
用于支承臂系统的成型支承件.pdf

努力****甲寅


1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于支承臂系统的成型支承件.pdf
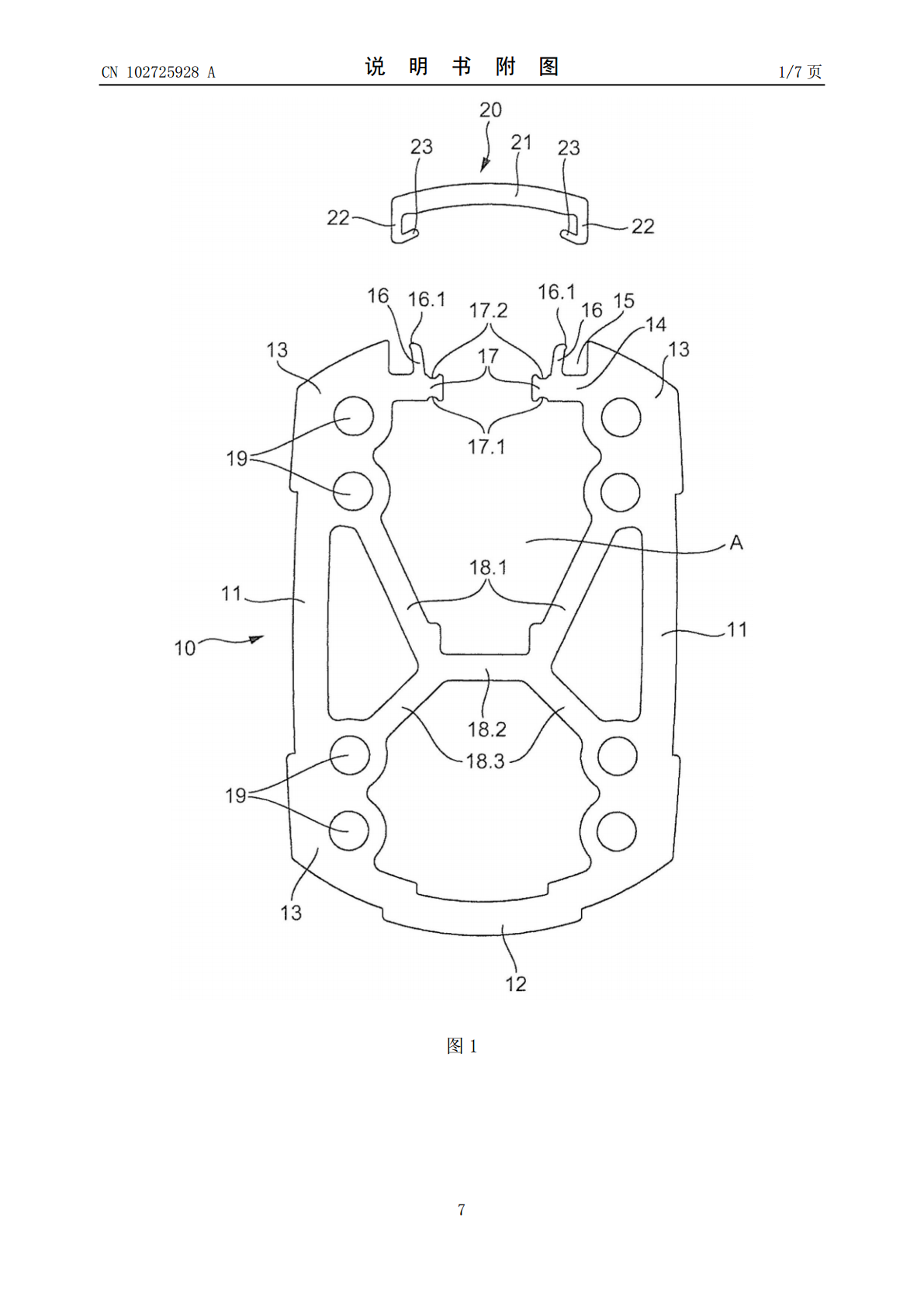
本发明涉及一种用于支承臂系统的成型支承件,该成型支承件具有朝环境开口的用于电缆等的容纳空间(A),其中在所述支承臂横截面的内部成型有连接元件(18.2),该连接元件(18.2)直接或间接地连接到所述成型支承件(10)的两个对置的侧壁(11)上。在这种成型支承件中,可以通过在所述连接元件(18.2)上间隔地连接两个限位元件(18.1)并使所述限位元件(18.1)从所述连接元件(18.2)起与所述侧壁(11)成角度地延伸而实现满足支承臂系统全部要求的、较高的型材刚度。
