
手术支持系统和手术支持系统的控制方法.pdf

是你****优呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

手术支持系统和手术支持系统的控制方法.pdf
一种手术支持系统,其在使用图像采集单元观察的同时使用安装在机械手远端侧即从机械手的固定端看时的远端的治疗单元对目标组织执行治疗,该手术支持系统包括:机械手,其具有对应于多个自由度的关节并且包括关节之中具有冗余关系的至少两个冗余关节;操作单元,其被构造成提供对应于自由度的操作信息;位置关系计算单元,其计算所述目标组织或所述治疗单元和所述图像采集单元之间的切换位置关系;控制单元,其根据所述操作信息来控制所述关节的操作。所述控制单元基于所述切换位置关系,使用一个冗余关节作为驱动关节并且使用其它冗余关节作为固定关

手术工具、手术支持系统和手术操作单元.pdf
提供了一种具有开闭式末端执行器的手术工具。该手术工具具有:轴;腕部,所述腕部连接成可绕第一轴线转动;第一钳夹构件和第二钳夹构件,每个钳夹构件被支撑成可绕第二轴线转动;以及弹性体,所述弹性体在第一钳夹构件和第二钳夹构件之间施加排斥力。所述手术工具还包括:第一钳夹绞盘,所述第一钳夹绞盘被设置成适合于第一钳夹构件的形状;第一线缆,所述第一线缆拉动第一钳夹构件;第二钳夹绞盘,所述第二钳夹绞盘被设置成适合于第二钳夹构件的形状;以及第二线缆,所述第二线缆拉动第二钳夹构件。

手术工具、手术支持系统和手术操作单元.pdf
为了提供一种具有开闭式末端效应器(例如,钳子)并且被配置成尺寸小、重量轻的手术工具,该手术工具设置有:轴(102);俯仰单元(401),连接到轴(102)的一端以可绕第一轴线转动;滚动单元(402),被支撑以可相对于俯仰单元(401)绕第二轴线旋转;以及抓握单元(403),被支撑以可相对于滚动单元(402)在第二轴线方向上线性移动,并且手术工具还包括一对钳口(405a、405b),该对钳口附接到滚动单元(402)在第二轴线方向上的下端,并且与抓握单元(403)在第二轴线方向上的线性移动相结合地打开和闭合。

手术支持系统.pdf
为了减少医疗错误,例如,外科手术部位错认为另一个部分。一种手术支持系统包括:模型图象形成单元,其根据包括手术过程、在右侧或者左侧上的外科手术和外科手术体位的所输入的外科手术信息将标记施加到相应的外科手术体位的外科手术部位,以形成人体模型图像;和显示控制单元,其将由模型图象形成单元形成的人体模型图像显示在显示单元上。
外科手术支持系统和手术器械.pdf
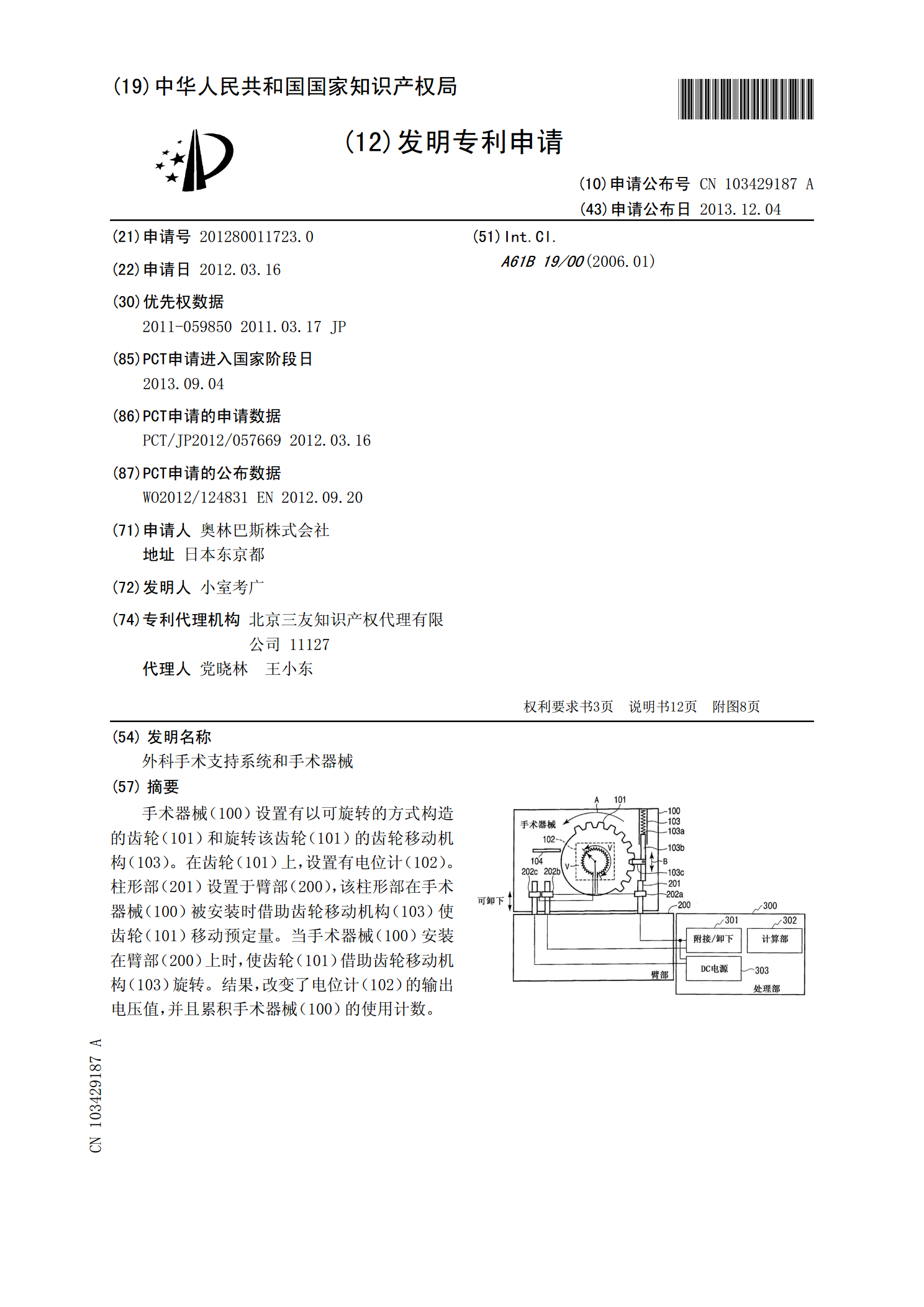
手术器械(100)设置有以可旋转的方式构造的齿轮(101)和旋转该齿轮(101)的齿轮移动机构(103)。在齿轮(101)上,设置有电位计(102)。柱形部(201)设置于臂部(200),该柱形部在手术器械(100)被安装时借助齿轮移动机构(103)使齿轮(101)移动预定量。当手术器械(100)安装在臂部(200)上时,使齿轮(101)借助齿轮移动机构(103)旋转。结果,改变了电位计(102)的输出电压值,并且累积手术器械(100)的使用计数。