
一种外科手术辅助机器人及外科手术辅助机器人控制方法.pdf

康平****ng


1/9
2/9
3/9
4/9

5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种外科手术辅助机器人及外科手术辅助机器人控制方法.pdf
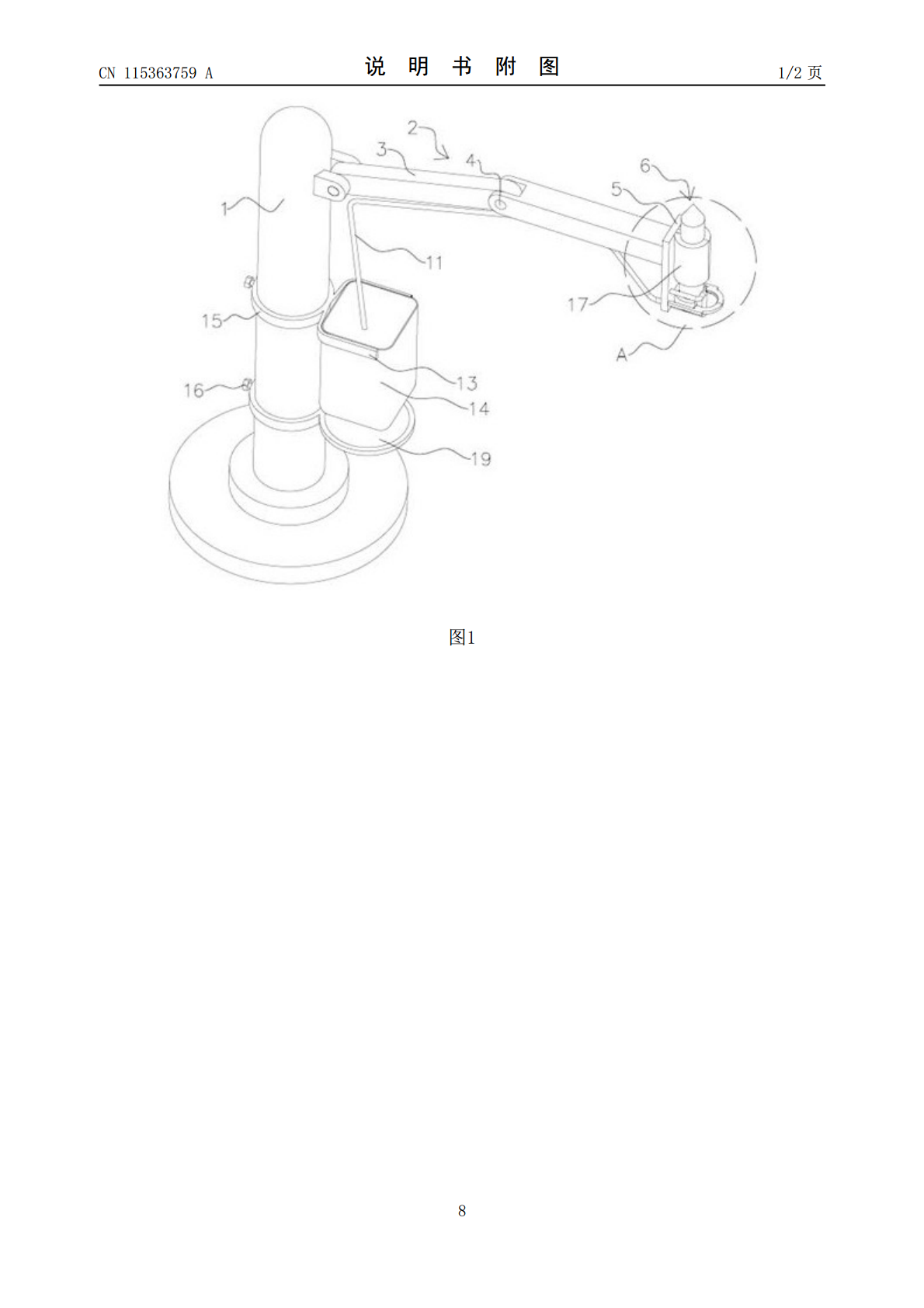
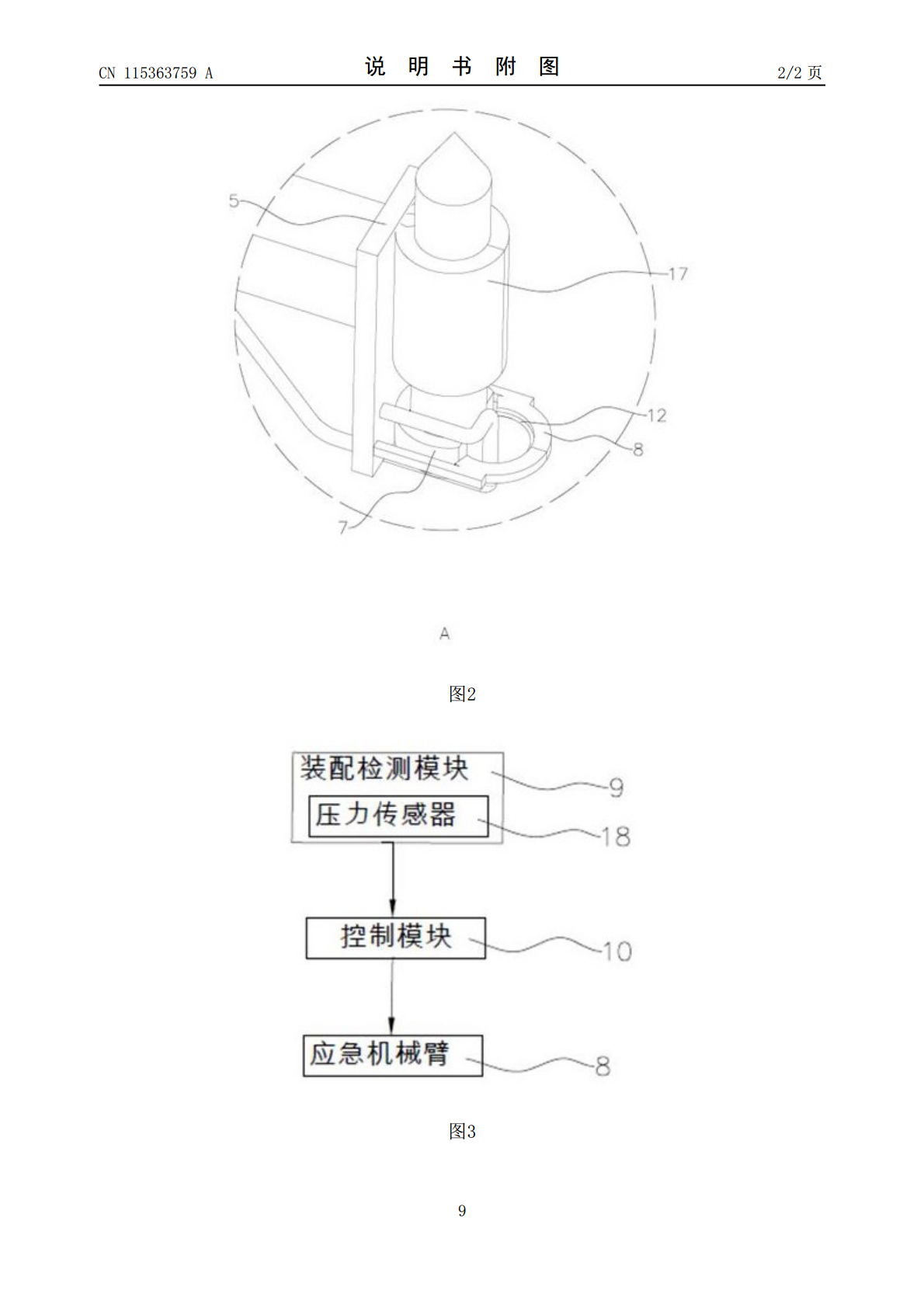
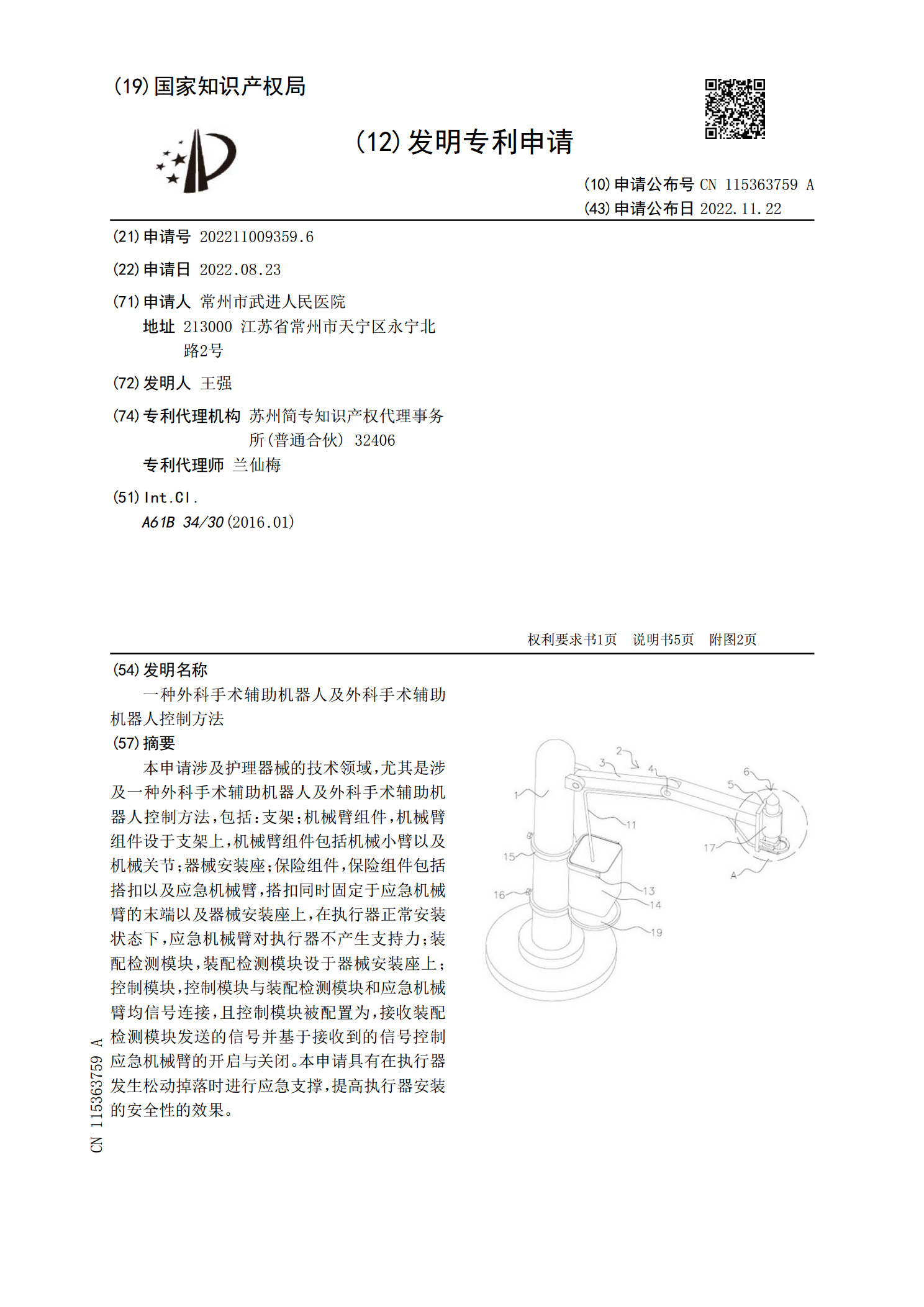
本申请涉及护理器械的技术领域,尤其是涉及一种外科手术辅助机器人及外科手术辅助机器人控制方法,包括:支架;机械臂组件,机械臂组件设于支架上,机械臂组件包括机械小臂以及机械关节;器械安装座;保险组件,保险组件包括搭扣以及应急机械臂,搭扣同时固定于应急机械臂的末端以及器械安装座上,在执行器正常安装状态