
电磁轴承-转子系统不平衡振动控制方法及电子设备.pdf

努力****晓骞


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

电磁轴承-转子系统不平衡振动控制方法及电子设备.pdf
本发明实施例提供一种电磁轴承‑转子系统不平衡振动控制方法及电子设备,电磁轴承‑转子系统不平衡振动控制方法,包括:S11、获取转子上预设位置处的位移信号;S12、对所述位移信号进行LMS算法处理,得到跟随信号;S13、将所述跟随信号与所述位移信号相叠加,得到期望信号;S14、对所述期望信号进行处理,得到电磁力控制信号,通过所述电磁力控制信号控制电磁轴承的电磁支撑力;重复执行步骤S11‑S14,以使所述位移信号趋近于零。本申请扩展了LMS算法在电磁轴承‑转子系统不平衡振动控制中的使用位置,提高了不同情况下电磁

主动电磁轴承——转子系统振动控制技术.docx
主动电磁轴承——转子系统振动控制技术1.引言电机在现代工业中起着重要的作用,由于传统轴承存在摩擦、磨损等问题,因此研究电磁轴承在机械中的应用也越来越重要。主动电磁轴承是一种新型的机电集成技术,以电磁的力为支撑和约束对象,实现支撑和转动控制。主动电磁轴承是基于非接触式控制技术的一种机电转换装置,由于其具有高速、高精度、低摩擦和低噪声等优点,特别适合在高精度机械、精密仪器和高速轴承中应用。本文主要介绍主动电磁轴承在转子系统振动控制方面的技术应用。2.主动电磁轴承的结构主动电磁轴承主要由基座、导轨、上导轮、下导

