
一种重载机械手.pdf

书生****66


1/10

2/10

3/10
4/10

5/10

6/10
7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种重载机械手.pdf
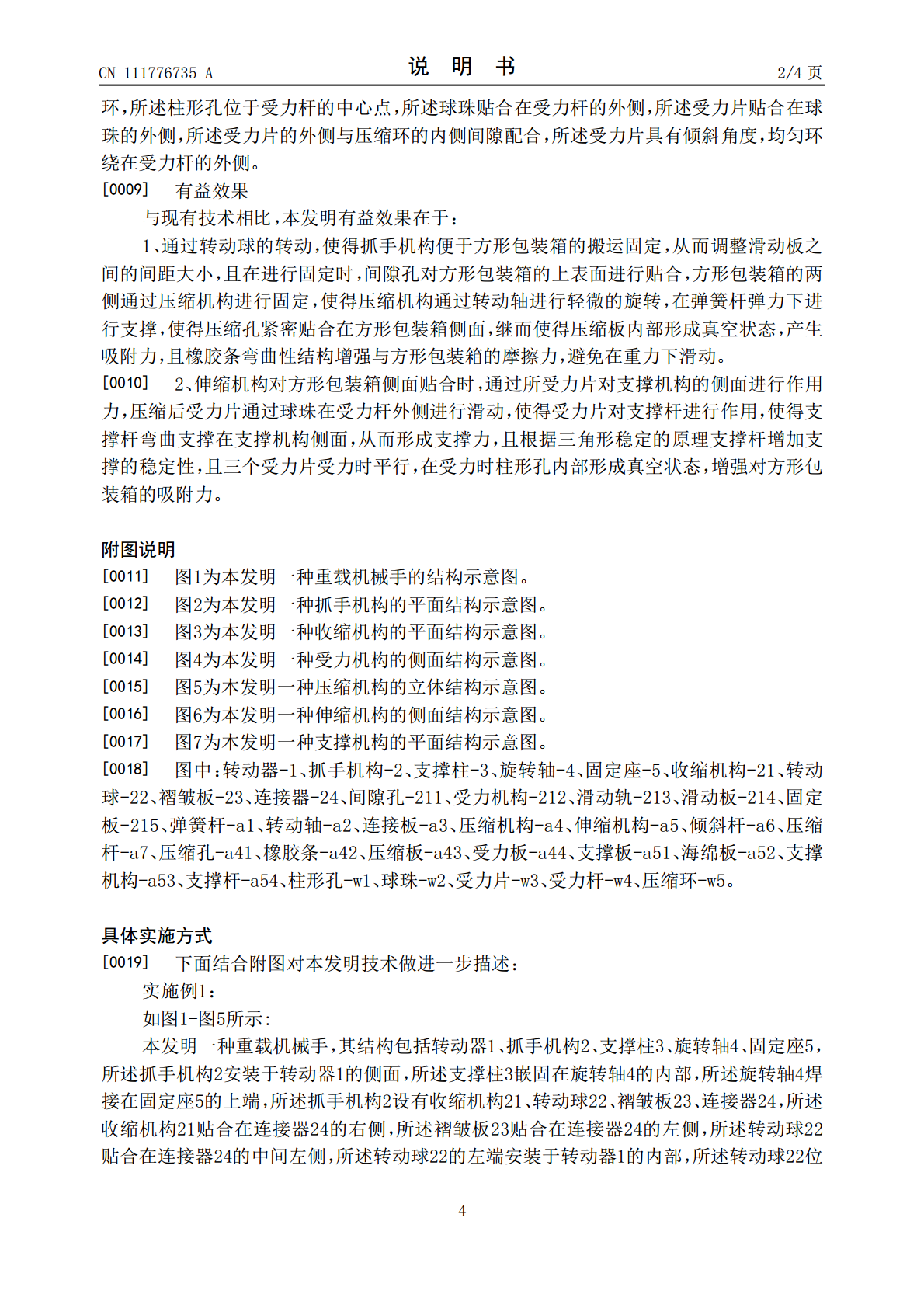
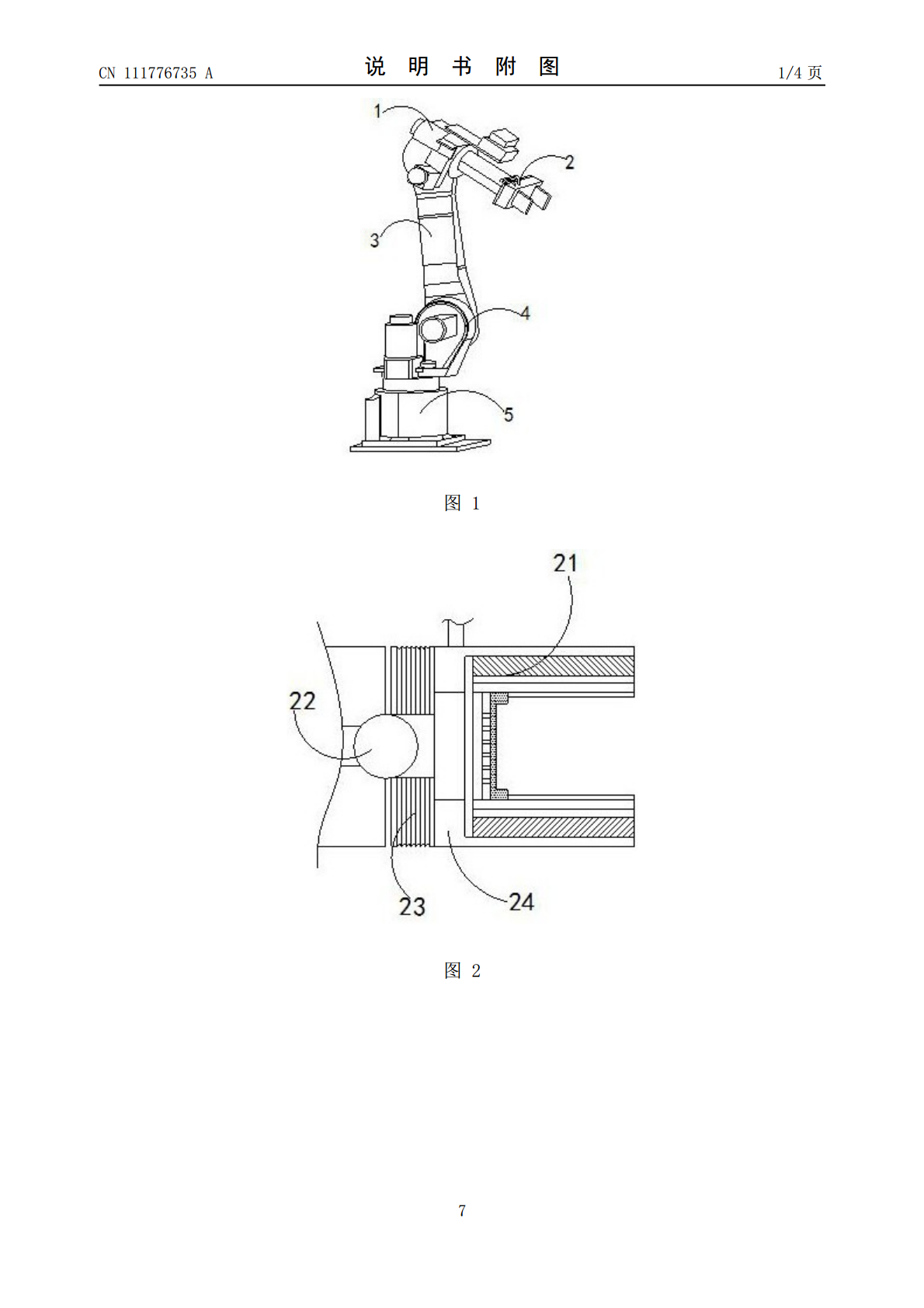
本发明公开了一种重载机械手,其结构包括转动器、抓手机构、支撑柱、旋转轴、固定座,抓手机构设有收缩机构、转动球、褶皱板