
高速重载桁架机械手.pdf

一吃****春艳

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
高速重载桁架机械手.pdf
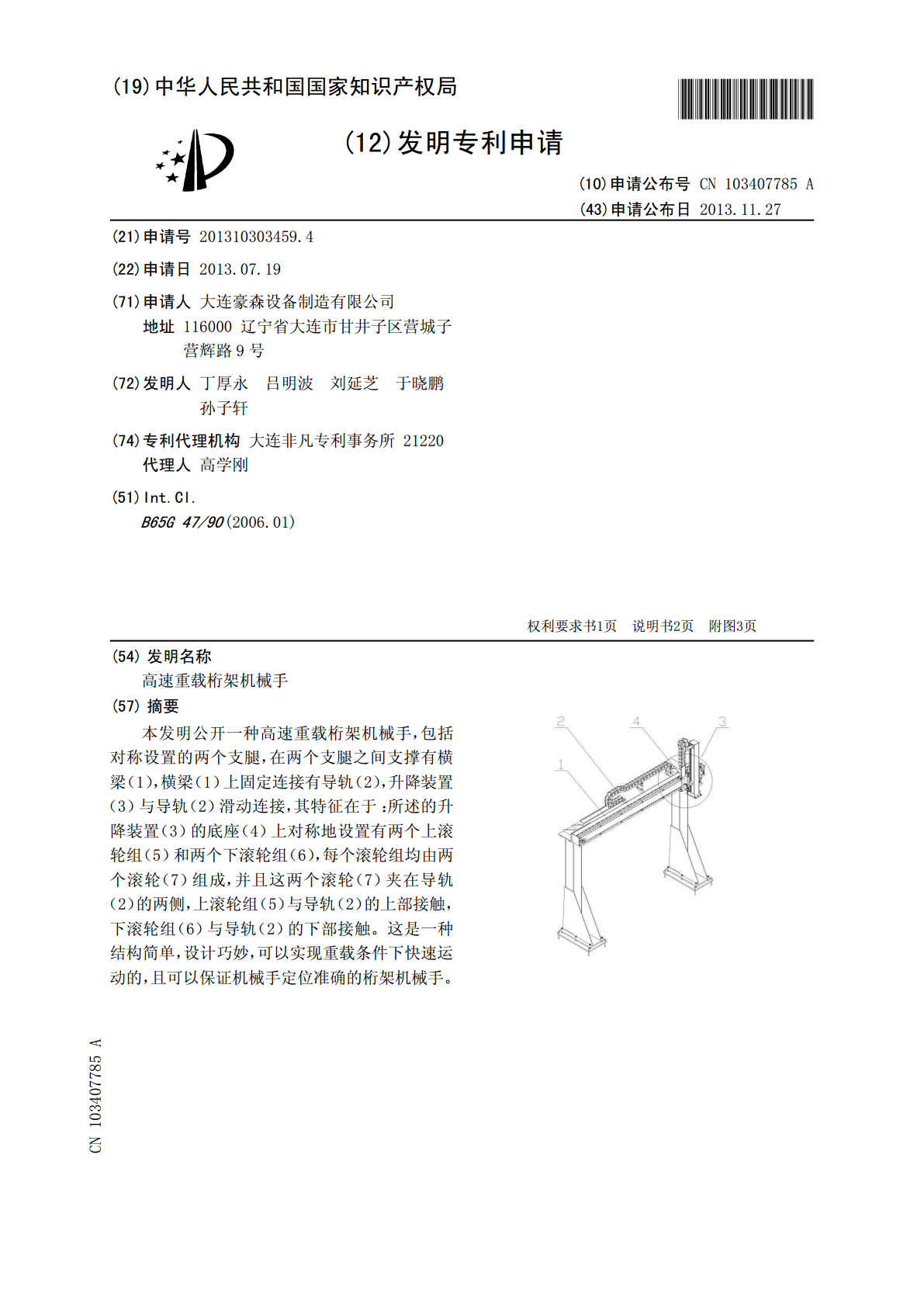
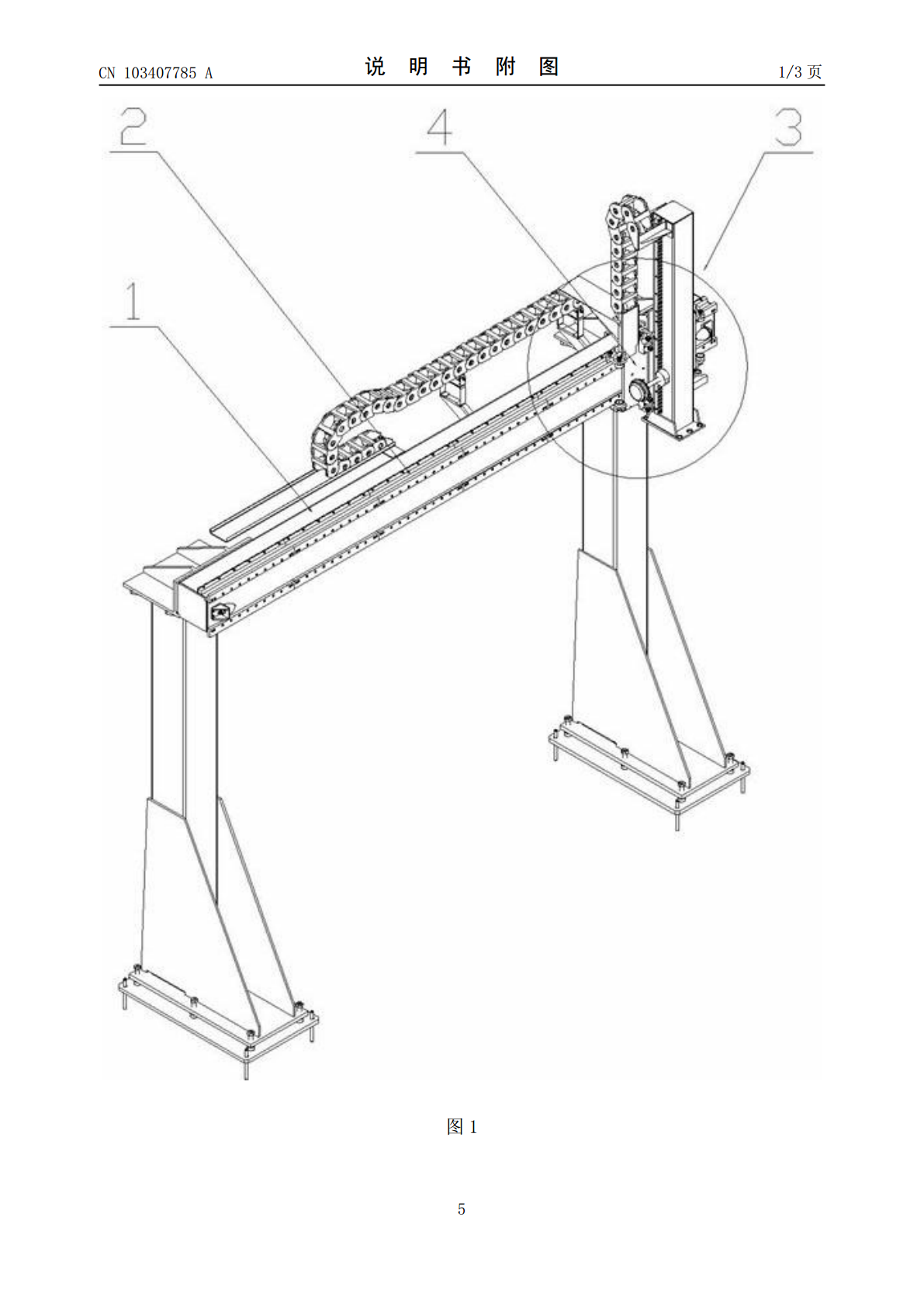
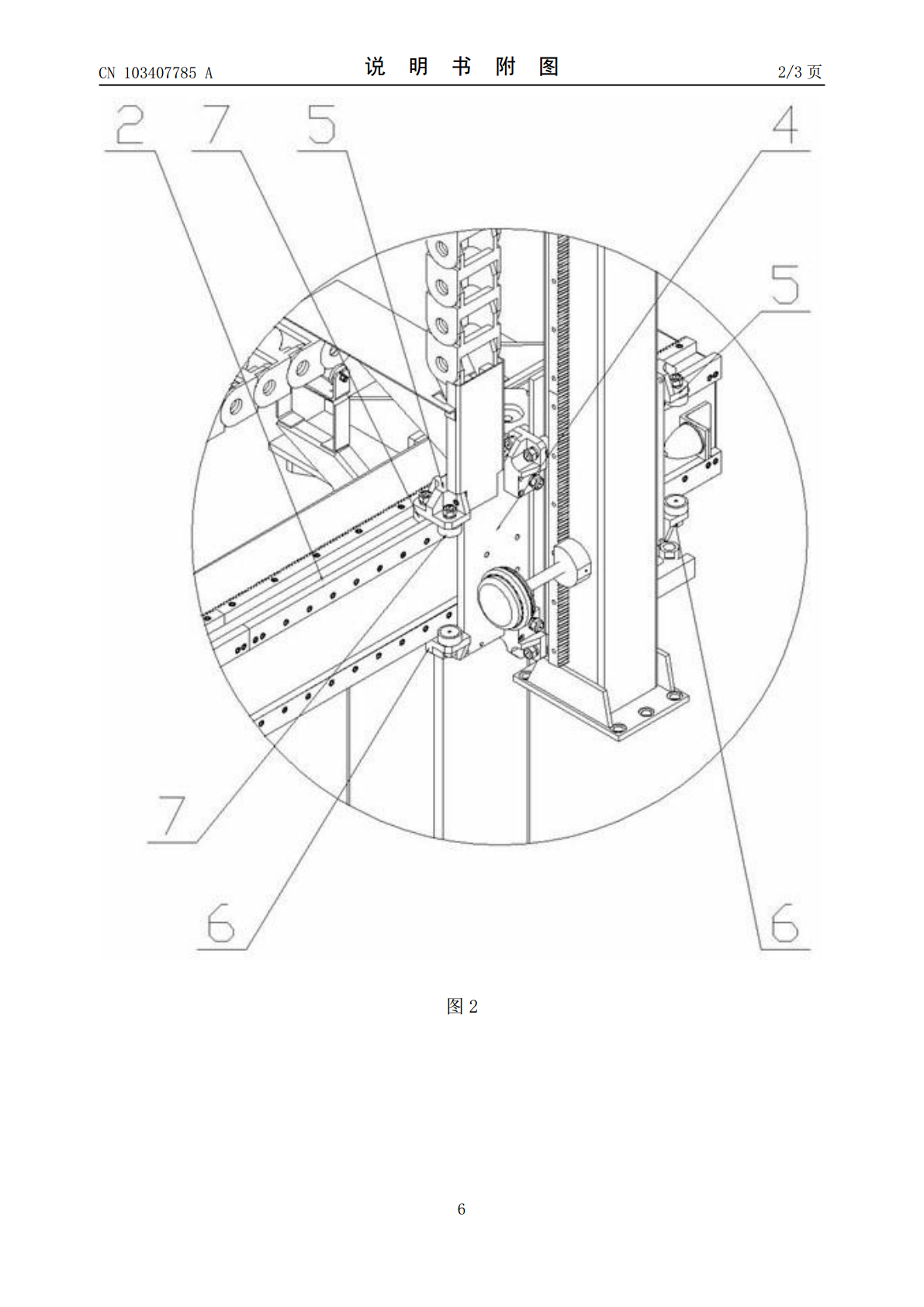