主动电磁轴承--刚性转子系统振动主动控制.docx
主动电磁轴承--刚性转子系统振动主动控制主动电磁轴承——刚性转子系统振动主动控制摘要:主动电磁轴承(ActiveMagneticBearing,AMB)作为一种新兴的轴承技术,在刚性转子系统振动主动控制方面具有巨大的潜力。本文就主动电磁轴承的原理、优势及在刚性转子系统振动主动控制中的应用进行综述,并对其未来的发展趋势进行探讨。第一部分:引言刚性转子系统是众多工程领域中常见的一种装置,其用于传输动力或进行机械加工。然而,刚性转子系统在运行过程中常常会遇到振动问题,该问题如果不加以控制,将会给机器的运行稳定性
磁悬浮轴承系统转子不平衡激励观测与位移振动抑制方法.pdf
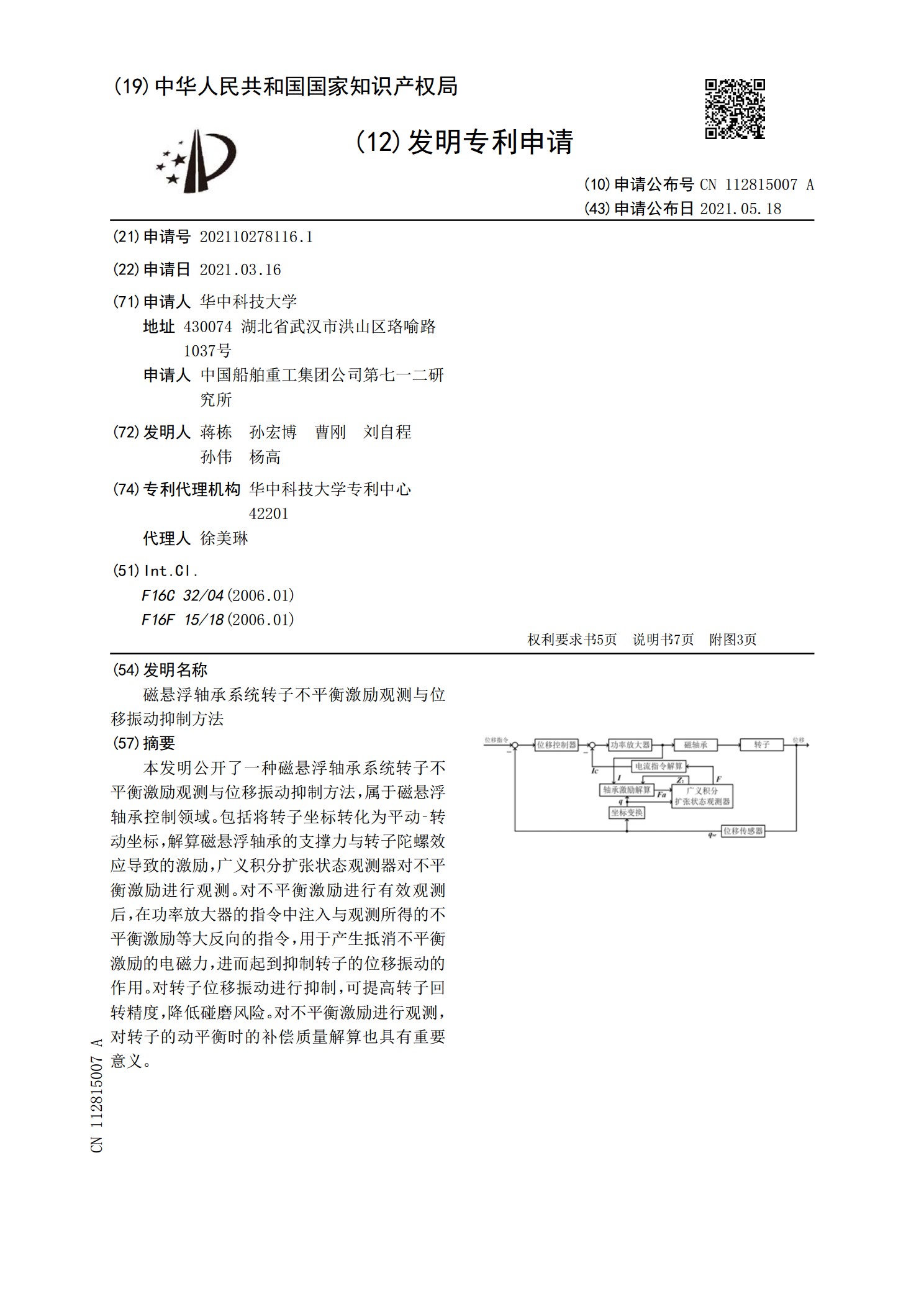
本发明公开了一种磁悬浮轴承系统转子不平衡激励观测与位移振动抑制方法,属于磁悬浮轴承控制领域。包括将转子坐标转化为平动‑转动坐标,解算磁悬浮轴承的支撑力与转子陀螺效应导致的激励,广义积分扩张状态观测器对不平衡激励进行观测。对不平衡激励进行有效观测后,在功率放大器的指令中注入与观测所得的不平衡激励等大反向的指令,用于产生抵消不平衡激励的电磁力,进而起到抑制转子的位移振动的作用。对转子位移振动进行抑制,可提高转子回转精度,降低碰磨风险。对不平衡激励进行观测,对转子的动平衡时的补偿质量解算也具有重要意义。

转子系统不平衡振动的磁流变控制方法研究.docx
转子系统不平衡振动的磁流变控制方法研究转子系统不平衡振动的磁流变控制方法研究摘要:随着工业发展的步伐,转子系统的不平衡振动成为影响机械设备性能和寿命的重要因素之一。磁流变控制技术作为一种新兴的智能控制方法,具有可调节性、高精度和实时性等优势,逐渐引起了研究者们的关注。本论文就转子系统不平衡振动的磁流变控制方法进行了深入研究,所得结果表明,磁流变控制方法在转子系统不平衡振动控制中具有重要的应用前景。第一章引言1.1研究背景转子系统的不平衡振动是由于转子旋转过程中的质量不均匀分布导致的,会引起机械设备的振动和