、连接器,方形包装箱的两侧通过压缩机构进行固定,使得压缩机构通过转动轴进行轻微的旋转,在弹簧杆弹力下进行支撑,使得压缩孔紧密贴合在方形包装箱侧面,继而使得压缩板内部形成真空状态,产生吸附力,且橡胶条弯曲性结构增强与方形包装箱的摩擦力,避免在重力下滑动,压缩后受力片通过球珠在受力杆外侧进行滑动,使得支撑杆弯曲支撑在支撑机构侧面,从而形成支撑力,且根据三角形稳定的原理支撑杆增加支撑的稳定性,且三
智能重载机械手.pdf
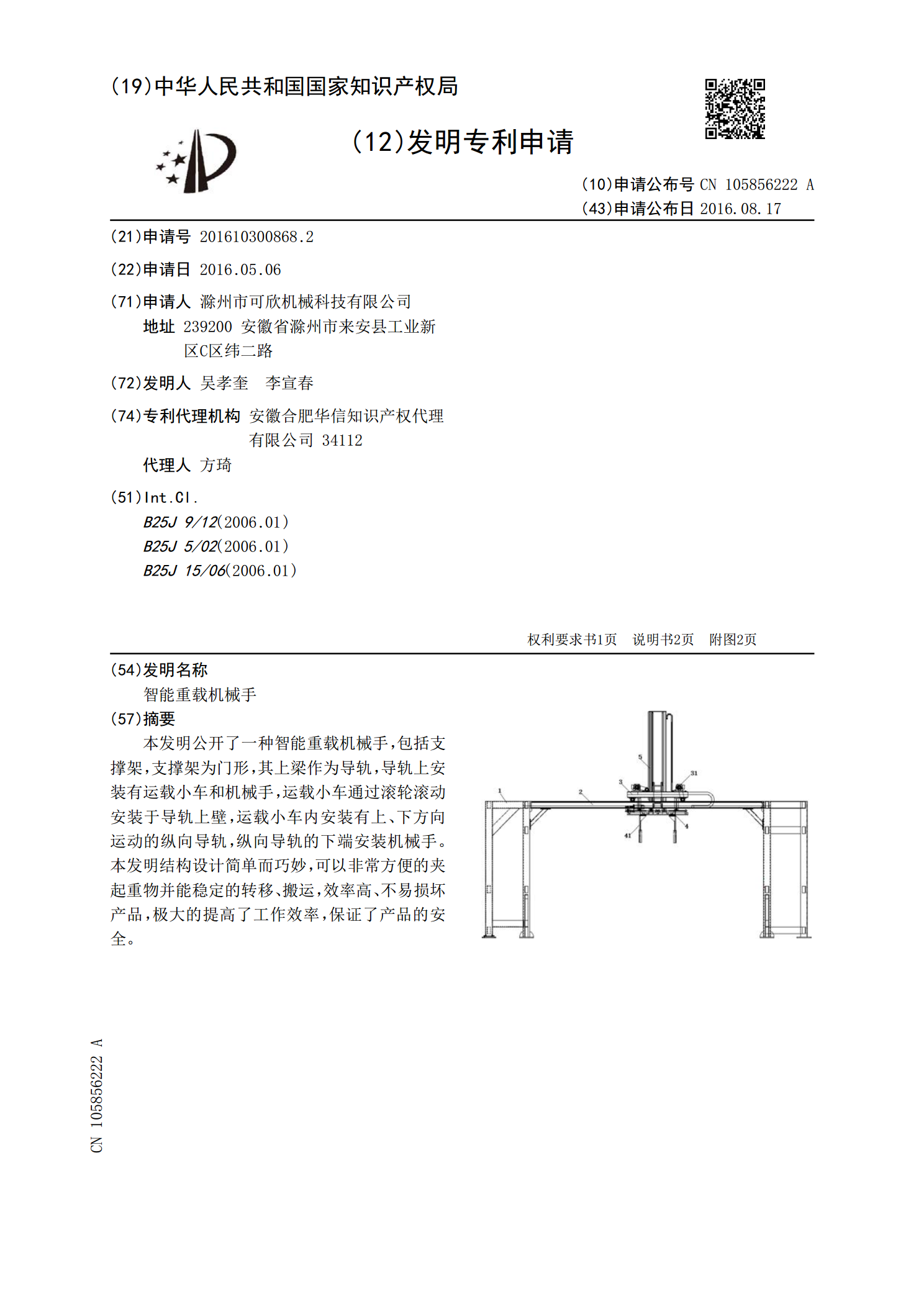
