
远程支持系统和远程支持方法.pdf

夏萍****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共42页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

远程支持系统和远程支持方法.pdf
本公开涉及远程支持系统和远程支持方法。远程支持系统被配置为在车辆成为远程操作请求状况的情况下,判定所述车辆是否会与回避对象碰撞,远程支持系统被配置为在判定的成立被否定的情况下,不发出远程操作请求,远程支持系统被配置为在判定为车辆会与回避对象碰撞的情况下,生成用于车辆在预测碰撞位置处继续自动驾驶的第一速度计划和用于车辆在到达预测碰撞位置之前停止的第二速度计划,远程支持系统被配置为基于这些速度计划的偏离程度来判定是否发出远程操作请求。

远程支持系统和远程支持方法.pdf
本公开涉及远程支持系统和远程支持方法。车辆的至少一个处理器被配置为:针对从盲区消除位置起到由操作等待条件规定的位置为止的第一行驶路线,生成速度计划,其中,该速度计划以满足所述车辆从所述盲区消除位置起经过规定时间以规定的容许减速度以下而成为所述操作等待条件的要求的方式,规定针对所述第一行驶路线上的位置的所述车辆的速度;以及针对从当前时间点的所述车辆的位置起到所述盲区消除位置为止的第二行驶路线,指示所述车辆以在所述盲区消除位置处成为由所述速度计划规定的速度的方式在所述第二行驶路线上通过自动驾驶进行行驶。
皮带秤远程支持系统及远程支持方法.pdf
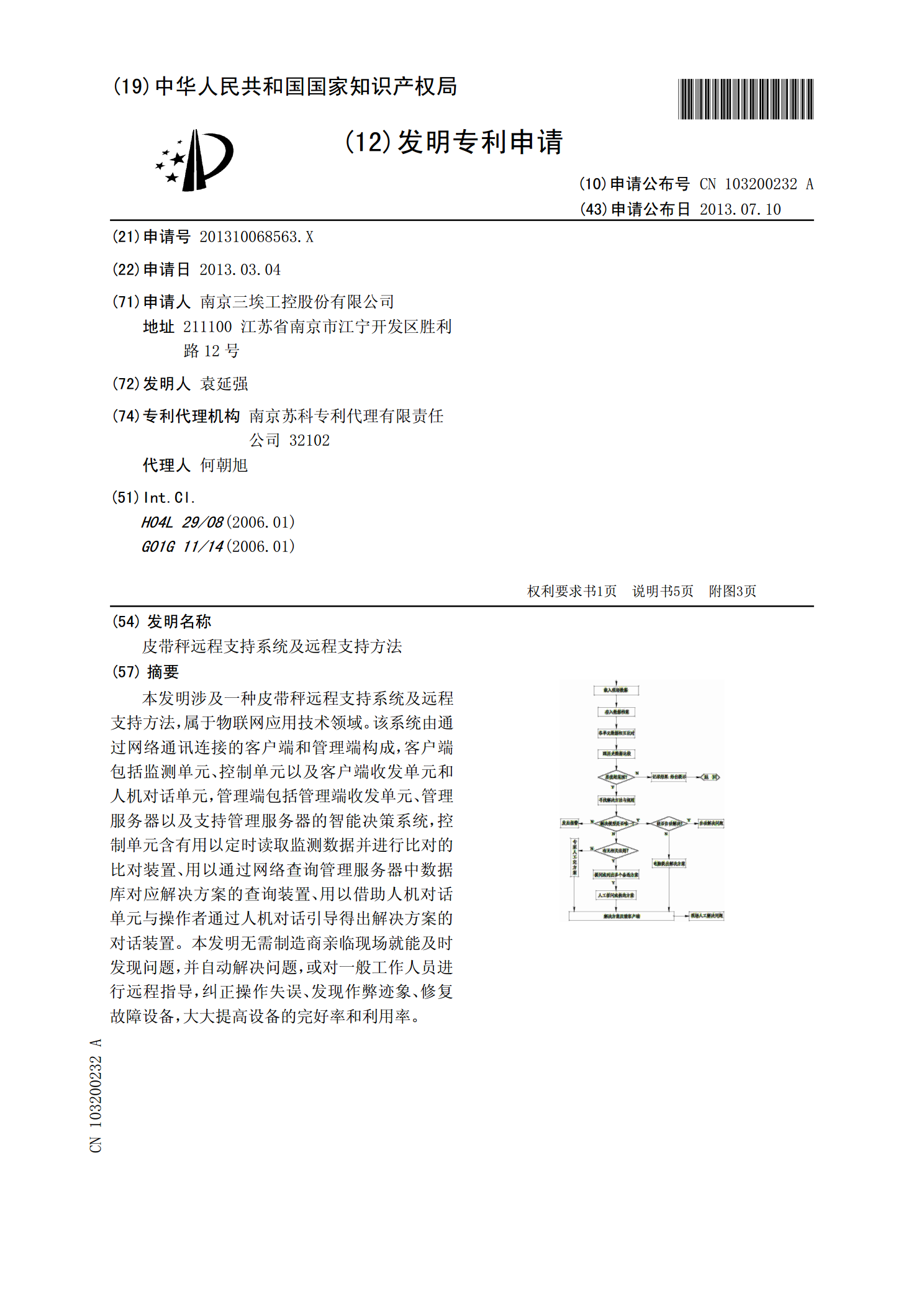
本发明涉及一种皮带秤远程支持系统及远程支持方法,属于物联网应用技术领域。该系统由通过网络通讯连接的客户端和管理端构成,客户端包括监测单元、控制单元以及客户端收发单元和人机对话单元,管理端包括管理端收发单元、管理服务器以及支持管理服务器的智能决策系统,控制单元含有用以定时读取监测数据并进行比对的比对装置、用以通过网络查询管理服务器中数据库对应解决方案的查询装置、用以借助人机对话单元与操作者通过人机对话引导得出解决方案的对话装置。本发明无需制造商亲临现场就能及时发现问题,并自动解决问题,或对一般工作人员进行远

电梯远程维护支持系统及电梯远程维护支持方法.pdf
本发明涉及具有多个电梯控制装置、中心装置以及由维护人员携带的终端的系统,该多个电梯控制装置分别具有将电梯的属性作为识别信息进行发送的识别信息发送器,中心装置具有:数据存储部,其按照每个属性存储将故障信息和恢复流程内容关联起来的应对表;以及指示信息生成器,其在接收到故障信息时,从与作为故障信息的发送源的电梯的属性信息对应的应对表中,提取与接收到的故障信息对应的恢复流程内容生成指示信息,并向终端进行发送。

电梯远程维护支持系统及电梯远程维护支持方法.pdf
具有电梯控制装置、中心装置和由维护人员持有的终端的系统,电梯控制装置具有生成在维护人员的恢复作业中由维护人员执行的操作信息的操作信息处理器,中心装置具有:数据存储部,其存储将故障信息和恢复流程内容关联起来的应对表;指示信息生成器,其在接收到故障信息时,从应对表中提取与接收到的故障信息对应的恢复流程内容,生成指示信息,并向终端发送;以及数据更新器,其在对指示信息与操作信息之间的一致度进行比较由此判断出指示信息的妥当性的基础上,更新应对表。