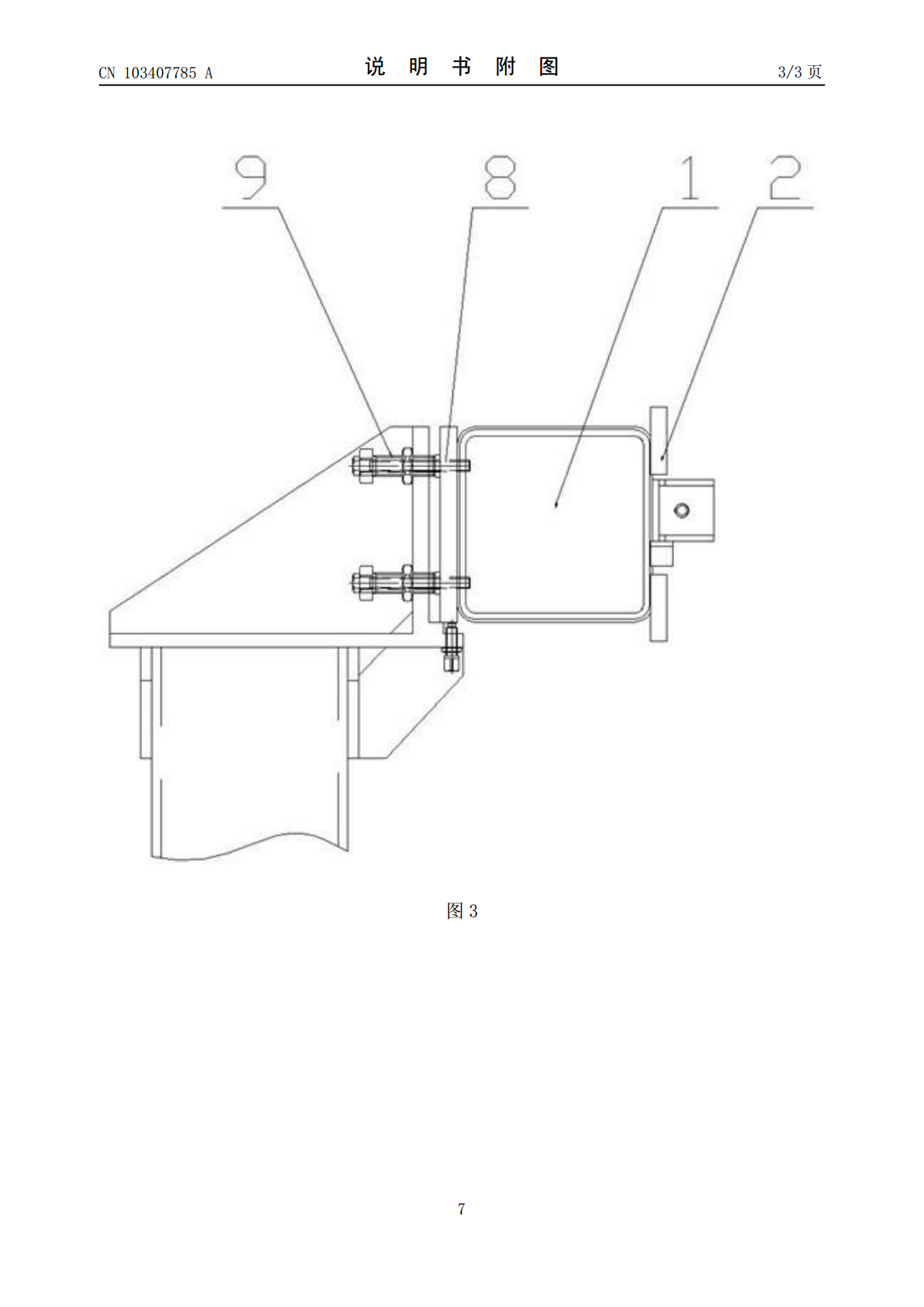
本发明公开一种高速重载桁架机械手,包括对称设置的两个支腿,在两个支腿之间支撑有横梁(1),横梁(1)上固定连接有导轨(2),升降装置(3)与导轨(2)滑动连接,其特征在于:所述的升降装置(3)的底座(4)上对称地设置有两个上滚轮组(5)和两个下滚轮组(6),每个滚轮组均由两个滚轮(7)组成,并且这两个滚轮(7)夹在导轨(2)的两侧,上滚轮组(5)与导轨(2)的上部接触,下滚轮组(6)与导轨(2)的下部接触。