本发明公开了一种智能重载机械手,包括支撑架,支撑架为门形,其上梁作为导轨,导轨上安装有运载小车和机械手,运载小车通过滚轮滚动安装于导轨上壁,运载小车内安装有上、下方向运动的纵向导轨,纵向导轨的下端安装机械手。本发明结构设计简单而巧妙,可以非常方便的夹起重物并能稳定的转移、搬运,效率高、不易损坏产品,极大的提高了工作效率,保证了产品的安全。
一种重载机械手夹持车轮翻转机构.pdf
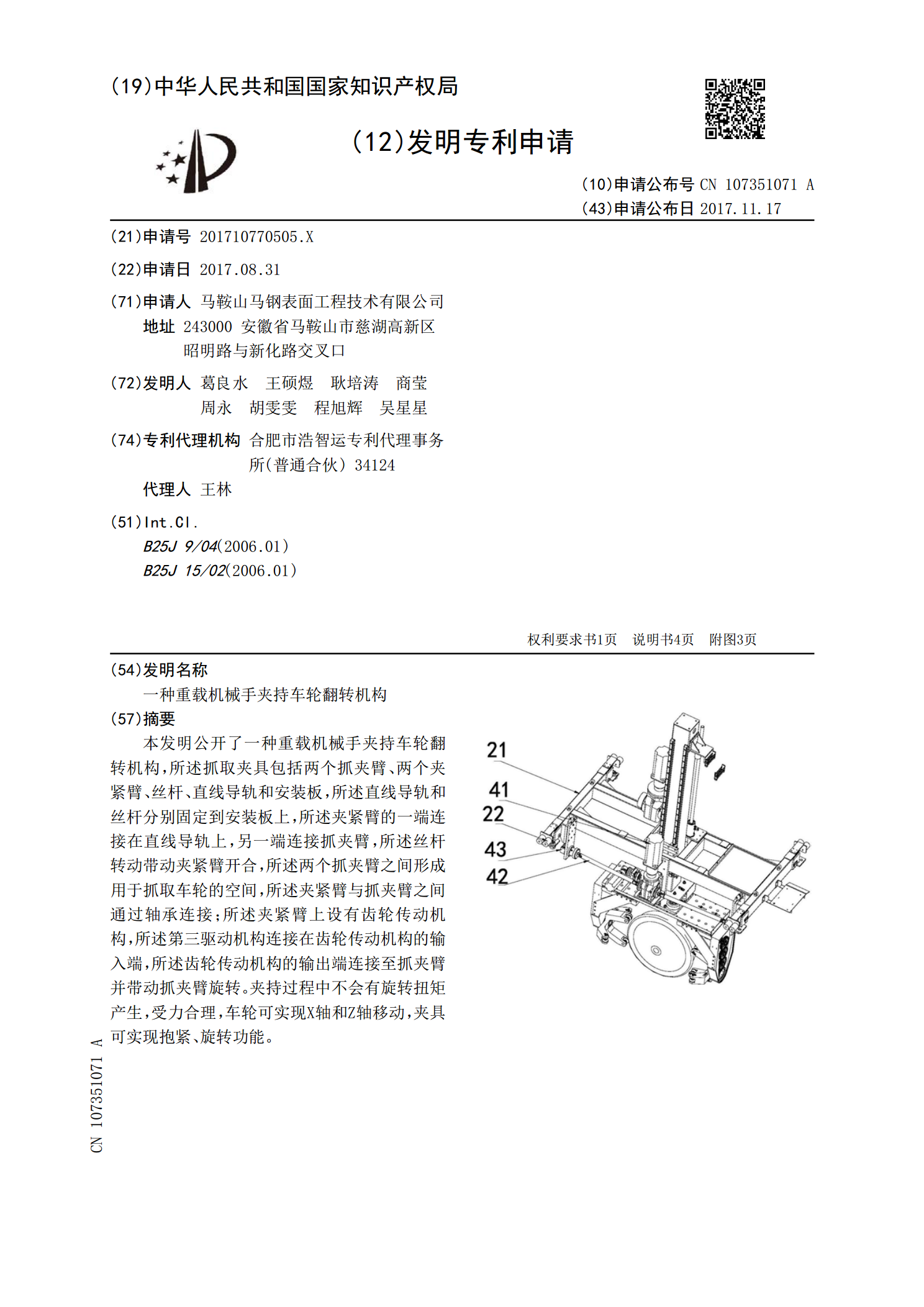
本发明公开了一种重载机械手夹持车轮翻转机构,所述抓取夹具包括两个抓夹臂、两个夹紧臂、丝杆、