支承臂.pdf
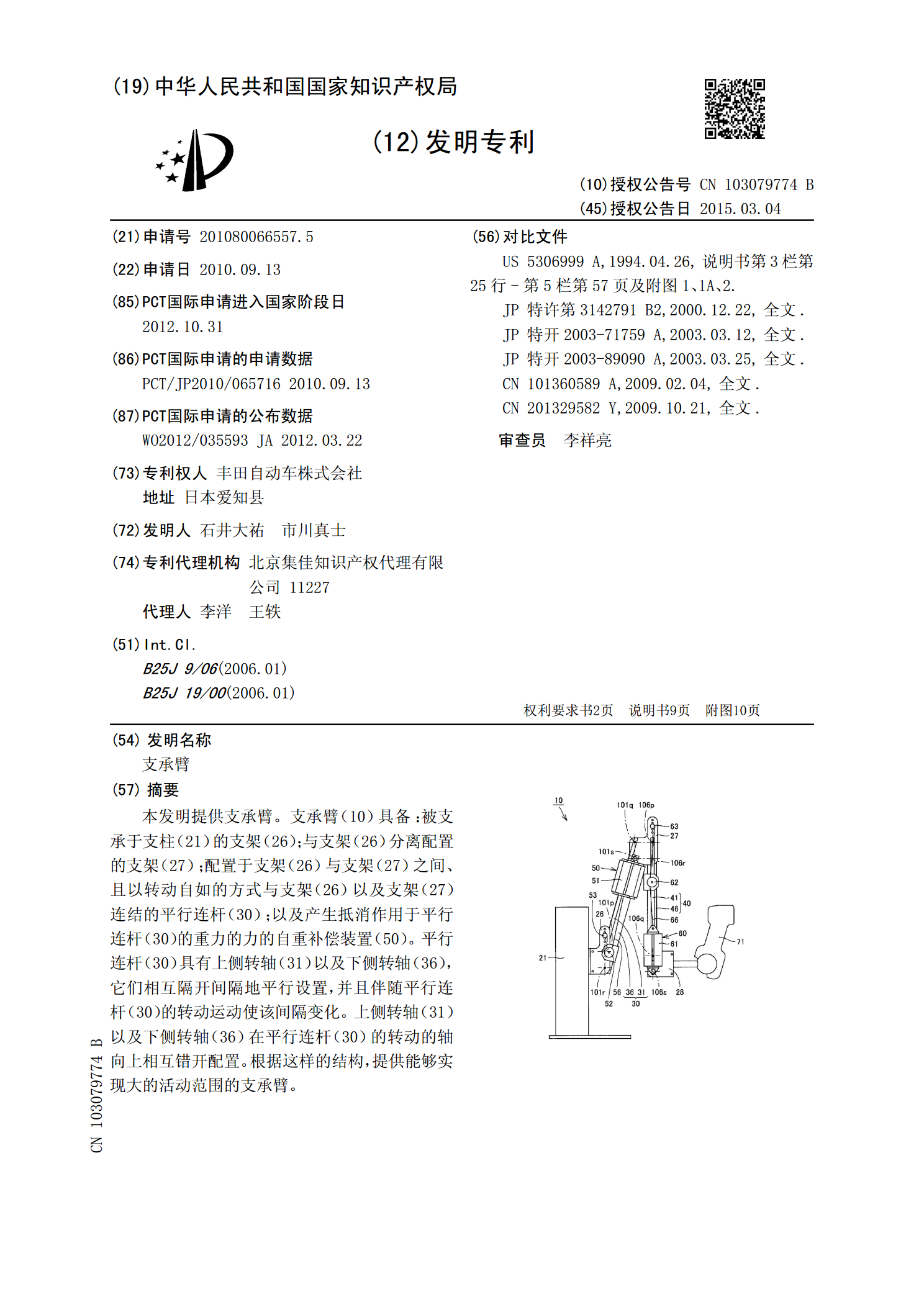
本发明提供支承臂。支承臂(10)具备:被支承于支柱(21)的支架(26);与支架(26)分离配置的支架(27);配置于支架(26)与支架(27)之间、且以转动自如的方式与支架(26)以及支架(27)连结的平行连杆(30);以及产生抵消作用于平行连杆(30)的重力的力的自重补偿装置(50)。平行连杆(30)具有上侧转轴(31)以及下侧转轴(36),它们相互隔开间隔地平行设置,并且伴随平行连杆(30)的转动运动使该间隔变化。上侧转轴(31)以及下侧转轴(36)在平行连杆(30)的转动的轴向上相互错开配置。根据
支承臂.pdf
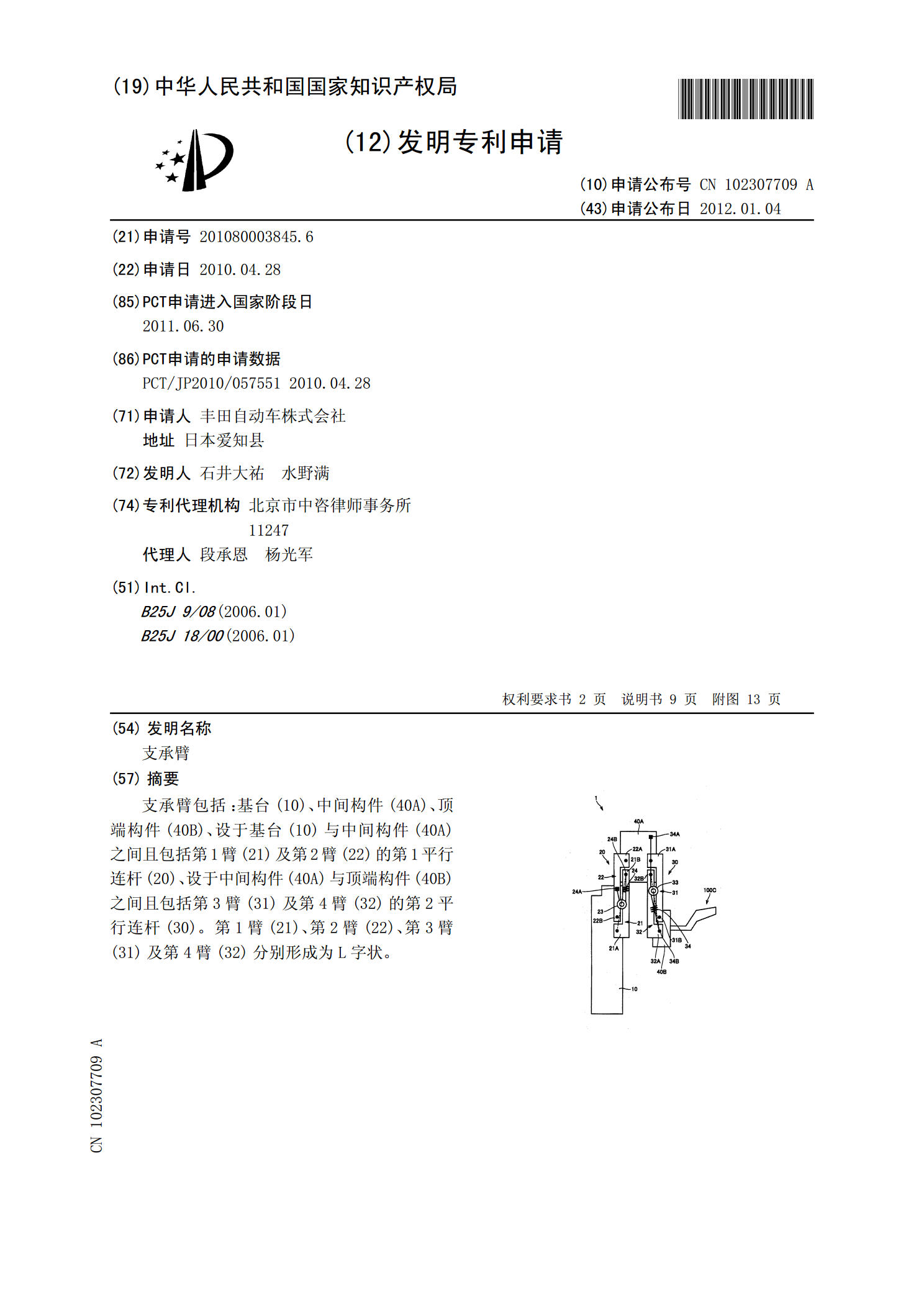