这是一种结构简单,设计巧妙,可以实现重载条件下快速运动的,且可以保证机械手定位准确的桁架机械手。
高速桁架机械手.pdf
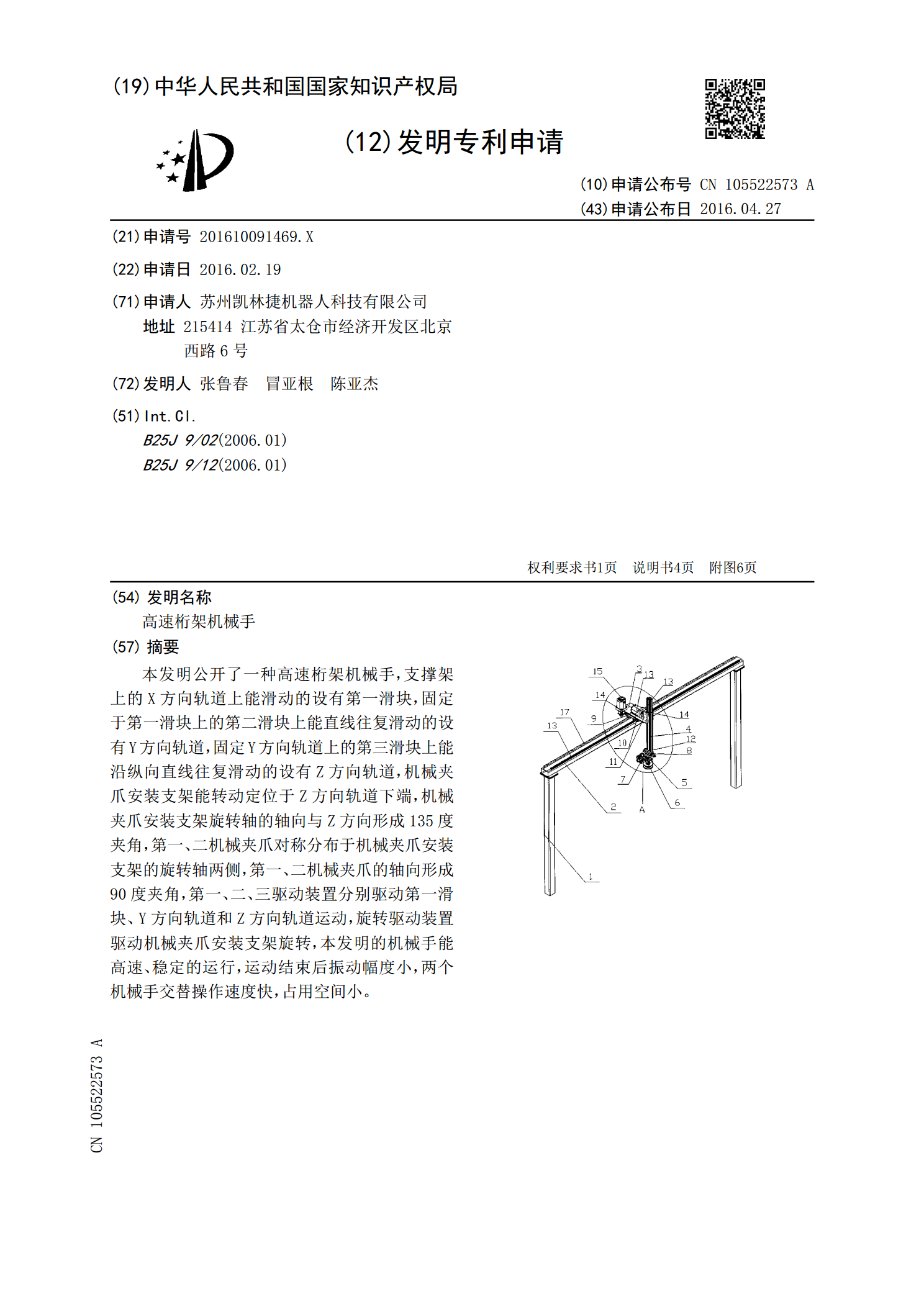
本发明公开了一种高速桁架机械手,支撑架上的X方向轨道上能滑动的设有第一滑块,固定于第一滑块上的第二滑块上能直线往复滑动的设有Y方向轨道,固定Y方向轨道上的第三滑块上能沿纵向直线往复滑动的设有Z方向轨道,机械夹爪安装支架能转动