
磁悬浮轴承系统转子不平衡激励观测与位移振动抑制方法.pdf

一只****签网

1/10
2/10

3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
磁悬浮轴承系统转子不平衡激励观测与位移振动抑制方法.pdf
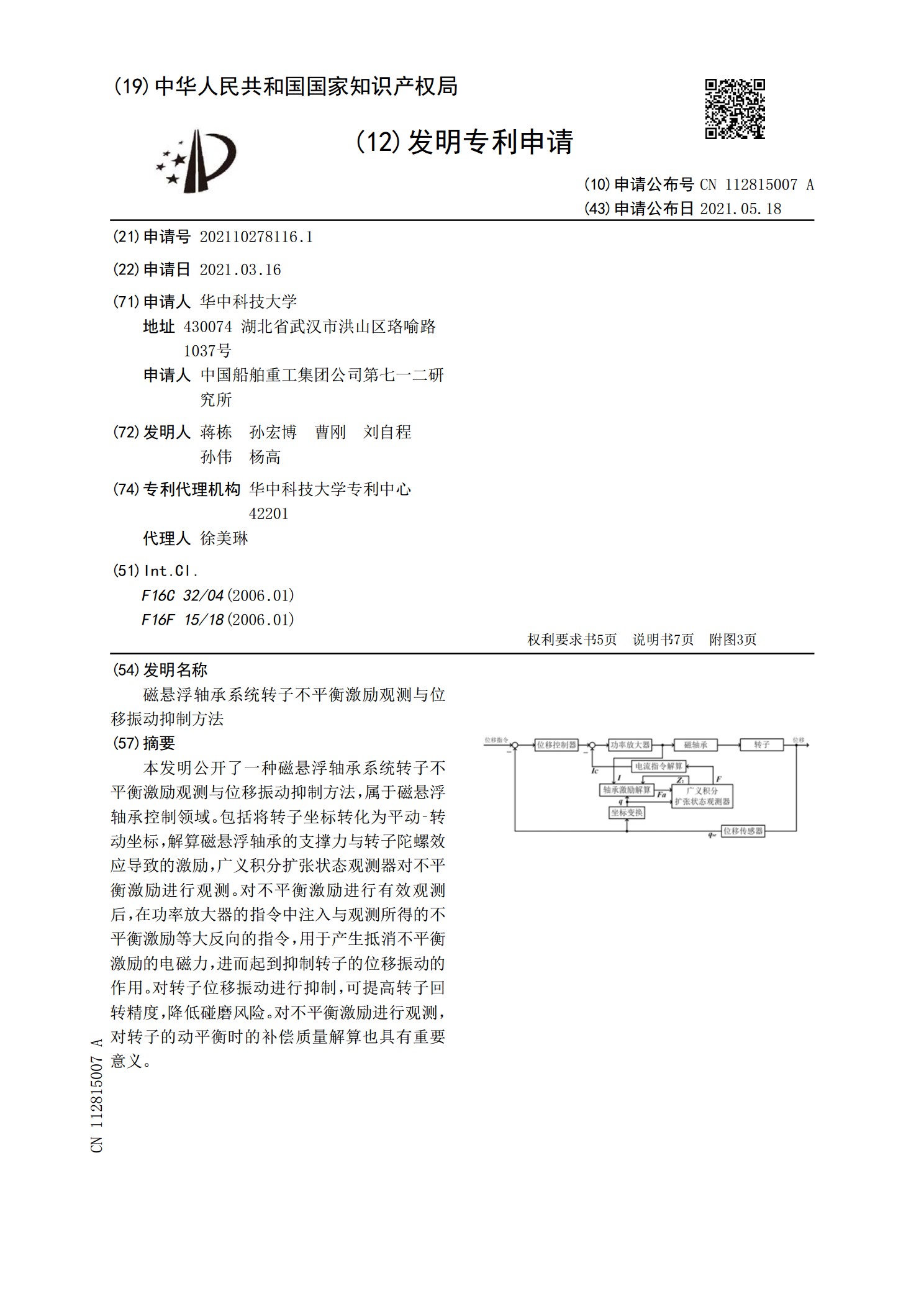
本发明公开了一种磁悬浮轴承系统转子不平衡激励观测与位移振动抑制方法,属于磁悬浮轴承控制领域。包括将转子坐标转化为平动‑转动坐标,解算磁悬浮轴承的支撑力与转子陀螺效应导致的激励,广义积分扩张状态观测器对不平衡激励进行观测。对不平衡激励进行有效观测后,在功率放大器的指令中注入与观测所得的不平衡激励等大反向的指令,用于产生抵消不平衡激励的电磁力,进而起到抑制转子的位移振动的作用。对转子位移振动进行抑制,可提高转子回转精度,降低碰磨风险。对不平衡激励进行观测,对转子的动平衡时的补偿质量解算也具有重要意义。

