
一种基于桥梁转体姿态实时监测的桥梁转体方法及系统.pdf

一只****iu


1/10

2/10

3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于桥梁转体姿态实时监测的桥梁转体方法及系统.pdf
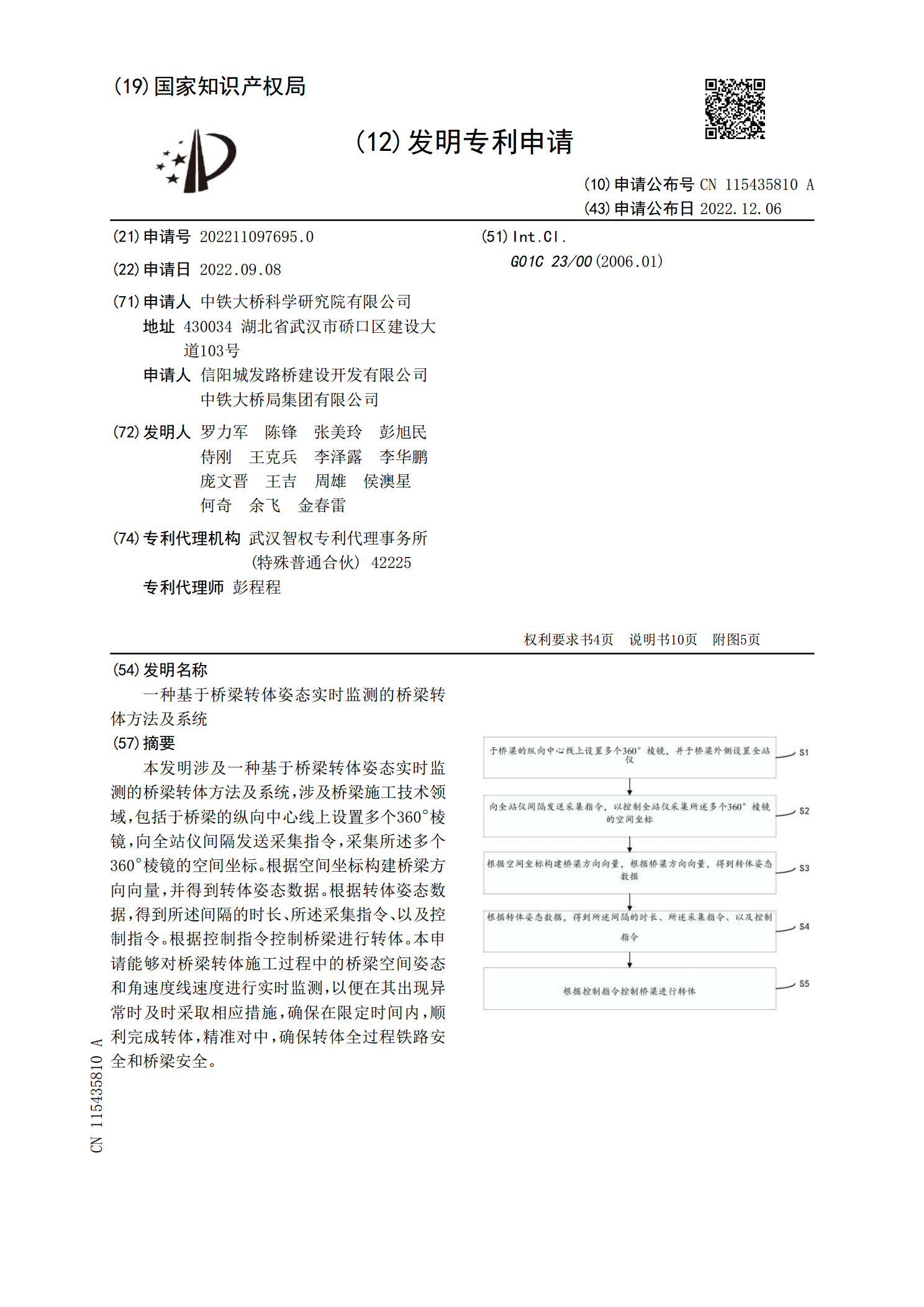
本发明涉及一种基于桥梁转体姿态实时监测的桥梁转体方法及系统,涉及桥梁施工技术领域,包括于桥梁的纵向中心线上设置多个360°棱镜,向全站仪间隔发送采集指令,采集所述多个360°棱镜的空间坐标。根据空间坐标构建桥梁方向向量,并得到转体姿态数据。