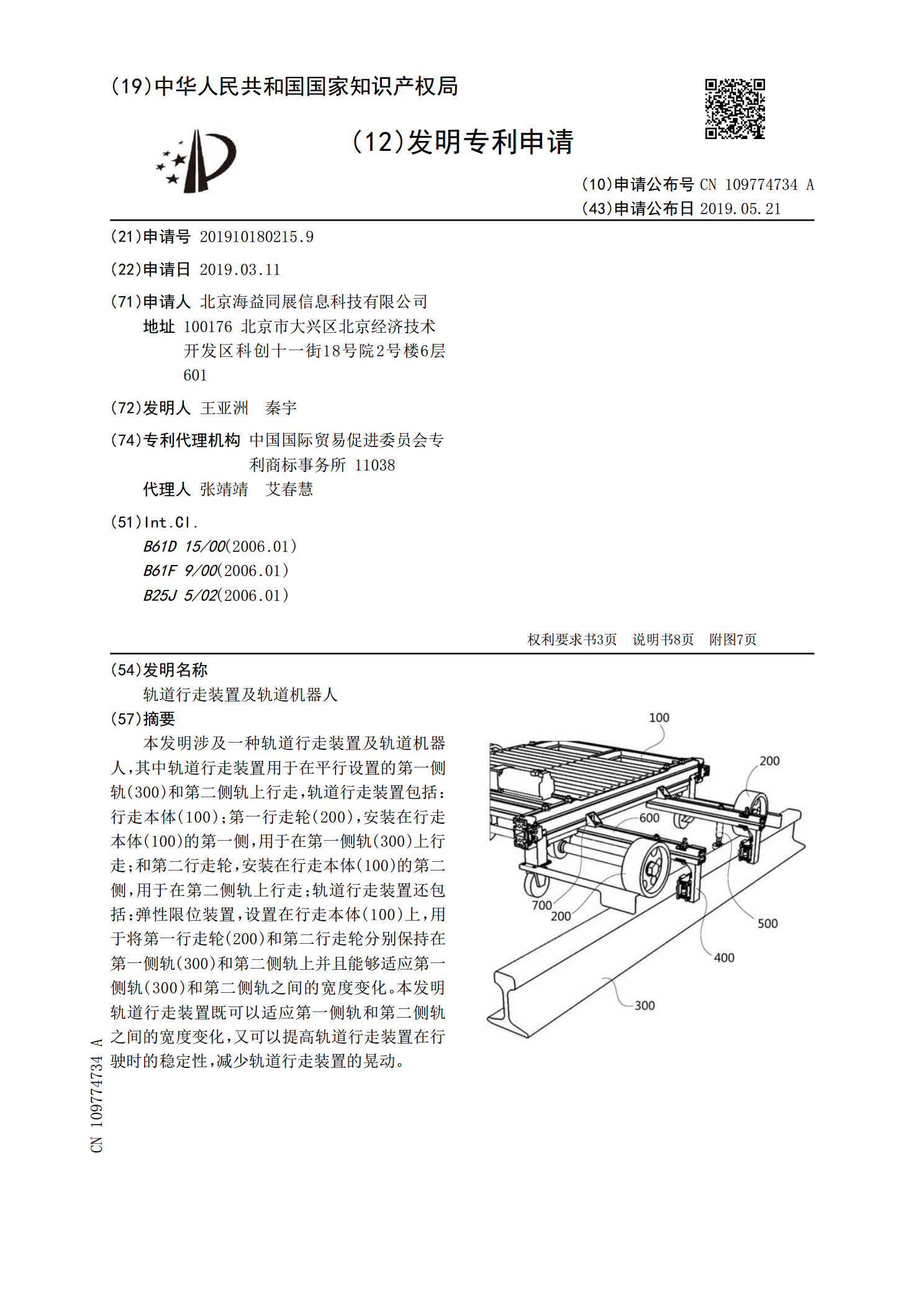
本发明涉及一种轨道行走装置及轨道机器人,其中轨道行走装置用于在平行设置的第一侧轨(300)和第二侧轨上行走,轨道行走装置包括:行走本体(100);第一行走轮(200),安装在行走本体(100)的第一侧,用于在第一侧轨(300)上行走;和第二行走轮,安装在行走本体(100)的第二侧,用于在第二侧轨上行走;轨道行走装置还包括:弹性限位装置,设置在行走本体(100)上,用于将第一行走轮(200)和第二行走轮分别保持在第一侧轨(300)和第二侧轨上并且能够适应第一侧轨(300)和第二侧轨之间的宽度变化。本发明轨道

轨道式机器人及其轨道式行走装置、系统与柔性导向机构.pdf
本发明公开了一种轨道式机器人及其轨道式行走装置、系统与柔性导向机构,本发明的柔性导向机构包括安装座和铰接于安装座上的摇臂,摇臂的两端和安装座之间均连接有第一柔性元件,摇臂上远离安装座的一端设有挂载轮、且位于挂载轮的两侧设有伸缩臂,伸缩臂的端部安装有侧导向轮;轨道式机器人及其轨道式行走装置、系统的本体上装设有至少一对前述柔性导向机构以及轨道行走驱动组件。本发明能够实现轨道式机器人在极小转弯半径的情况下平稳、快速地转向,能平稳、快速的通过极小导轨弯道,转弯过程挂载轮根据弯道半径在柔性元件的作用下能自行实时调整