磁悬浮轴承转子位移自检测方法.docx
磁悬浮轴承转子位移自检测方法磁悬浮轴承是一种先进的轴承技术,在许多领域都得到了广泛的应用,如机械和电力工程等。磁悬浮轴承具有无磨损、无接触、无振动、无噪音等优点,能够提高轴承的寿命和性能。然而,由于磁悬浮轴承的工作原理复杂,其转子位移检测一直是一个具有挑战性的问题。为了解决这个问题,研究人员提出了各种各样的自检测方法。本文将探讨磁悬浮轴承转子位移自检测方法的研究现状、原理和应用。目前,磁悬浮轴承转子位移自检测方法主要包括传感器反馈、信号分析和模型预测三种方法。传感器反馈方法是最常用的方法之一,通过安装位移

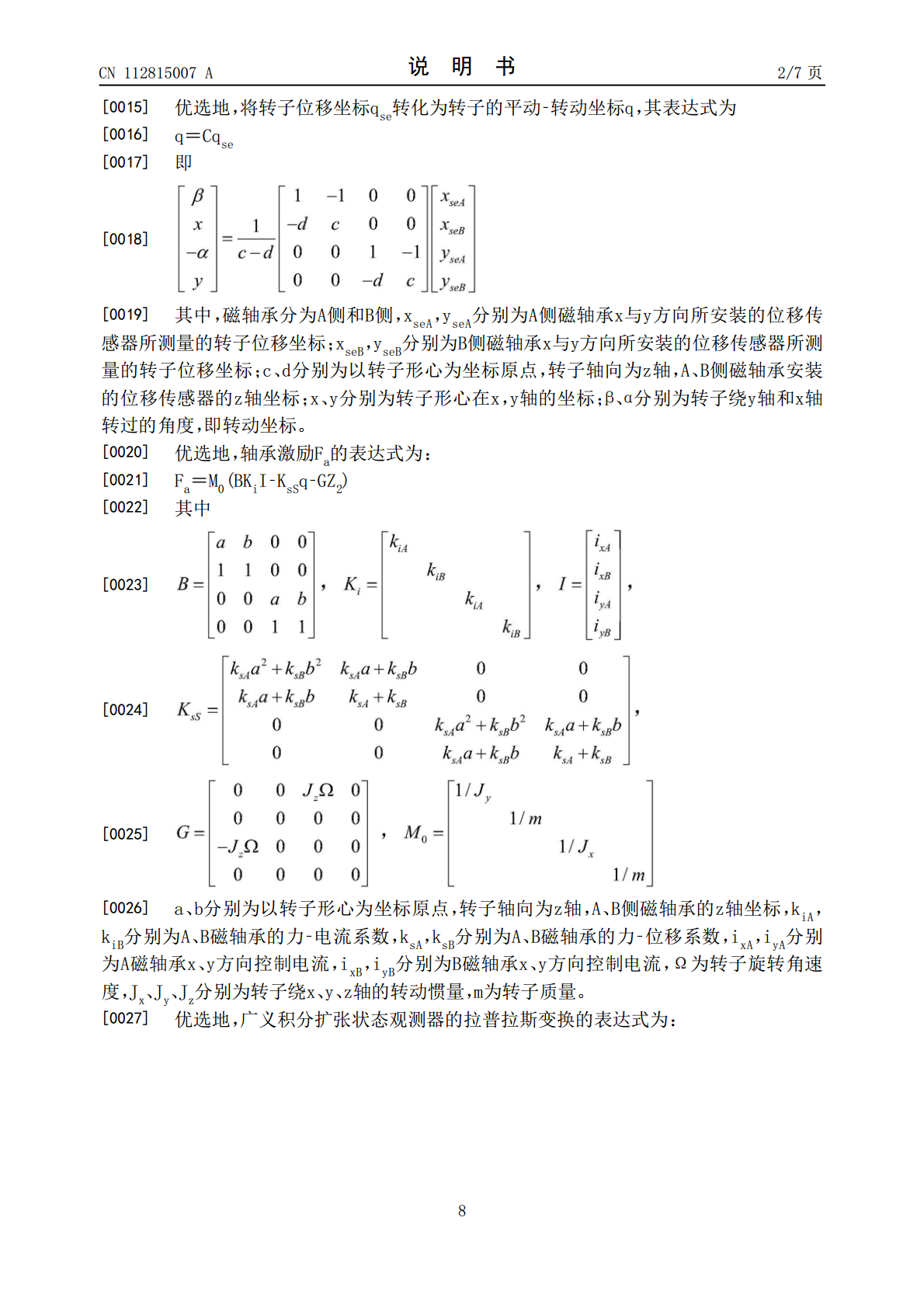
一种主动磁悬浮轴承转子的解耦和不平衡振动控制方法.pdf
本发明公开了一种主动磁悬浮轴承转子的解耦和不平衡振动控制方法,属于磁悬浮轴承控制领域,能够解决磁悬浮转子存在的耦合问题和由于转子的不平衡导致的振动问题,实现系统的稳定控制。本发明包括以下步骤:首先,根据转子动力学方程,建立转子的不平衡振动的系统模型,把系统模型中存在的位置耦合、陀螺效应耦合、不平衡振动耦合分量都当作扰动信号处理,设计状态观测器对这种扰动进行估计和补偿,使四个位置自由度子系统各自独立;采用自适应陷波器和非线性反馈控制律相结合的控制方法,推导子系统的闭环反馈简化结构,分析其频率特性,从BODE