根据转体姿态数据,得到所述间隔的时长、所述采集指令、以及控制指令。根据控制指令控制桥梁进行转体。本申请能够对桥梁转体施工过程中的桥梁空间姿态和角速度线速度进行实时监测,以便在其出现异常时及时采取相应措施,确保在限定时间内,顺利完成转体,精准对中,确保转体全过程铁路安全和
桥梁转体系统及其安装、转体方法.pdf
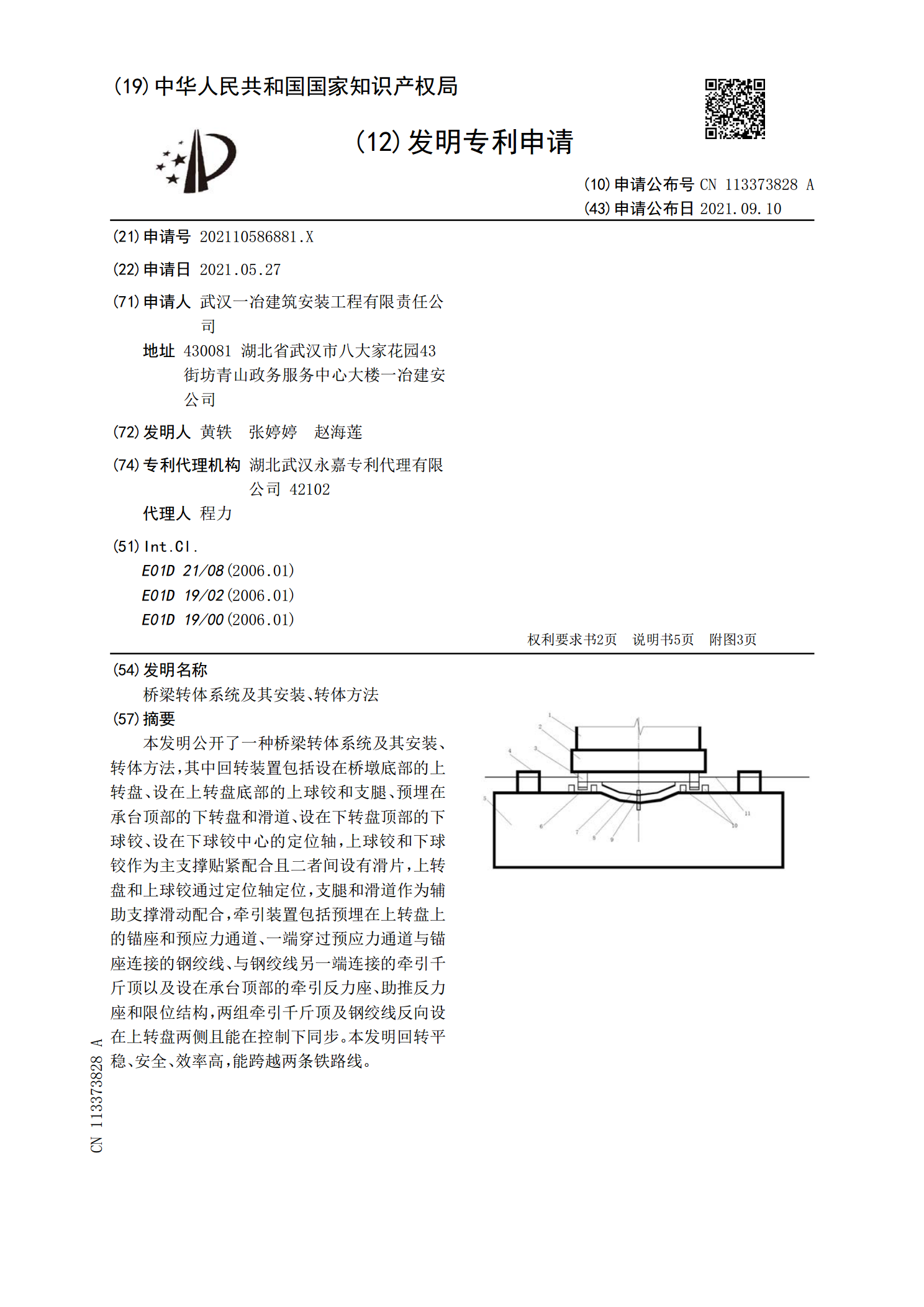
本发明公开了一种桥梁转体系统及其安装、转体方法,其中回转装置包括设在桥墩底部的上转盘、设在上转盘底部的上球铰和支腿、预埋在承台顶部的下转盘和滑道、设在下转盘顶部的