直线导轨和安装板,所述直线导轨和丝杆分别固定到安装板上,所述夹紧臂的一端连接在直线导轨上,另一端连接抓夹臂,所述丝杆转动带动夹紧臂开合,所述两个抓夹臂之间形成用于抓取车轮的空间,所述夹紧臂与抓夹臂之间通过轴承连接;所述夹紧臂上设有齿轮传动机构,所述第三驱动机构连接在齿轮传动机构的输入端,所述齿轮传动机构的输出端连接至抓夹臂并带动抓夹臂旋转。夹持过程中不会有旋转扭矩产生,受力合理,车轮可实现X轴和Z轴移动,夹具可实现抱
高速重载桁架机械手.pdf
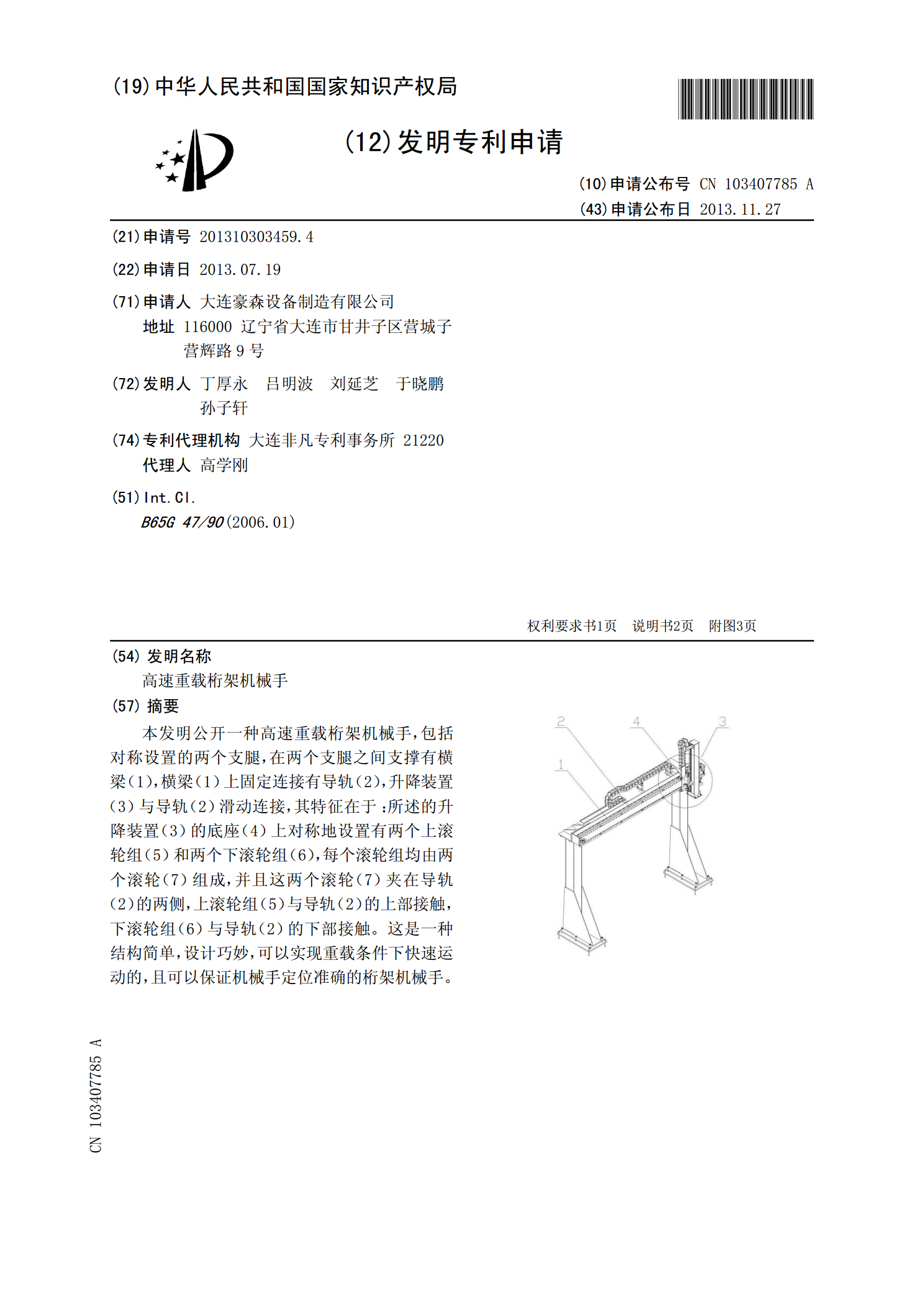