电磁轴承-转子系统不平衡振动控制方法及电子设备.pdf
本发明实施例提供一种电磁轴承‑转子系统不平衡振动控制方法及电子设备,电磁轴承‑转子系统不平衡振动控制方法,包括:S11、获取转子上预设位置处的位移信号;S12、对所述位移信号进行LMS算法处理,得到跟随信号;S13、将所述跟随信号与所述位移信号相叠加,得到期望信号;S14、对所述期望信号进行处理,得到电磁力控制信号,通过所述电磁力控制信号控制电磁轴承的电磁支撑力;重复执行步骤S11‑S14,以使所述位移信号趋近于零。本申请扩展了LMS算法在电磁轴承‑转子系统不平衡振动控制中的使用位置,提高了不同情况下电磁

动力磁悬浮轴承转子位移检测系统研究的综述报告.docx
动力磁悬浮轴承转子位移检测系统研究的综述报告动力磁悬浮轴承技术是一种比传统轴承更为先进的技术,其主要特点是通过使用磁场将转轴悬浮在永磁体上,从而消除了机械接触,达到了低噪声、低振动的效果,同时提高了轴承寿命和运行稳定性。然而,动力磁悬浮轴承在运行过程中,由于存在电磁场及磁化力的影响,容易发生转子轨迹偏移,导致轴承性能下降。因此,研究动力磁悬浮轴承转子位移变化的检测系统,对于评估轴承的性能以及故障诊断具有重要意义。一般来说,动力磁悬浮轴承的转子位移检测系统可以分为两类:一类是基于传感器的检测系统,另一类是基