下球铰、设在下球铰中心的定位轴,上球铰和下球铰作为主支撑贴紧配合且二者间设有滑片,上转盘和上球铰通过定位轴定位,支腿和滑道作为辅助支撑滑动配合,牵引装置包括预埋在上转盘上的锚座和预应力通道、一端穿过预应力通道与锚座连接的钢绞线、与钢绞线另一端连接的牵引千斤顶以及设在承台顶部的牵引反力座、助推反力座和限位结构,两组牵引千斤顶及钢绞线反向设在上转盘两
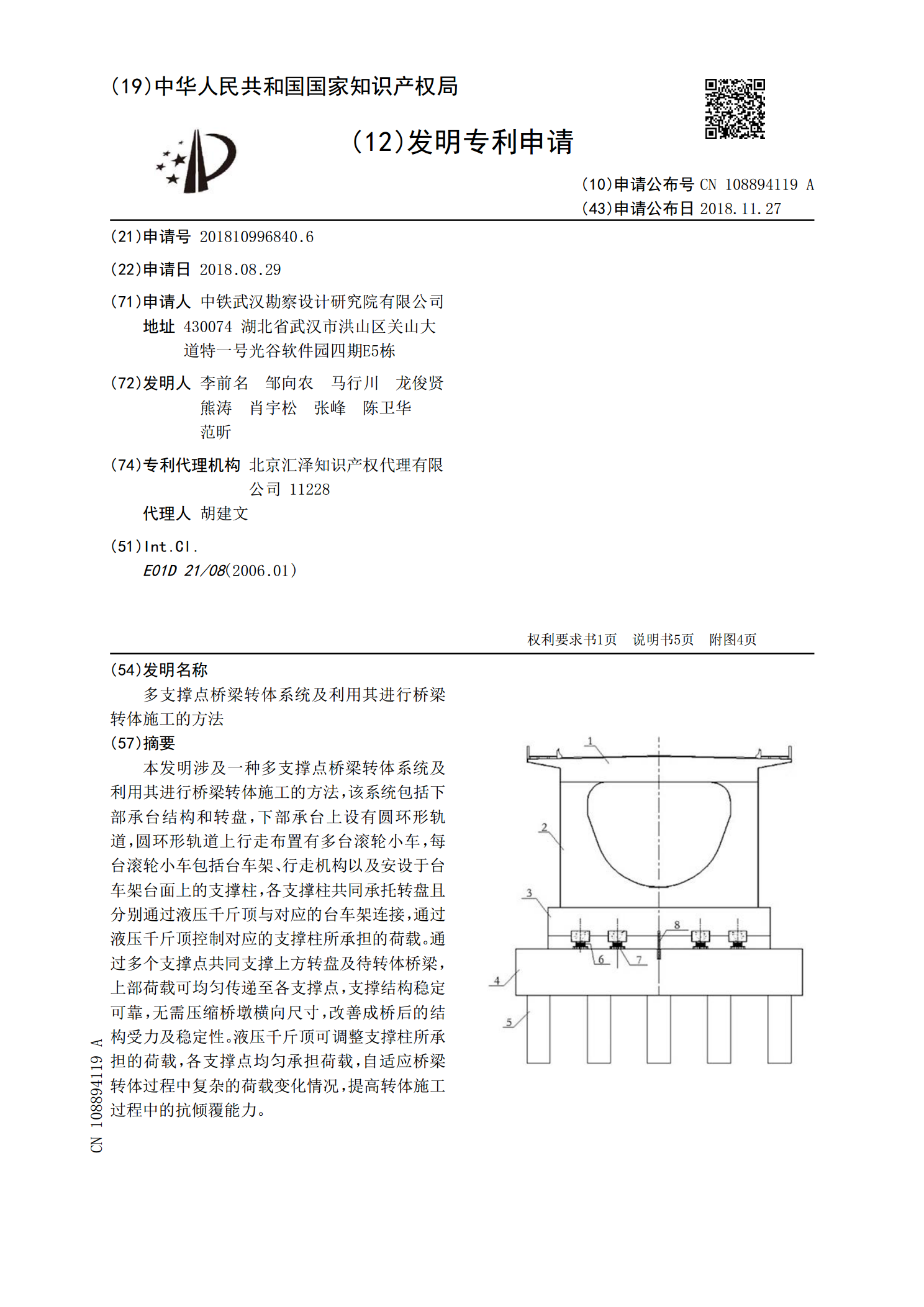
多支撑点桥梁转体系统及利用其进行桥梁转体施工的方法.pdf