定位于Z方向轨道下端,机械夹爪安装支架旋转轴的轴向与Z方向形成135度夹角,第一、二机械夹爪对称分布于机械夹爪安装支架的旋转轴两侧,第一、二机械夹爪的轴向形成90度夹角,第一、二、三驱动装置分别驱动第一滑块、Y方向轨道和Z方向轨道运动,旋转驱动装置驱动机械夹爪安装支架旋转,本发明的机械

桁架机械手.pdf
本发明涉及机械手技术领域,且公开了桁架机械手,包括支撑杆,所述支撑杆的下部固定连接有下部连接板,所述下部连接板下部的中部活动连接有万向轮,所述下部连接板一侧的内部活动套接有活动柱。该桁架机械手,通过将装置齿轮一活动套接在横杆一侧的内部,同时将装置滑轮一分别活动套接在横杆的上部和下部,同时装置上部连接板在装置弹簧二弹性作用下推动与电机一之间的距离进行调节,同时在需要拆卸时,通过向上推动装置上部连接板即可带动装置滑轮一偏离横杆的内部,使得可方便将装置滑轮一进行拆卸的作用,装置支撑柱的上部活动套接在夹套一的内部
智能重载机械手.pdf
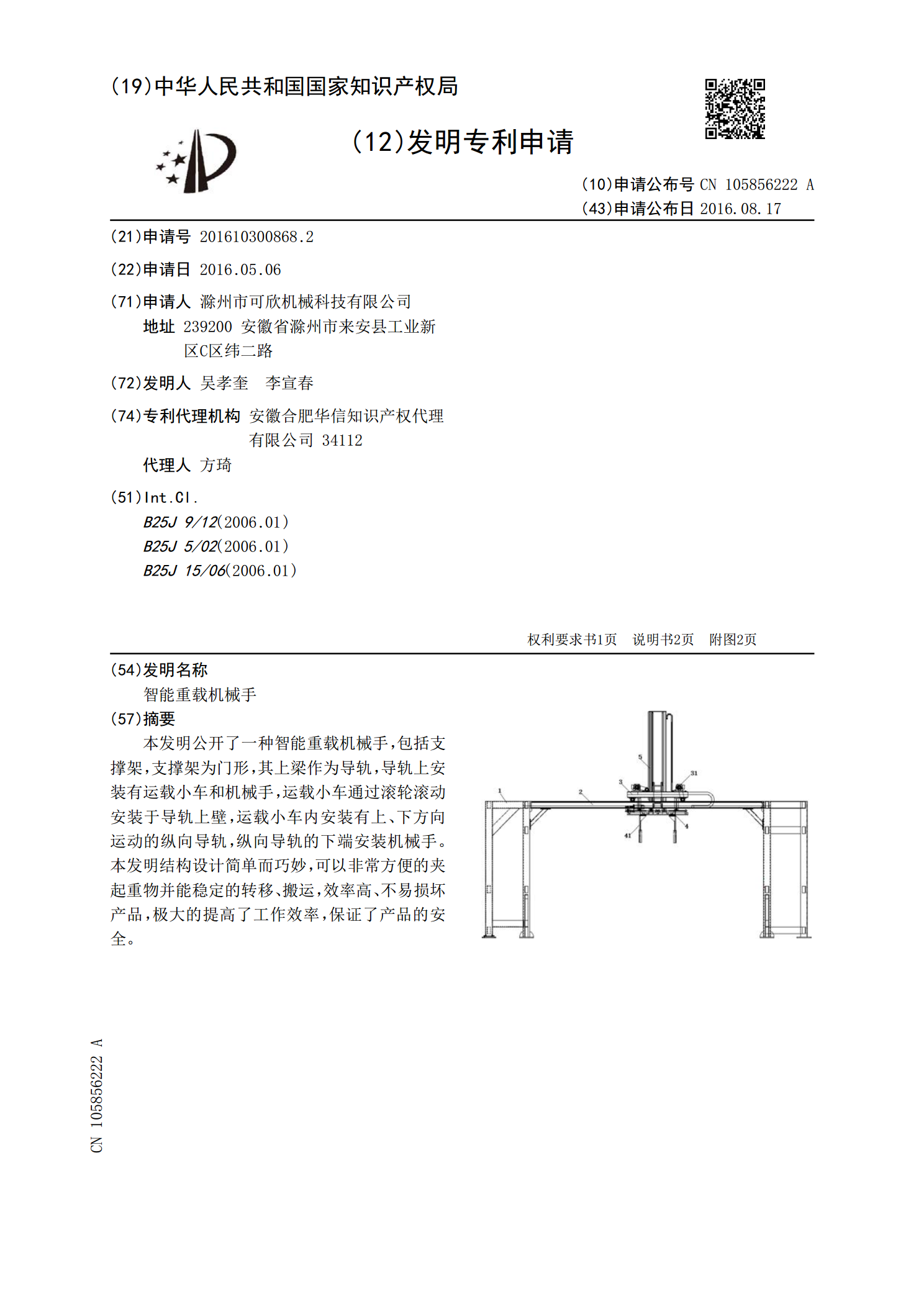
本发明公开了一种智能重载机械手,包括支撑架,支撑架为门形,其上梁作为导轨,导轨上安装有运载小车和机械手,运载小车通过滚轮滚动安装于导轨上壁,运载小车内安装有上、下方向运动的纵向导轨,纵向导轨的下端安装机械手。本发明结构设计简单而巧妙,可以非常方便的夹起重物并能稳定的转移、搬运,效率高、不易损坏产品,极大的提高了工作效率,保证了产品的安全。

桁架搬运机械手.pdf
本发明提供了一种桁架搬运机械手,包括搬运机械手、至少两根横梁,每根横梁的下方支撑有支腿,每根横梁的前面的同等位置上横向设有直线导轨,直线导轨上设有搬运机械手,每根横梁的前面上横向开设有T形安装槽,T形安装槽中设有多个T形螺母,直线导轨上设有多个安装圆孔,安装圆孔中设有第一螺钉,第一螺钉穿过安装圆孔后连接T形螺母,以连接直线导轨与横梁,横梁的后面的下端向后延伸有连接板,相邻两根横梁的连接板之间通过连接块进行连接。本发明的横梁及直线导轨可根据需要进行无限拼接,不仅移动和运输方便,而且可根据需要调整桁架搬运机械