本发明公开一种高速重载桁架机械手,包括对称设置的两个支腿,在两个支腿之间支撑有横梁(1),横梁(1)上固定连接有导轨(2),升降装置(3)与导轨(2)滑动连接,其特征在于:所述的升降装置(3)的底座(4)上对称地设置有两个上滚轮组(5)和两个下滚轮组(6),每个滚轮组均由两个滚轮(7)组成,并且这两个滚轮(7)夹在导轨(2)的两侧,上滚轮组(5)与导轨(2)的上部接触,下滚轮组(6)与导轨(2)的下部接触。这是一种结构简单,设计巧妙,可以实现重载条件下快速运动的,且可以保证机械手定位准确的桁架机械手。

重载物料装卸载机械手.pdf
本发明公开了重载物料装卸载机械手,属于橡胶物料装载机械;包括位于吊装轨道间的移动架、抓取机构、提升机构、回转支撑;抓取机构用以抓取物料,包括连接横梁、横梁两端的左右吊臂、固定在两吊臂底部的固定钩爪、移动钩爪;移动钩爪位于固定钩爪上方,通过穿过中部的转轴固定在吊臂上,由锁紧气缸驱动一端使抓接端向下移动与固定钩爪配合锁紧;提升机构位于抓取机构上方,与抓取机构固定连接,顶部固定在回转支撑内;回转支撑通过支撑架固定在移动架上;移动架通过两侧的双电机同步驱动沿吊装轨道移动。本发明在装载物料时抓取稳固、全方位运行、自