支承臂包括:基台(10)、中间构件(40A)、顶端构件(40B)、设于基台(10)与中间构件(40A)之间且包括第1臂(21)及第2臂(22)的第1平行连杆(20)、设于中间构件(40A)与顶端构件(40B)之间且包括第3臂(31)及第4臂(32)的第2平行连杆(30)。第1臂(21)、第2臂(22)、第3臂(31)及第4臂(32)分别形成为L字状。
装置支承臂.pdf
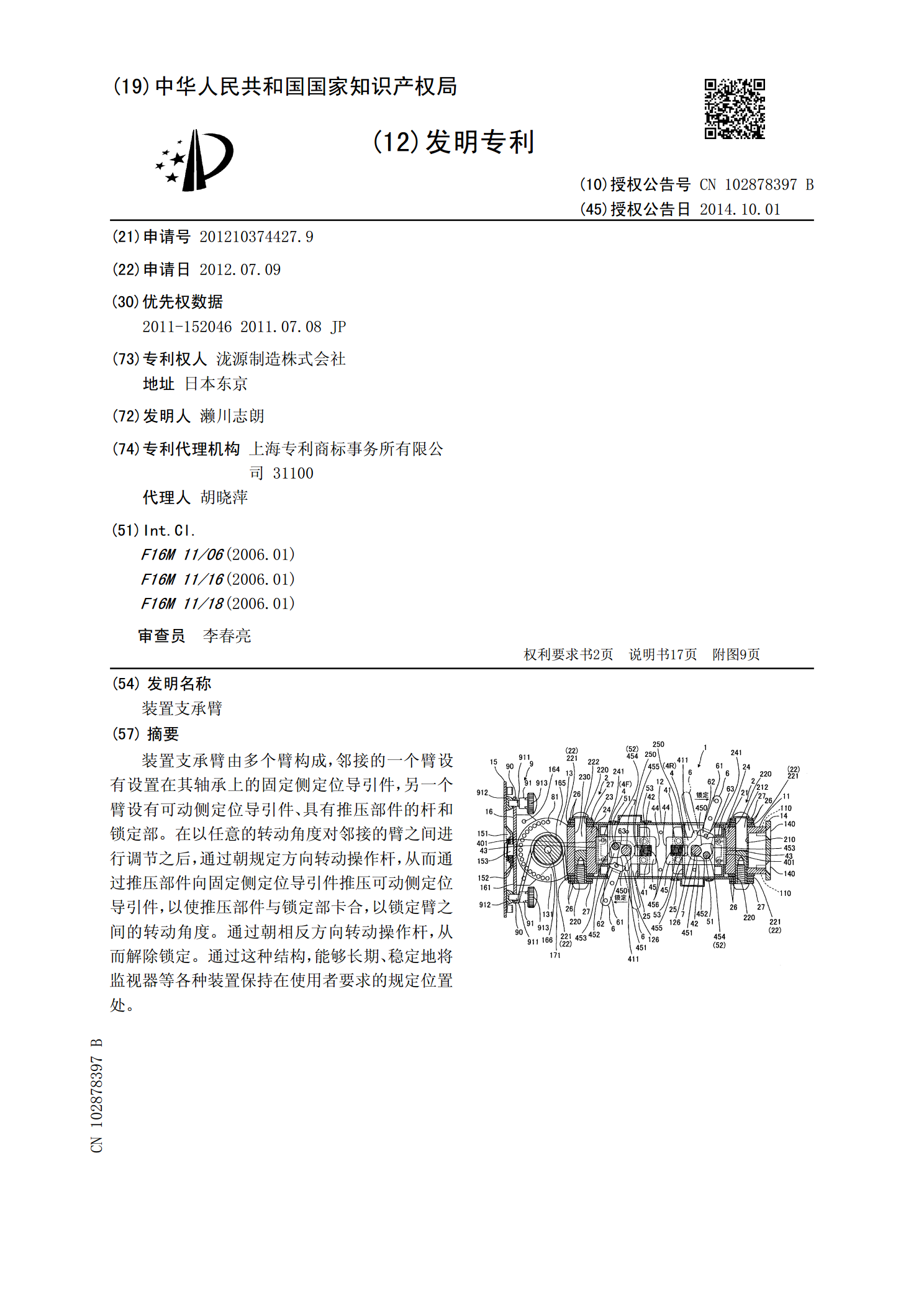
装置支承臂由多个臂构成,邻接的一个臂设有设置在其轴承上的固定侧定位导引件,另一个臂设有可动侧定位导引件、具有推压部件的杆和锁定部。在以任意的转动角度对邻接的臂之间进行调节之后,通过朝规定方向转动操作杆,从而通过推压部件向固定侧定位导引件推压可动侧定位导引件,以使推压部件与锁定部卡合,以锁定臂之间的转动角度。通过朝相反方向转动操作杆,从而解除锁定。通过这种结构,能够长期、稳定地将监视器等各种装置保持在使用者要求的规定位置处。

用于支承传感器的臂.pdf
本发明公开了传感器支承臂,所述传感器支承臂适于与呼吸面罩一起使用以使得所述传感器支承臂可延伸到呼吸面罩的密封表面下面。所述传感器支承臂适于在一端处固定到使用者佩戴的设备上,传感器设置在呼吸面罩内部中可定位的相对端处。所述传感器支承臂具有沿着所述传感器支承臂延伸的所述传感器所必需的引线连接件。所述传感器支承臂的宽度大于厚度并且包含挠性材料,使得所述传感器支承臂相对于纵轴和横轴均是挠性的。所述传感器支承臂设置有大致平坦的侧部。本发明还公开了具有自由地自支承的传感器臂的呼吸面罩。