下,应急机械臂对执行器不产生支持力;装配检测模块,装配检测模块设于器械安装座上;控制模块,控制模块与装配检测模块和应急机械臂均信号连接,且控制模块被配置为,接收装配检测模块发送的信号并基于接收到的信号控制应急机械臂

机器人辅助外科手术操作原理及临床应用.pdf
机器人辅助外科手术操作原理及临床应用引言近年来,随着科技的快速发展,机器人在医疗领域的应用越来越广泛。机器人辅助外科手术作为其中重要的应用之一,已经引起了广泛的关注和研究。本文将介绍机器人辅助外科手术的原理和临床应用,探讨其在提高手术精确度、减少手术创伤和改善治疗效果等方面的优势。一、机器人辅助外科手术的原理机器人辅助外科手术是指通过远程操作机器人系统来辅助进行外科手术。其核心原理是通过远程操作系统,医生可以操纵机器人完成手术操作。具体原理如下:1.机器人系统机器人系统由控制台、机械臂和手术工具组成。控制

一种机器人辅助微创外科手术用器械.pdf
本发明公开了一种机器人辅助微创外科手术器械,它包括顺次相连的驱动装置、连接导管和末端执行装置,驱动装置包括基座,在基座上通过轴承转动安装有三个传动轴,在每一传动轴上均固定套装有丝轮和抱紧块;末端执行装置包括固定在连接导管的前端的钳座以及由左开合钳体和右开合钳体组成的开合钳,与左、右开合钳体相连的丝轮以及左、右开合钳体转动的安装在钳座上的销轴上;连接导管以及左、右开合钳体分别与丝传动系统相连。本发明结构紧凑、重量轻,提高了器械的快换效率,传动精度高。
一种用于辅助微创外科手术的机器人主动支架.pdf
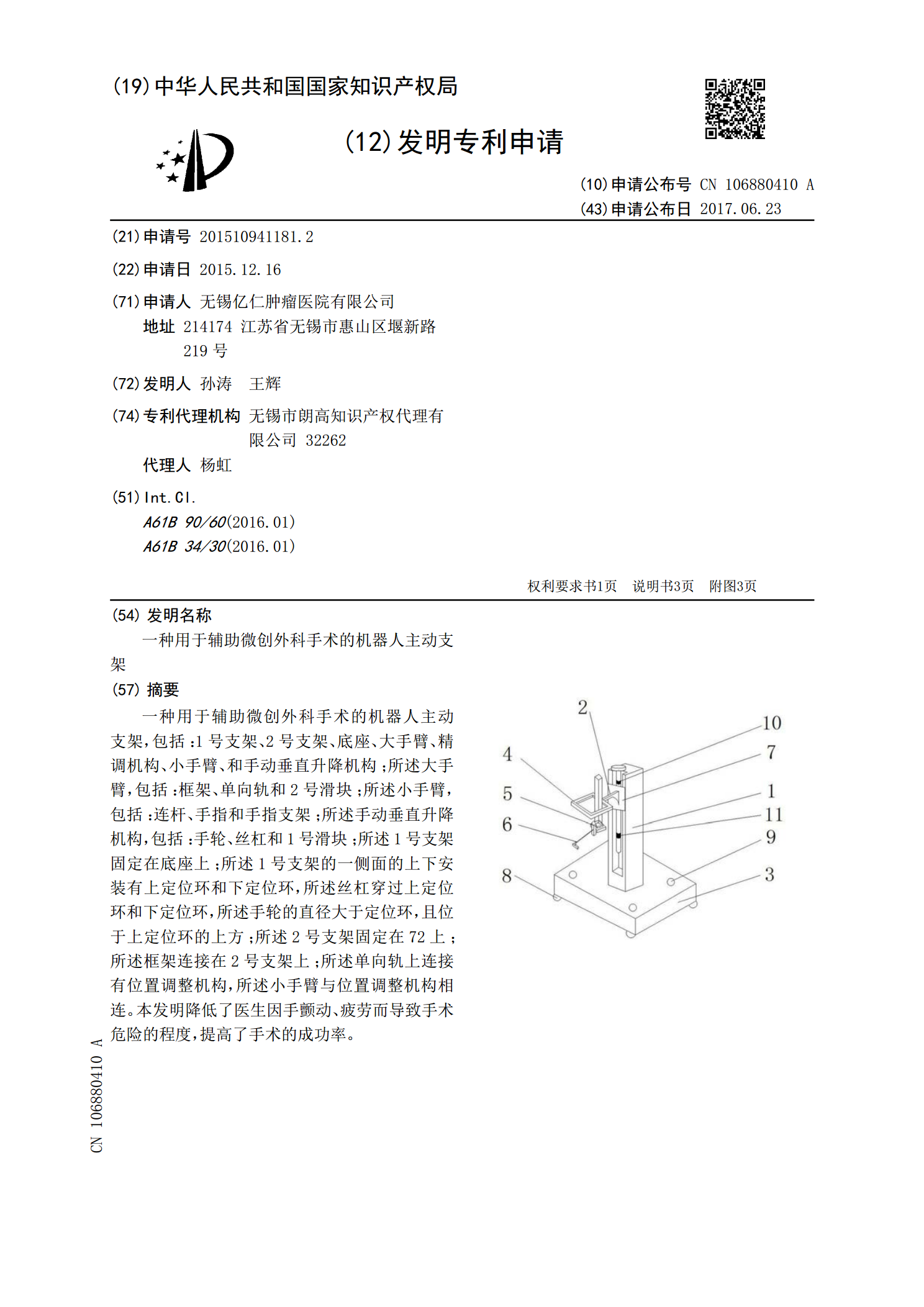
一种用于辅助微创外科手术的机器人主动支架,包括:1号支架、2号支架、底座、大手臂、精调机构、小手臂、和手动垂直升降机构;所述大手臂,包括:框架、单向轨和2号滑块;所述小手臂,包括:连杆、手指和手指支架;所述手动垂直升降机构,包括:手轮、丝杠和1号滑块;所述1号支架固定在底座上;所述1号支架的一侧面的上下安装有上定位环和下定位环,所述丝杠穿过上定位环和下定位环,所述手轮的直径大于定位环,且位于上定位环的上方;所述2号支架固定在72上;所述框架连接在2号支架上;所述单向轨上连接有位置调整机构,所述小手臂与位置

应用于机器人辅助微创外科手术的术前规划方法.docx
应用于机器人辅助微创外科手术的术前规划方法Title:SurgicalPlanningMethodsforRobot-AssistedMinimallyInvasiveSurgeryIntroduction:Robot-assistedminimallyinvasivesurgery(RAMIS)hasbecomeincreasinglyprevalentinrecentyears,enablingsurgeonstoperformcomplexprocedureswithenhancedprecisio