本发明涉及一种多支撑点桥梁转体系统及利用其进行桥梁转体施工的方法,该系统包括下部承台结构和转盘,下部承台上设有圆环形轨道,圆环形轨道上行走布置有多台滚轮小车,每台滚轮小车包括台车架、行走机构以及安设于台车架台面上的支撑柱,各支撑柱共同承托转盘且分别通过液压千斤顶与对应的台车架连接,通过液压千斤顶控制对应的支撑柱所承担的荷载。通过多个支撑点共同支撑上方转盘及待转体桥梁,上部荷载可均匀传递至各支撑点,支撑结构稳定可靠,无需压缩桥墩横向尺寸,改善成桥后的结构受力及稳定性。液压千斤顶可调整支撑柱所承担的荷载,各支
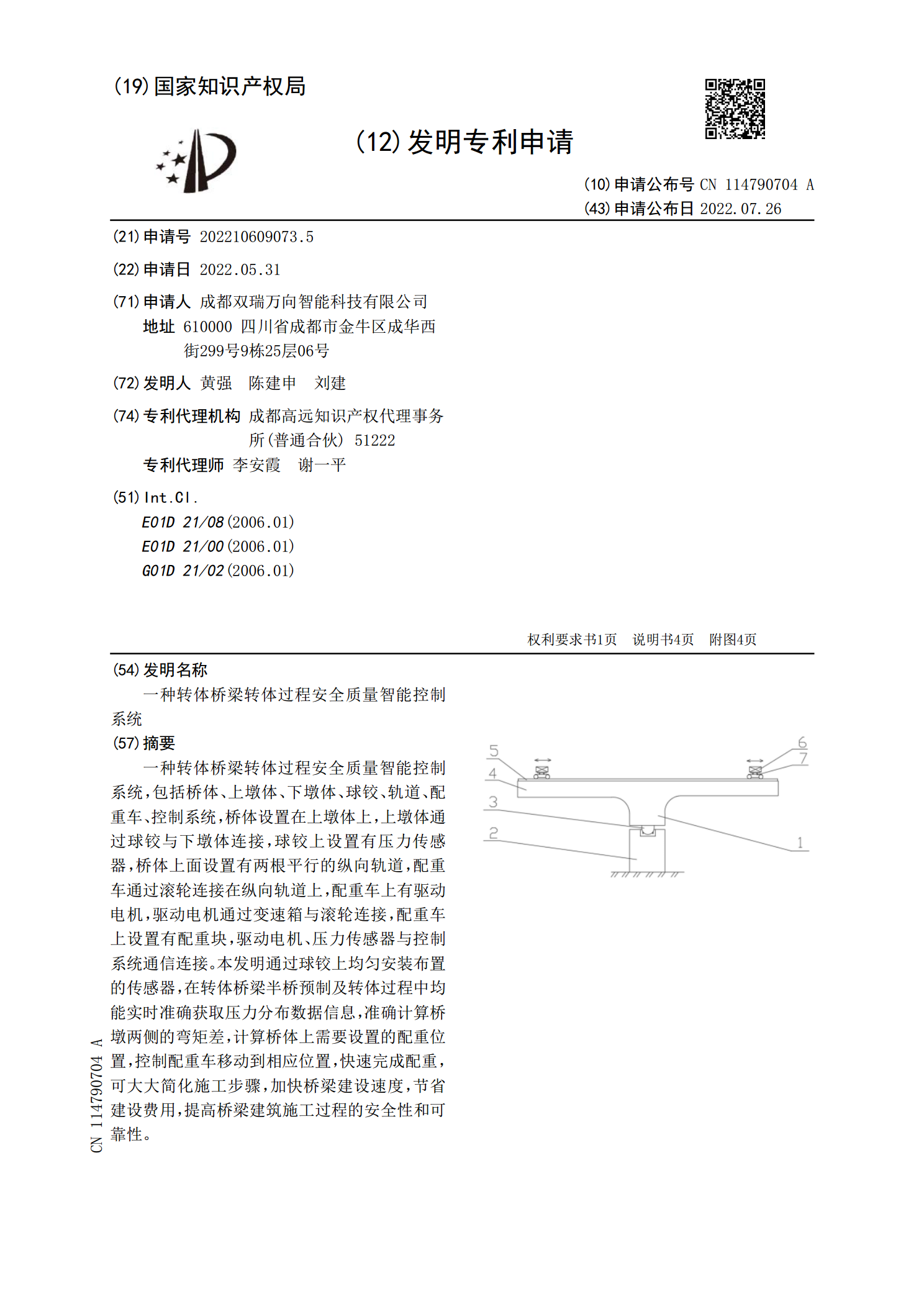
一种转体桥梁转体过程安全质量智能控制系统.pdf
一种转体桥梁转体过程安全质量智能控制系统,包括桥体、上墩体、下墩体、球铰、轨道、配重车、控制系统,桥体设置在上墩体上,上墩体通过球铰与下墩体连接,球铰上设置有压力传感器,桥体上面设置有两根平行的纵向轨道,配重车通过滚轮连接在纵向轨道上,配重车上有驱动电机,驱动电机通过变速箱与滚轮连接,配重车上设置有配重块,驱动电机、压力传感器与控制系统通信连接。本发明通过球铰上均匀安装布置的传感器,在转体桥梁半桥预制及转体过程中均能实时准确获取压力分布数据信息,准确计算桥墩两侧的弯矩差,计算桥体上需要设置的配重位置,控制
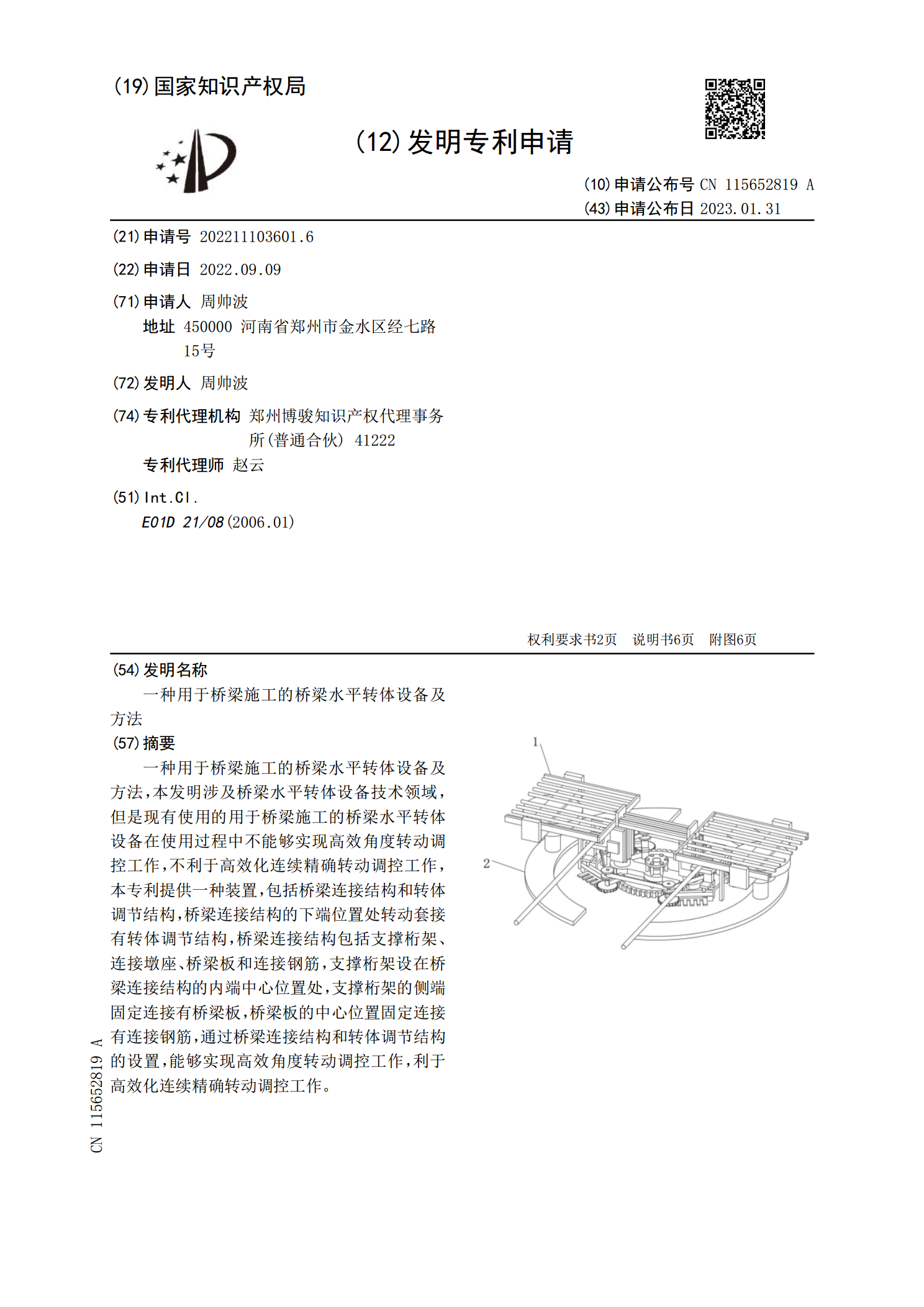
一种用于桥梁施工的桥梁水平转体设备及方法.pdf
一种用于桥梁施工的桥梁水平转体设备及方法,本发明涉及桥梁水平转体设备技术领域,但是现有使用的用于桥梁施工的桥梁水平转体设备在使用过程中不能够实现高效角度转动调控工作,不利于高效化连续精确转动调控工作,本专利提供一种装置,包括桥梁连接结构和转体调节结构,桥梁连接结构的下端位置处转动套接有转体调节结构,桥梁连接结构包括支撑桁架、连接墩座、桥梁板和连接钢筋,支撑桁架设在桥梁连接结构的内端中心位置处,支撑桁架的侧端固定连接有桥梁板,桥梁板的中心位置固定连接有连接钢筋,通过桥梁连接结构和转体调节结构的设置,能够实现